一种物流码垛辅助装置
文献发布时间:2023-06-19 19:33:46
技术领域
本发明属于物流码放货物设备领域,尤其涉及一种物流码垛辅助装置。
背景技术
为了合理利用仓库的空间,仓库内会设置多个货架,然后将货物放置在每个货架的每一层置物板上,进行货物码放时,一般是由下层到上层依次码放,取货时是由上层至下层依次取货,无论取货还是放货时均采用叉车进行操作,但是使用叉车进行取放货时存在以下问题:一方面,将货物放置到较高货架的置物板上时,由于货物放置在叉车的货叉架上,货叉架在上升的时候,货物对操作人员的视线会产生遮挡,操作人员无法准确确定货叉架以及货物停止的位置,货架的层高是确定的,如果货叉架和货物不位于两层置物板之间,在将货物移动到货架内的过程中货物与货架就会碰撞,存在安全隐患;另一方面,在进行取货时由于货物以及托盘位于置物板上,并且高度较高,操作人员的视线被遮挡,叉车的货叉无法准确对准托盘的插孔,无法快速准确将货物取出。
发明内容
本发明的目的在于:为了解决上述现有技术存在的问题,而提出的一种物流码垛辅助装置。
为了实现上述目的,本发明采用了如下技术方案:一种物流码垛辅助装置,包括货架、辅助定位机构、安装部、换位机构、控制器,所述货架由立柱以及置物板组成,所述置物板上下等间距设置,四根所述立柱位于所述置物板的四角,所述安装部滑动设置在所述货架前部相邻两个所述立柱之间,所述辅助定位机构设置在安装部上,所述辅助定位机构用于对叉车的货叉上升高度定位,所述换位机构设置在一根所述立柱上,所述换位机构用于驱动所述安装部沿所述立柱上下移动,所述控制器设置在所述货架上,所述控制器用于控制所述换位机构和所述辅助定位机构。
作为上述技术方案的进一步描述:所述安装部包括两个滑动支架、第一伺服电机,两个所述滑动支架之间竖直有第一连接杆,两个所述滑动支架分别滑动设置在所述货架的前部左右两根所述立柱上,所述第一伺服电机固定在其中一个所述滑动支架上,所述第一伺服电机用于驱动所述辅助定位机构的转动。
作为上述技术方案的进一步描述:所述换位机构包括第二伺服电机、同步带、两个同步轮,两个所述同步轮分别设置在一根所述立柱上下两端,所述同步带与所述同步轮之间传动配合,所述第二伺服电机与其中一个所述同步轮同轴设置,所述同步带其中的一段与其对应的所述滑动支架之间固定连接,所述所述第一伺服电机、所述第二伺服电机均与所述控制器电连接。
作为上述技术方案的进一步描述:所述辅助定位机构包括第一触发板、第二触发板、两个安装盒、联动组件,两个所述安装盒对称设置在所述安装部之间,两个所述安装盒之间设置有第二连接杆,所述第一触发板设置在两个所述安装盒之间,第一触发板两端均设置有第一转动轴,所述第一转轴设置于所述安装盒内,所述第二触发板转动设置在两个所述安装盒之间,所述第二触发板两端均设置有第二转动轴,所述第二转动轴转动设置在所述安装盒上,所述第二转动轴与所述安装盒之间设置有扭簧,所述联动组件设置在第一触发板和第二触发板之间,在所述联动组件的作用下所述第二触发板转动带动所述第一触发板沿所述安装盒长度方向滑动;自然状态下,所述第一触发板长度方向且远离所述第一转动轴的边所在的水平面为第一水平面,所述第一水平面与所述置物板所在平面重合,所述置物板中间位置开设有通过孔,所述第二触发板远离所述第二转动轴的一端通过通过孔位于所述置物板的上方,所述第二触发板长度方向且远离第二转动轴的边所在的水平面为第二水平面,所述第二水平面位于置物板上方。
作为上述技术方案的进一步描述:所述安装盒整体呈长方体状,所述安装盒由壳体、内端盖、外端盖组成,所述壳体内形成矩形空腔,所述内端盖开设有与所述矩形空腔连通的腰行孔,所述外端盖上固定设置有转轴,所述转轴与所述滑动支架转动连接,其中一个所述转轴与所述第一伺服电机同轴转动。
作为上述技术方案的进一步描述:所述联动组件包括拨动弧板、触发杆、滑动块、弹簧、导向杆,所述滑动块滑动设置在所述矩形空腔内,所述滑动块沿所述壳体长度方向滑动,所述第一转动轴与所述滑动块转动连接,所述第一转动轴与所述滑动块之间设置有扭簧,所述触发杆设置在沿所述壳体长度方向远离所述第一转动轴的一侧,所述导向杆穿设于所述壳体上,所述导向杆一端与所述滑动块固定连接另一端与所述触发杆固定连接,所述弹簧位于所述矩形空腔内,所述弹簧套设在所述导向杆上,所述拨动弧板同轴固定在所述第二转动轴上,所述拨动杆始终与所述触发杆抵接。
作为上述技术方案的进一步描述:所述矩形空腔内还设置有第一感应开关、第二感应开关、第三感应开关,所述第二感应开关、第三感应开关沿矩形空腔长度方向间歇设置,所第一感应开关设置在第一转轴上,所述货架上还设置有警铃,当所述第一感应开关与所述第二感应开关或所述第三感应开关感应瞬间,所述警铃发出警报。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
(1)本发明结构简单操作方便,通过叉车的货叉与本装置的配合操作人员能够直观的知道货叉载货上升时何时停止、将货物放置在置物板上何时停止、取货时货叉上升到何时停止货叉与托盘的插孔对应、货叉抬升位于置物板上的货物时何时停止,操作人员操作货叉时能够有效避免货叉货货物与货架碰撞接触。
(2)该装置的换位机构能够调节辅助定位机构的位置,使得一个辅助定位机构适用不同层高的货架,通用性强,并节省生产成本。
(3)当置物板上放置货架后,第一触发板在第二触发板和联动组件的作用下第一触发板远离第一转轴的端部由第一水平面下降至第三水平面的同时也更靠近货架,使得货叉卸货完成后由上方下降时有更多空间。
附图说明
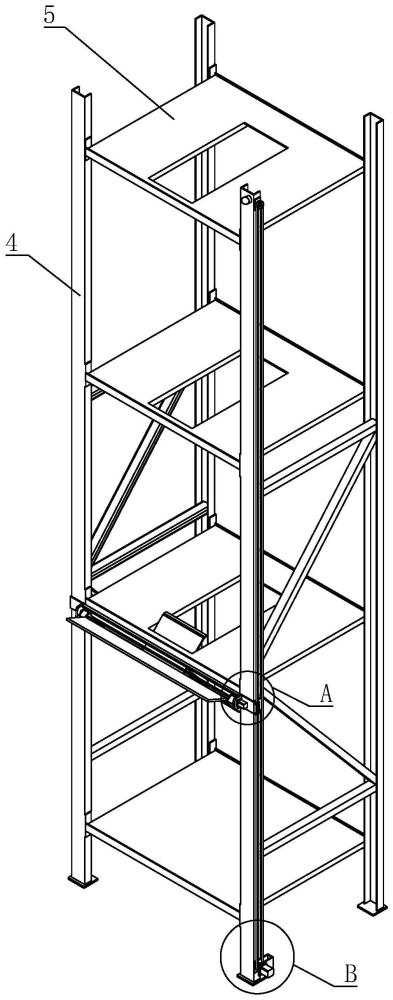
图1为本发明的立体结构示意图;
图2为图1中A处放大图;
图3为图1中B处放大图;
图4为本发明叉车的货叉抬升货物结构示意图;
图5为本发明叉车驱动货叉将货物放置到置物板上的结构示意图;
图6为图5中C处放大图;
图7为本发明辅助定位机构状态示意图,其中(Ⅰ)为置物板未放货状态图,(Ⅱ)为辅助定位机构沿立柱向上移动状态图,(Ⅲ)为辅助定位机构沿立柱向下移动状态图;
图8为本发明辅助定位机构与安装部爆炸示意图;
图9为本发明辅助定位机构结构示意图,其中置物板上未放货状态;
图10为本发明辅助定位机构第一种状态结构示意图,其中壳体和外端盖处于剖视状态;
图11为本发明辅助定位机构结构示意图,其中置物板上放货状态;
图12为本发明辅助定位机构第二种状态结构示意图,其中壳体和外端盖处于剖视状态。
图例说明:01、第一水平面;02、第二水平面;03、第三水平面;1、叉车;2、货叉;3、托盘;4、立柱;5、置物板;6、滑动支架;7、第一伺服电机;8、第一连接杆;9、第二伺服电机;10、同步带;11、同步轮;12、夹紧豁口;13、第一触发板;14、第二触发板;15、安装盒;151、第二连接杆;16、壳体;17、内端盖;18、外端盖;19、矩形空腔;20、转轴;21、第一转动轴;22、第二转动轴;23、拨动弧板;24、触发杆;25、滑动块;26、弹簧;27、导向杆;28、第二感应开关;29、第三感应开关。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-12,本发明提供一种物流码垛辅助装置的技术方案:
一种物流码垛辅助装置,包括货架、辅助定位机构、安装部、换位机构、控制器,货架由立柱4以及置物板5组成,置物板5上下等间距设置,四根立柱4位于置物板5的四角,安装部滑动设置在货架前部相邻两个立柱4之间,辅助定位机构设置在安装部上,辅助定位机构用于对货叉2上升高度定位,换位机构设置在一根立柱4上,换位机构用于驱动安装部沿立柱4上下移动,控制器设置在货架上,用于控制换位机构和辅助定位机构。
安装部包括两个滑动支架6、第一伺服电机7,两个滑动支架6之间通过第一连接杆8固定连接,两个滑动支架6分别滑动设置在货架前部左右两根立柱4上,第一伺服电机7固定在其中一个滑动支架6上,第一伺服电机7用于驱动辅助定位机构的转动。
换位机构包括第二伺服电机9、同步带10、两个同步轮11,两个同步轮11分别设置在一根立柱4上下两端,同步带10与同步轮11之间传动配合,第二伺服电机9与其中一个同步轮11同轴设置。同步带10其中的一段与一个滑动支架6之间固定连接,具体为,滑动支架6上设置有夹紧豁口12,同步带10位于夹紧豁口12内,通过螺栓将同步带10的一段与滑动支架6连接在一起,通过第二伺服电机9的驱动带动同步带10转动,使得同步带10带动滑动支架6沿立柱4上下移动。
辅助定位机构包括第一触发板13、第二触发板14、两个安装盒15、联动组件,两个安装盒15对称设置在安装部之间,两个安装盒15之间设置有第二连接杆151,使得两个安装盒15之间固定连接,安装盒15整体呈长方体状,安装盒15由壳体16、内端盖17、外端盖18组成,壳体16内形成矩形空腔19,内端盖17开设有与矩形空腔19连通的腰形孔,外端盖18上固定设置有转轴20,转轴20与滑动支架6转动连接,其中一个转轴20与第一伺服电机7同轴转动,第一伺服电机7转动带动安装盒15整体转动,联动组件设置在第一触发板13和第二触发板14之间,在联动组件的作用下第二触发板14转动带动第一触发板13沿壳体16长度方向滑动。
第一触发板13设置在两个安装盒15之间,第一触发板13两端均设置有第一转动轴21,初始状态时,第一触发板13长度方向且远离第一转动轴21的边所在的水平面为第一水平面01,第一水平面01与置物板5所在平面重合,第一转动轴21远离第一触发板13的一端穿过腰行孔位于矩形空腔19内,第二触发板14转动设置在两个安装盒15之间,第二触发板14两端均设置有第二转动轴22,第二转动轴22处设置有第一扭簧(图中未示出),置物板5中间位置开设有通过孔,初始状态时,第二触发板14远离第二转动轴22的一端通过通过孔位于置物板5的上方,第二触发板14长度方向且远离第二转动轴22的边所在的水平面为第二水平面02,第二水平面02位于置物板5上方。
联动组件包括拨动弧板23、触发杆24、滑动块25、弹簧26、导向杆27,滑动块25滑动设置在矩形空腔19内,滑动块25沿壳体16长度方向滑动,第一转动轴21与滑动块25转动连接,第一转动轴21与滑动块25之间设置有扭簧(图中未示出),触发杆24设置在沿壳体16长度方向远离第一转动轴21的一侧,导向杆27穿设于壳体16上,导向杆27一端与滑动块25固定连接另一端与触发杆24固定连接,弹簧26位于矩形空腔19内,弹簧26套设在导向杆27上,拨动弧板23同轴固定在第二转动轴22上,拨动杆始终与触发杆24抵接。货物放置在货架上时,第二触发板14长度方向且远离第二转动轴22的边所在的水平面在托盘3的作用下与置物板5重合,此时第一触发板13在联动组件的作用下,第一触发板13长度方向且远离第一转动轴21的边所在的水平面为第三水平面03,第三水平面03位于置物板5下方,第二水平面02与置物板5之间的间距等于第一水平面01与第三水平面03的间距。
第一转动轴21上固定设置有第一感应开关,第一感应开关位于矩形空腔19内,矩形空腔19内设置有第二感应开关28、第三感应开关29,第二感应开关28、第三感应开关29沿矩形空腔19长度方向间歇设置,货架上设置有警铃,当第一感应开关与第二感应开关28或第三感应开关29感应连接瞬间,警铃发出警报。
工作原理:货架上未进行放货即初始状态时,参照图1和图7中的(Ⅰ)以及图10,在扭簧的作用下第一触发板13、第二触发板14保持不动,第一触发板13长度方向且远离第一转动轴21的边位于第一水平面01,第二触发板14长度方向且远离第二转动轴22的边位于第二水平面02,在弹簧26的作用下滑动块25位于矩形空腔19远离触发杆24的一侧,拨动弧板23与触发杆24抵接;
进行装货时,操作人员通过叉车1将货物运输到货架的前部,并使得货物正对货架,通过移动叉车1使得货叉2位于第一触发板13的下方,具体地,地面上设置有标线,使得货叉2的端部位于货架与标线之间即可,然后缓慢抬升货叉2并带动放有货物的托盘3竖直向上移动,随着货叉2的上移,货叉2端部与第一触发板13下表面接触并使得第一触发板13转动,第一转动轴21转动使得第一感应开关与第二感应开关28断开,当转动到极限位置,如图4所示。随着货叉2的继续上升,货叉2端部与第一触发板13脱离接触,随后在扭簧的作用下,第一触发板13转动恢复初始状态,同时第一感应开关与第二感应开关28相互感应,此时警铃发出警报,操作人员立即停止继续上升货叉2,此时托盘3的下表面与第二水平面02重合。然后操作人员驱动叉车1移动使得托盘3以及货物位于置物板5正上方,然后操作人员下放货物,此时托盘3的下表面下压第二触发板14长度方向且远离第二转动轴22的边,使得第二触发板14绕第二转动轴22转动,同时第二触发板14长度方向且远离第二转动轴22的边与托盘3下表面发生相对滑动,随着第二触发板14的转动,第二转动轴22带动拨动弧板23转动,拨动弧板23驱动触发杆24,触发杆24带动导向杆27并压缩弹簧26使得滑动块25带动第一转动轴21沿壳体16长度方向移动,当托盘3完全放置到置物板5上时,第二触发板14长度方向且远离第二转动轴22的边所在的水平面与置物板5重合,此时第一转动轴21上的第一感应器与第三感应器相互感应,此时警铃发出警报,操作人员立即停止货叉2下降,此时,第一触发板13长度方向且远离第一转动轴21的边位于第三水平面03。然后将货叉2由托盘3的插孔抽出。
取货时,移动叉车1,使得货叉2正对货架并且使得货叉2的端部位于货架与标线之间,然后上抬货叉2,随着货叉2的上移,货叉2端部与第一触发板13下表面接触并使得第一触发板13转动,第一转动轴21转动使得第一感应开关与第三感应开关29断开,当转动到极限位置,随着货叉2的继续上升,货叉2端部与第一触发板13脱离接触,随后在扭簧的作用下,第一触发板13转动使得第一感应开关与第三感应开关29相互感应,此时警铃发出警报,操作人员立即停止继续上升货叉2,此时货叉2正对托盘3的插孔,然后将货叉2插入托盘3的插孔,随后上抬货叉2,货叉2带动托盘3向上移动,在扭簧的作用下第二触发板14转动,直至托盘3下表面与第二触发板14脱离接触,此时在弹簧26的作用下滑动块25带动第一转动轴21以及第一触发板13恢复初始状态,第一感应开关与第三感应开关29断开后,第一感应开关与第二感应开关28相互感应并使得警铃发出警报,操作人员立即停止上台货叉2,避免由于视线被遮挡使得货物的顶部碰撞到上层置物板5的下表面。随后操作叉车1使得货叉2和货物退出货架,然后下降货叉2,完成取货。
辅助定位机构进行换位时,辅助定位机构换位分为向上移动到上层置物板5指定位置,和下移到下层置物板5指定位置,辅助定位机构每一次上移或者下移的距离都是固定的;辅助定位机构上移时,参照图7,首先启动第一伺服电机7顺时针转动使得转轴20带动辅助定位机构转动第一角度,第一角度为第一触发板13初始状态至第一触发板13与货架的前部平行,辅助定位机构由图7中的(Ⅰ)状态转动至图7中的(Ⅱ)状态。然后驱动第二伺服电机9转动带动同步带10转动,同步带10转动带动安装部和辅助定位机构上移,移动时当第二触发板14接触置物板5边缘时会使得第二转动轴22转动使得第二触发板14能够跨过置物板5,当第二伺服电机9驱动安装部和辅助定位机构到达上层时第二伺服电机9停止驱动并使转轴20固定,随后第一伺服电机7逆时针转动第一角度。
辅助定位机构下移时,参照图7,首先启动第一伺服电机7顺时针转动使得转轴20带动辅助定位机构转动第二角度,第二角度为第二触发板14初始状态至第二触发板14远离第二转轴20的端部位于货架的前部外侧,辅助定位机构由图7中的(Ⅰ)状态转动至图7中的(Ⅲ)状态。然后驱动第二伺服电机9转动带动同步带10转动,同步带10转动带动安装部和辅助定位机构下移,移动时当第一触发板13接触置物板5边缘时会使得第一转动轴21转动使得第一触发板13能够跨过置物板5,当第二伺服电机9驱动安装部和辅助定位机构到达下层时第二伺服电机9停止驱动并使转轴20固定,随后第一伺服电机7逆时针转动第二角度。
上述第一伺服电机7、第二伺服电机9的转动均受控制器控制。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不限于此,熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种应用于搬运物流包裹的物流码垛机
- 一种自动码垛装置
- 一种物流仓库人工码垛辅助对齐支架
- 一种自动化物流码垛系统用码垛装置