一种用于库坝巡检的单体双体切换式水面无人舰艇
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及一种用于库坝巡检的水面无人舰艇,属于水利水电技术领域。
背景技术
大坝巡视检查具有全面性、及时性和直观性等特点,根据国内外有关资料统计,通过大坝巡视检查发现的大坝重大安全隐患,约占出险水库总数的70%;因此定期定时进行库坝巡检是保证水库大坝安全运行的重要工作。目前大坝巡检工作一般使用水面无人舰艇作为运行载体,这种水面无人舰艇均是单体船舶结构,在遇到极端天气时,这种单体结构的水面无人舰艇运行稳定性较差,操控灵活性不足,难以在极端天气时安全的进行库坝巡检工作。双体船是一种在两个分离的水下船体上部用加强构架连接成一个整体的船舶;两个船体内各设一部主机和一个推进器;这种船体结构具有稳定性好、安全舒适和操纵灵活等优点。
发明内容
本发明为解决单体结构的水面无人舰艇难以在极端天气时安全的进行库坝巡检工作的问题,进而提出一种用于库坝巡检的单体双体切换式水面无人舰艇。
本发明为解决上述问题采取的技术方案是:本发明包括中间船体、两个侧船体和四个升降机构;中间船体的一侧通过两个并排设置的升降机构与一个侧船体连接,中间船体的另一侧通过两个并排设置的升降机构与另一个侧船体连接。
进一步的,本发明还包括仪器搭载平台;所述仪器搭载平台安装在中间船体的上表面,所述仪器搭载平台包括基座、转台组件、控制模块和天线;基座固定在中间船体的上表面,所述转台组件安装在基座的前端,控制模块安装在基座的中部,天线固定安装在基座的后端,天线的信号输出端与控制模块的信号接收端连接。
进一步的,所述转台组件包括转台、转台电机、转台轴、主动齿轮、从动齿轮和下轴承;下轴承安装在基座的前端,转台轴的下端同轴固定插装在下轴承的内圈中,转台下表面的中部与转台轴的上端固定连接,主动齿轮同轴固定套装转台电机的电机轴上,转台电机固定安装在基座的前端内,从动齿轮同轴固定套装在转台轴上,主动齿轮与从动齿轮啮合。
进一步的,所述转台组件还包括防水外壳和上轴承;防水外壳扣装在基座的前端,上轴承的外圈固定在防水外壳上表面的通孔内,转台轴的上部同轴固定插装在上轴承的内圈中。
进一步的,升降机构包括升降电机、丝杠、上螺母、下螺母、上连接架和下连接架;升降电机固定安装在中间船体侧面的下部,丝杠的竖直设置,丝杠的下端与升降电机的电机轴同轴固定连接,上螺母和下螺母由上至下依次套装在丝杠上,上螺母通过上连接架与侧船体固定连接,下螺母通过下连接架与侧船体固定连接。
进一步的,升降机构还包括上限位板、上限位轴承、下限位板和下限位轴承;上限位轴承的内圈同轴固定套装在丝杠的上端,下限位轴承的内圈同轴固定套装在丝杠的下端,上限位板与上限位轴承的外圈固定连接,且上限位板与中间船体侧面的顶部固定连接,下限位板与下限位轴承的外圈固定连接,且下限位板与中间船体侧面的底部固定连接。
进一步的,本发明还包括重心稳定水仓、第一进水泵、第一排水泵和蓄电池组;重心稳定水仓固定安装在中间船体内底部,第一进水泵设置在中间船体内的前部,第一排水泵设置在中间船体的后部,蓄电池组设置在中间船体内的上部,第一进水泵的进水口通过进水管与中间船体底部的进水口连接,且所述进水管上设有电控电磁阀,第一进水泵的出水口与重心稳定水仓的进水口连接,第一排水泵的进水口与重心稳定水仓的出水口连接,第一排水泵的出水口通过排水管与中间船体后部的排水口连接,所述排水管上设有电控电磁阀。
进一步的,本发明还包括第二进水泵、第二排水泵、配重水箱、动力电机和螺旋桨;动力电机固定安装在侧船体后端的下部,螺旋桨同轴固定套装在动力电机的电机轴上,配重水箱固定设置在侧船体内的中部,第二进水泵设置在侧船体内的前部,第二排水泵设置在侧船体内的后部,第二进水泵的进水口通过进水管与侧船体侧面下部的进水口连接,且所述进水管上设有电控电磁阀,第二进水泵的出水口与配重水箱的进水口连接,第二排水泵的出水口通过排水管与侧船体侧面下部的排水口连接,且所述排水管上设有电控电磁阀,第二排水泵的进水口与配重水箱的出水口连接。
本发明的有益效果是:
1、本发明能够实现单体船和双体船两个中结构的切换,当库坝内水面风浪较大时,将中间船体升起,使其底面高于两个侧船体的底面,即中间船体的底面脱离与水面接触,此时本发明变为双体船结构,在风浪较大的水面运行时更加稳定,操控更加灵活,当水面风浪较为平静时,将中间船体降回初始位置,使其底面与两个侧船体的底面处于同一平面,及中间船体的底面与侧船体的底面共同与水面接触;
2、本发明的中间船体上设有仪器搭载平台,仪器搭载平台能够安装各种检测仪器,且其前端的转台能够提供水平面360度的旋转定位角度;
3、本发明适用于进行库坝内巡检工作,且能够适应各种极端天气,安全性高,操控性强。
附图说明
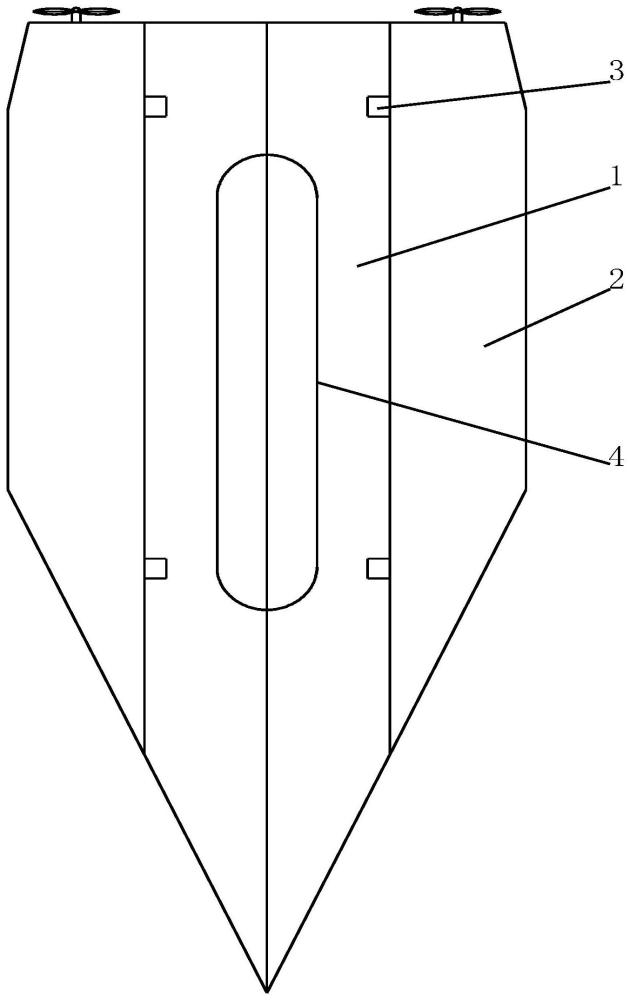
图1是本发明的俯视图;
图2是本发明为双体结构时前端面的正视图;
图3是本发明为单体结构时前端面的正视图;
图4是中间船体的结构示意图;
图5是升降机构的结构示意图;
图6是侧船体的结构示意图。
具体实施方式
具体实施方式一:结合图1至图3说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇包括中间船体1、两个侧船体2和四个升降机构3;中间船体1的一侧通过两个并排设置的升降机构与一个侧船体2连接,中间船体1的另一侧通过两个并排设置的升降机构3与另一个侧船体2连接。
具体实施方式二:结合图4说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇还包括仪器搭载平台4;所述仪器搭载平台4安装在中间船体1的上表面,所述仪器搭载平台4包括基座401、转台组件、控制模块402和天线403;基座401固定在中间船体1的上表面,所述转台组件安装在基座401的前端,控制模块402安装在基座401的中部,天线403固定安装在基座401的后端,天线403的信号输出端与控制模块402的信号接收端连接。
控制模块402通过天线403接收远程控制信号,并对远程控制信号处理,操作人员可通过控制模块402对转台电机405、升降电机301、第一进水泵6、第一排水泵7、第二进水泵9、第二排水泵10、动力电机12进行操控。
其它组成及连接关系与具体实施方式一相同。
具体实施方式三:结合图4说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇的所述转台组件包括转台404、转台电机405、转台轴406、主动齿轮407、从动齿轮408和下轴承409;下轴承409安装在基座401的前端,转台轴406的下端同轴固定插装在下轴承409的内圈中,转台404下表面的中部与转台轴406的上端固定连接,主动齿轮407同轴固定套装转台电机405的电机轴上,转台电机405固定安装在基座401的前端内,从动齿轮408同轴固定套装在转台轴406上,主动齿轮407与从动齿轮408啮合。其它组成及连接关系与具体实施方式一相同。
具体实施方式四:结合图4说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇的所述转台组件还包括防水外壳410和上轴承411;防水外壳410扣装在基座401的前端,上轴承411的外圈固定在防水外壳410上表面的通孔内,转台轴406的上部同轴固定插装在上轴承411的内圈中。其它组成及连接关系与具体实施方式三相同。
具体实施方式五:结合图5说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇的升降机构3包括升降电机301、丝杠302、上螺母303、下螺母304、上连接架305和下连接架306;升降电机301固定安装在中间船体1侧面的下部,丝杠302的竖直设置,丝杠302的下端与升降电机301的电机轴同轴固定连接,上螺母303和下螺母304由上至下依次套装在丝杠302上,上螺母303通过上连接架305与侧船体2固定连接,下螺母304通过下连接架306与侧船体2固定连接。其它组成及连接关系与具体实施方式一相同。
具体实施方式六:结合图5说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇的升降机构3还包括上限位板307、上限位轴承308、下限位板309和下限位轴承310;上限位轴承308的内圈同轴固定套装在丝杠302的上端,下限位轴承320的内圈同轴固定套装在丝杠302的下端,上限位板307与上限位轴承308的外圈固定连接,且上限位板307与中间船体1侧面的顶部固定连接,下限位板309与下限位轴承310的外圈固定连接,且下限位板309与中间船体1侧面的底部固定连接。其它组成及连接关系与具体实施方式五相同。
具体实施方式七:结合图4说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇还包括重心稳定水仓5、第一进水泵6、第一排水泵7和蓄电池组8;重心稳定水仓5固定安装在中间船体1内底部,第一进水泵6设置在中间船体1内的前部,第一排水泵7设置在中间船体1的后部,蓄电池组8设置在中间船体1内的上部,第一进水泵6的进水口通过进水管与中间船体1底部的进水口连接,且所述进水管上设有电控电磁阀,第一进水泵6的出水口与重心稳定水仓5的进水口连接,第一排水泵7的进水口与重心稳定水仓5的出水口连接,第一排水泵7的出水口通过排水管与中间船体1后部的排水口连接,所述排水管上设有电控电磁阀。
蓄电池组8为控制模块402、转台电机405、升降电机301、第一进水泵6、第一排水泵7、第二进水泵9、第二排水泵10、动力电机12提供电力;
当中间船体1的底面下降至与两个侧船体2的底面处于同一平面时,即整个水面舰艇变成单船体结构时,第一进水泵6向重心稳定水仓5内注水,使中间船体的重量大于两个侧船体2的重量,这样可以使整个舰艇的中心稳定的保持在中部,保证整个舰艇的运行安全;
当中间船体1的底面上升时,第一排水泵7将重心稳定水仓5内的水排空,使中间船体1的重量小于两个侧船体2的重量。
其它组成及连接关系与具体实施方式一相同。
具体实施方式八:结合图6说明本实施方式,本实施方式所述一种用于库坝巡检的单体双体切换式水面无人舰艇还包括第二进水泵9、第二排水泵10、配重水箱11、动力电机12和螺旋桨13;动力电机12固定安装在侧船体2后端的下部,螺旋桨13同轴固定套装在动力电机12的电机轴上,配重水箱11固定设置在侧船体2内的中部,第二进水泵9设置在侧船体2内的前部,第二排水泵10设置在侧船体2内的后部,第二进水泵9的进水口通过进水管与侧船体2侧面下部的进水口连接,且所述进水管上设有电控电磁阀,第二进水泵9的出水口与配重水箱11的进水口连接,第二排水泵10的出水口通过排水管与侧船体2侧面下部的排水口连接,且所述排水管上设有电控电磁阀,第二排水泵10的进水口与配重水箱11的出水口连接。其它组成及连接关系与具体实施方式一相同。
工作原理
中间船体1在升降机构3的驱动下能够相对于两个侧船体2上下移动,当中间船体1的底面被升降机构3提升至高于两个侧船体2的底面时,中间船体1的底面脱离与水面的基础,此时整个无人舰艇为双体船结构,其稳定性和操控灵活性较高;当中间船体1的底面被升降机构3下降到与两个侧船体2的底面处于同一平面时,中间船体1的底面与两个侧船体2的底面一同与水面接触,此时整个无人舰艇为单体船结构。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。