一种带视觉装置的加工中心运动定位保护系统
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及加工中心技术领域,尤其涉及一种带视觉装置的加工中心运动定位保护系统。
背景技术
加工中心是一种由程序控制的自动化机床,其控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,通过计算机将其译码,从而使机床动作并加工零件。加工中心的零件加工程序,是从零件图纸到生成刀具轨迹的数控加工全过程,可通过手工编程或计算机自动编程来获得。
中国专利公开号:CN107479500B,公开了一种带视觉装置的加工中心运动定位数控系统及方法,包括加工中心数控子系统、伺服驱动和位置检测子系统、视觉检测子系统,引入视觉检测装置,并在原有工作流程中加入图像处理、走刀前碰撞预判、安全/危险连锁等工作流程;由此可见,所述现有技术中存在以下问题:未对加工过程中的加工件进行监控,未能根据加工件的硬度对刀具的硬度进行选定,影响了加工件加工的精度。
发明内容
为此,本发明提供一种带视觉装置的加工中心运动定位保护系统,用以克服现有技术中未对加工过程中的加工件进行监控,未能根据加工件的硬度对刀具的硬度进行选定,使加工件的加工的精度产生误差的问题。
为实现上述目的,本发明提供一种带视觉装置的加工中心运动定位保护系统,包括:
加工中心,其内部设有若干种类刀具且加工中心针对各种类的刀具均设有若干不同硬度的替换刀具,加工中心内还设有用以获取加工件尺寸及刀具振动频率的视觉检测模块以及用以获取加工件表面粗糙度的粗糙度测量仪;
比对模块,其与所述加工中心中的对应部件相连,用以分别将所述视觉检测模块获取的所述刀具在不同高度的实际运行轨迹与对应的预设运行轨迹进行比对以分别确定该刀具在不同高度下的实际运行轨迹与对应的预设运行轨迹的重合度;所述比对模块在所述加工中心选用单个所述刀具时以该刀具所处的初始点位为原点建立空间直角坐标系,并根据使用者设置的编程信息中刀具运行过程中在不同垂直坐标下的运行轨迹获取该刀具在本次加工过程中不同高度下的预设运行轨迹;
判定模块,其与所述比对模块相连,用以根据所述刀具在不同高度下的实际运行轨迹与对应的预设运行轨迹的重合度判定该刀具在该高度下的运行状况是否符合预设标准;所述判定模块在初步判定所述刀具在单个高度下的运行状况不符合标准时根据所述实际运行轨迹的轮廓与所述运行轨迹的轮廓的平行度对该刀具在该高度下运行状况不符合标准的原因进行进一步判定;
调节模块,其分别与所述加工中心、所述比对模块和所述判定模块的对应部件相连,用以根据判定模块的判定结果重新选取对应硬度的刀具,以及,将刀具在加工过程中的转速、移动速度或单次下降的高度调节至对应值。
进一步地,所述判定模块根据使用者设置的编程信息获取不同高度对应的刀具的预设轨迹曲线,针对单一高度比对模块将所述视觉检测模块获取的刀具运行的实际轨迹的曲线与预设轨迹的曲线重合比对以获取轨迹曲线重合的长度占预设轨迹的曲线长度的比重以确定刀具运行的实际轨迹曲线与预设轨迹曲线的重合度;所述判定模块根据单个高度下的实际运行轨迹与对应的预设运行轨迹的重合度确定加工中心的运行状态是否符合预设标准的判定方式,其中:
第一判定方式为所述判定模块判定所述加工中心的运行状况不符合预设标准,并发出针对加工中心异常的警报;所述第一判定方式满足该高度下的实际运行轨迹与对应的预设运行轨迹的重合度小于等于第一预设重合度;
第二判定方式为所述判定模块初步判定加工中心的运行参数不符合预设标准,根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度对加工中心的运行状态进行二次判定;所述第二判定方式满足该高度下的实际运行轨迹与对应的预设运行轨迹的重合度小于等于第二预设重合度且大于所述第一预设重合度;
第三判定方式为所述判定模块判定加工中心的运行参数符合预设标准,并控制加工中心以当前运行参数运行;所述第三判定方式满足该高度下的实际运行轨迹与对应的预设运行轨迹的重合度大于等于所述第二预设重合度。
进一步地,所述判定模块在所述第二判定方式下所述比对模块将预设轨迹的曲线与实际轨迹的曲线进行比对以获取平行的曲线的长度占实际轨迹的曲线的总长度的比重以获得刀具运行的实际轨迹曲线与预设轨迹曲线的平行度;
所述判定模块根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度确定加工中心的运行状态是否符合预设标准的二次判定方式,其中:
第一二次判定方式为所述判定模块判定加工中心的运行状态不符合预设标准,并控制加工中心终止运行;所述第一二次判定方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度小于等于预设第一预设平行度;
第二二次判定方式为所述判定模块判定所述加工中心的运行状态不符合预设标准,并根据计算的刀具评价值选定对应的替换刀具作为加工刀具;所述第二二次判定方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度小于等于第二预设平行度且大于所述第一预设平行度;
第三二次判定方式为所述判定模块判定所述加工中心的运行状态不符合预设标准,并根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值将所述刀具的移动速度降低至对应值;所述第三二次判定方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度大于所述第二预设平行度。
进一步地,所述判定模块在第所述第二二次判定方式下计算刀具评价值K,设定刀具评价值的计算公式为
进一步地,所述调节模块根据当前刀具评价值与预设标准刀具评价值的差值选定当前刀具的替换刀具中的对应硬度的替换刀具作为加工刀具的刀具选定方式,其中:
第一刀具选定方式为所述调节模块使用第一硬度调节系数将判定模块中预设的当前刀具的硬度调节至对应值,并根据调节后的硬度选定对应的替换刀具作为加工刀具;所述第一刀具选定方式满足当前刀具评价值与预设标准刀具评价值的差值小于等于第一预设差值;
第二刀具选定方式为所述调节模块使用第二硬度调节系数将判定模块中预设的当前刀具的硬度调节至对应值,并根据调节后的硬度选定对应的替换刀具作为加工刀具;所述第二刀具选定方式满足当前刀具评价值与预设标准刀具评价值的差值小于等于第二预设差值且大于所述第一预设差值;
第三刀具选定方式为所述调节模块使用第三硬度调节系数将判定模块中预设的当前刀具的硬度调节至对应值,并根据调节后的硬度选定对应的替换刀具作为加工刀具;所述第三刀具选定方式满足当前刀具评价值与预设标准刀具评价值的差值大于所述第二预设差值。
进一步地,所述调节模块在所述第三二次判定方式下根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值确定所述刀具的移动速度的速度调节方式,其中:
第一速度调节方式为所述调节模块使用第一速度调节系数将所述刀具的移动速度降低至第一速度;所述第一速度调节方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值小于等于第一预设平行度差值;
第二速度调节方式为所述调节模块使用第二速度调节系数将所述刀具的移动速度降低至第二速度;所述第二速度调节方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值小于等于第二预设平行度差值且大于所述第一预设平行度差值;
第三速度调节方式为所述调节模块使用第三速度调节系数将所述刀具的移动速度降低至第三速度;所述第三速度调节方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值大于所述第二预设平行度差值。
进一步地,所述调节模块在第一预设条件下根据所述粗糙度测量仪获取的加工件侧壁的粗糙度确定刀具单次下降的高度△Z的高度调节方式,其中:
第一高度调节方式为所述调节模块使用当前刀具单次下降的高度△Z作为刀具单次下降的高度;所述第一高度调节方式满足加工件侧壁的粗糙度小等于第一预设粗糙度;
第二高度调节方式为所述调节模块使用第一预设高度调节系数将刀具单次下降的高度△Z降低至第一高度Z1;所述第二高度调节方式满足加工件侧壁的粗糙度小等于第二预设粗糙度且大于所述第一预设高度;
第三高度调节方式为所述调节模块使用第二预设高度调节系数将刀具单次下降的高度△Z降低至第二高度;所述第三高度调节方式满足加工件侧壁的粗糙度大于所述第二预设高度Z2;
所述第一预设条件为所述判定模块判定加工中心运行预设时长。
进一步地,所述调节模块在第二预设条件下根据使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值确定刀具沿X轴和Y轴的移动速度的调节方式,其中:
第一调节方式为所述调节模块使用第一调节系数将刀具沿X轴和Y轴的移动速度调节至对应值;所述第一调节方式满足使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值小于等于第一预设高度差值;
第二调节方式为所述调节模块使用第二调节系数将刀具沿X轴和Y轴的移动速度调节至对应值;所述第二调节方式满足使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值小于等于第二预设高度差值且大于所述第一预设高度差值;
第三调节方式为所述调节模块使用第三调节系数将刀具沿X轴和Y轴的移动速度调节至对应值;所述第三调节方式满足使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值大于所述第二预设高度差值;
所述第二预设条件为所述调节模块使用对应的高度调节系数将刀具单次下降的高度△Z降低至对应高度。
进一步地,所述判定模块在第三预设条件下根据所述使用者预设的加工件的尺寸与所述视觉检测模块获取的加工中心加工完毕后的加工件的尺寸进行比对以分别获取加工件在X轴上的累计尺寸差△x,加工件在Y轴上的累计尺寸差△y,加工件在Z轴上的累计尺寸差△z,判定模块根据使用者预设的加工件的尺寸与所述视觉检测模块获取的加工中心加工完毕后的加工件的尺寸的比对结果确定加工件是否符合预设尺寸的尺寸判定方式,其中:
第一尺寸判定方式为所述判定模块判定加工件的尺寸符合预设标准;所述第一尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R的绝对值小于等于第一预设尺寸误差;
第二尺寸判定方式为所述判定模块判定加工件的尺寸不符合预设标准,并根据第二尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R将刀具的转速调节至对应值;所述第二尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R的绝对值小于等于第二预设尺寸误差且大于所述第一预设尺寸误差;
第三尺寸判定方式为所述判定模块判定加工件的尺寸不符合预设标准,并发出针对编程失误的警报;所述第三尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R的绝对值大于所述第二预设尺寸误差;
所述第三预设条件为加工中心将加工件加工完毕。
进一步地,所述调节模块在第二尺寸判定方式下根据加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R确定刀具的旋转速率的速率调节方式,其中:
第一速率调节方式为所述调节模块使用第一速率调节系数将刀具的旋转速率的速率降低至对应值;所述第一速率调节方式满足加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和小于等于第一预设累计差;
第二速率调节方式为所述调节模块使用第二速率调节系数将刀具的旋转速率的速率增加至对应值;所述第二速率调节方式满足加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和小于等于第二预设累计差且大于所述第一预设累计差;
第三速率调节方式为所述调节模块使用第一速率调节系数将刀具的旋转速率的速率降低至对应值;所述第三速率调节方式满足加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和大于所述第二预设累计差。
与现有技术相比,本发明的有益效果在于,包括,加工中心、比对模块,以及,用以根据所述刀具在不同高度下的实际运行轨迹与对应的预设运行轨迹的重合度判定该刀具在该高度下的运行状况是否符合预设标准,所述判定模块在初步判定所述刀具在单个高度下的运行状况不符合标准时根据所述实际运行轨迹的轮廓与所述运行轨迹的轮廓的平行度对该刀具在该高度下运行状况不符合标准的原因进行进一步判定的判定模块,以及,根据判定模块的判定结果重新选取对应硬度的刀具,以及,将刀具在加工过程中的转速、移动速度或单次下降的高度调节至对应值的调节模块,加工中心定位保护系统对加工过程中的加工件进行监控,并根据加工件的硬度对刀具的硬度进行选定,进一步提高了加工件加工的精度。
进一步地,针对单一高度下的单一平面根据使用者编程信息获取的预设轨迹曲线与实际轨迹曲线进行比对以确定加工中心的运行状态是否符合预设标准,在加工中心对加工件加工的过程中对加工件进行检测以实时获取加工件的加工情况在加工件的加工不符合预设标准时可及时对加工中心进行调节,进一步地提高了加工件加工的精度。
进一步地,在判定重合度过低的条件下根据平行度确定加工中心的运行参数不符合预设标准的具体原因,在平行度大于第二预设平行度时则判定虽然对加工件的加工精度不符合预设标准但加工中心对其加工的趋势符合预设标准,其原因为加工件的加工材料过硬而导致加工轨迹即实际轨迹曲线出现偏差,在确保对加工中的加工件进行检测的同时,进一步提高了加工件加工的精度。
进一步地,在第二判定方式下即判定模块判定刀具出现故障的情况下检测刀具的振动频率以计算刀具针对单个加工件的加工材料的刀具评价值,在确保针对不同材料的加工件选用对应的符合该材料的的刀具即符合还材料的刀具及刀具评价值大于等于预设标准刀具评价值;在确保准确的选用可替换刀具的同时,进一步地提高了加工件加工的精度。
进一步地,当前刀具不符合预设标准的条件下,将当前刀具替换为对应硬度的刀具,选用大于调节后的硬且硬度最接近调节后的硬度的替换刀具作为加工刀具,确保加工件的精度符合标准的同时选用最适宜的锋利度对应的刀具,在避免刀具资源的浪费的同时,进一步提高了加工件加工的精度。
进一步地,在因材料过硬而致使加工件的精度不符合预设条件的情况下即为第三二次判定方式下将刀具的移动速度降低以对加工件进行充分打磨使加工件的精度符合预设标准。
进一步地,针对加工件侧表面过于粗糙的情况将刀具单次下降的高度降低以提升刀具对加工件的加工精度。
进一步地,针对调节后的△Z对刀具沿X轴和Y轴的移动速度进行同步调节,以将刀具的运行轨迹进行协调确保调节后的运行轨迹可精准加工出符合预设标准的加工件。
进一步地,针对加工完毕的加工件进行检测以对加工后的加工件的尺寸是否符合预设标准进行判定;在判定加工件的尺寸不符合预设标准时且尺寸误差在预设范围内,调节模块将刀具的旋转速率进行调节以对加工件的尺寸进行微调,进一步的提高了加工件的加工精度。
附图说明
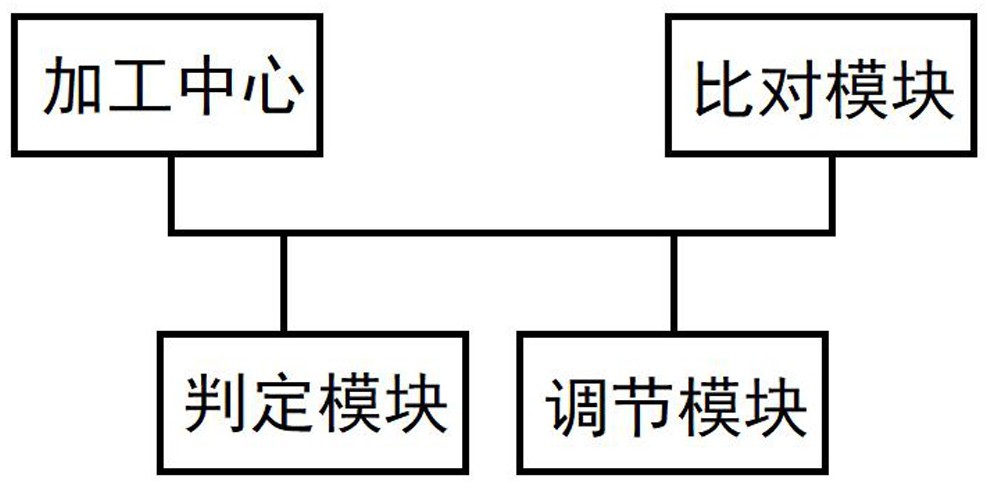
图1为本发明实施例所述带视觉装置的加工中心运动定位保护系统的结构框图;
图2为本发明实施例所述判定模块根据单个高度下的实际运行轨迹与对应的预设运行轨迹的重合度确定加工中心的运行状态是否符合预设标准的流程图;
图3为本发明实施例所述判定模块根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度确定加工中心的运行状态是否符合预设标准的流程图;
图4本发明实施例所述根据加工件侧壁的粗糙度确定刀具单次下降的高度△Z的高度调节方式的流程图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
请参阅图1、图2、图3和图4所示,其分别为本发明实施例所述带视觉装置的加工中心运动定位保护系统的模块框图、判定模块根据单个高度下的实际运行轨迹与对应的预设运行轨迹的重合度确定加工中心的运行状态是否符合预设标准的流程图、判定模块根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度确定加工中心的运行状态是否符合预设标准的流程图、根据加工件侧壁的粗糙度确定刀具单次下降的高度△Z的高度调节方式的流程图;本发明实施例一种带视觉装置的加工中心运动定位保护系统,包括:
加工中心,其内部设有若干种类刀具且加工中心针对各种类的刀具均设有若干不同硬度的替换刀具,加工中心内还设有用以获取加工件尺寸及刀具振动频率的视觉检测模块以及用以获取加工件表面粗糙度的粗糙度测量仪;
比对模块,其与所述加工中心中的对应部件相连,用以分别将所述视觉检测模块获取的所述刀具在不同高度的实际运行轨迹与对应的预设运行轨迹进行比对以分别确定该刀具在不同高度下的实际运行轨迹与对应的预设运行轨迹的重合度;所述比对模块在所述加工中心选用单个所述刀具时以该刀具所处的初始点位为原点建立空间直角坐标系,并根据使用者设置的编程信息中刀具运行过程中在不同垂直坐标下的运行轨迹获取该刀具在本次加工过程中不同高度下的预设运行轨迹;
判定模块,其与所述比对模块相连,用以根据所述刀具在不同高度下的实际运行轨迹与对应的预设运行轨迹的重合度判定该刀具在该高度下的运行状况是否符合预设标准;所述判定模块在初步判定所述刀具在单个高度下的运行状况不符合标准时根据所述实际运行轨迹的轮廓与所述运行轨迹的轮廓的平行度对该刀具在该高度下运行状况不符合标准的原因进行进一步判定;
调节模块,其分别与所述加工中心、所述比对模块和所述判定模块的对应部件相连,用以根据判定模块的判定结果重新选取对应硬度的刀具,以及,将刀具在加工过程中的转速、移动速度或单次下降的高度调节至对应值。
具体而言,所述判定模块根据使用者设置的编程信息获取不同高度对应的刀具的预设轨迹曲线,针对单一高度比对模块将所述视觉检测模块获取的刀具运行的实际轨迹的曲线与预设轨迹的曲线重合比对以获取轨迹曲线重合的长度占预设轨迹的曲线长度的比重以确定刀具运行的实际轨迹曲线与预设轨迹曲线的重合度;所述判定模块根据单个高度下的实际运行轨迹与对应的预设运行轨迹的重合度确定加工中心的运行状态是否符合预设标准的判定方式,其中:
第一判定方式为所述判定模块判定所述加工中心的运行状况不符合预设标准,并发出针对加工中心异常的警报;所述第一判定方式满足该高度下的实际运行轨迹与对应的预设运行轨迹的重合度小于等于第一预设重合度;
第二判定方式为所述判定模块初步判定加工中心的运行参数不符合预设标准,根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度对加工中心的运行状态进行二次判定;所述第二判定方式满足该高度下的实际运行轨迹与对应的预设运行轨迹的重合度小于等于第二预设重合度且大于所述第一预设重合度;
第三判定方式为所述判定模块判定加工中心的运行参数符合预设标准,并控制加工中心以当前运行参数运行;所述第三判定方式满足该高度下的实际运行轨迹与对应的预设运行轨迹的重合度大于等于所述第二预设重合度。
具体而言,所述判定模块在所述第二判定方式下所述比对模块将预设轨迹的曲线与实际轨迹的曲线进行比对以获取平行的曲线的长度占实际轨迹的曲线的总长度的比重以获得刀具运行的实际轨迹曲线与预设轨迹曲线的平行度;
所述判定模块根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度确定加工中心的运行状态是否符合预设标准的二次判定方式,其中:
第一二次判定方式为所述判定模块判定加工中心的运行状态不符合预设标准,并控制加工中心终止运行;所述第一二次判定方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度小于等于预设第一预设平行度;
第二二次判定方式为所述判定模块判定所述加工中心的运行状态不符合预设标准,并根据计算的刀具评价值选定对应的替换刀具作为加工刀具;所述第二二次判定方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度小于等于第二预设平行度且大于所述第一预设平行度;
第三二次判定方式为所述判定模块判定所述加工中心的运行状态不符合预设标准,并根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值将所述刀具的移动速度降低至对应值;所述第三二次判定方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度大于所述第二预设平行度。
具体而言,所述判定模块在第所述第二二次判定方式下计算刀具评价值K,设定刀具评价值的计算公式为
具体而言,所述调节模块根据当前刀具评价值与预设标准刀具评价值的差值选定当前刀具的替换刀具中的对应硬度的替换刀具作为加工刀具的刀具选定方式,其中:
第一刀具选定方式为所述调节模块使用第一硬度调节系数将判定模块中预设的当前刀具的硬度调节至对应值,并根据调节后的硬度选定对应的替换刀具作为加工刀具;所述第一刀具选定方式满足当前刀具评价值与预设标准刀具评价值的差值小于等于第一预设差值;
第二刀具选定方式为所述调节模块使用第二硬度调节系数将判定模块中预设的当前刀具的硬度调节至对应值,并根据调节后的硬度选定对应的替换刀具作为加工刀具;所述第二刀具选定方式满足当前刀具评价值与预设标准刀具评价值的差值小于等于第二预设差值且大于所述第一预设差值;
第三刀具选定方式为所述调节模块使用第三硬度调节系数将判定模块中预设的当前刀具的硬度调节至对应值,并根据调节后的硬度选定对应的替换刀具作为加工刀具;所述第三刀具选定方式满足当前刀具评价值与预设标准刀具评价值的差值大于所述第二预设差值。
具体而言,所述调节模块在所述第三二次判定方式下根据所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值确定所述刀具的移动速度的速度调节方式,其中:
第一速度调节方式为所述调节模块使用第一速度调节系数将所述刀具的移动速度降低至第一速度;所述第一速度调节方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值小于等于第一预设平行度差值;
第二速度调节方式为所述调节模块使用第二速度调节系数将所述刀具的移动速度降低至第二速度;所述第二速度调节方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值小于等于第二预设平行度差值且大于所述第一预设平行度差值;
第三速度调节方式为所述调节模块使用第三速度调节系数将所述刀具的移动速度降低至第三速度;所述第三速度调节方式满足所述实际运行轨迹的曲线与所述预设运行轨迹的曲线的平行度与第二预设平行度的差值大于所述第二预设平行度差值。
具体而言,所述调节模块在第一预设条件下根据所述粗糙度测量仪获取的加工件侧壁的粗糙度确定刀具单次下降的高度△Z的高度调节方式,其中:
第一高度调节方式为所述调节模块使用当前刀具单次下降的高度△Z作为刀具单次下降的高度;所述第一高度调节方式满足加工件侧壁的粗糙度小等于第一预设粗糙度;
第二高度调节方式为所述调节模块使用第一预设高度调节系数将刀具单次下降的高度△Z降低至第一高度Z1;所述第二高度调节方式满足加工件侧壁的粗糙度小等于第二预设粗糙度且大于所述第一预设高度;
第三高度调节方式为所述调节模块使用第二预设高度调节系数将刀具单次下降的高度△Z降低至第二高度;所述第三高度调节方式满足加工件侧壁的粗糙度大于所述第二预设高度Z2;
所述第一预设条件为所述判定模块判定加工中心运行预设时长。
具体而言,所述调节模块在第二预设条件下根据使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值确定刀具沿X轴和Y轴的移动速度的调节方式,其中:
第一调节方式为所述调节模块使用第一调节系数将刀具沿X轴和Y轴的移动速度调节至对应值;所述第一调节方式满足使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值小于等于第一预设高度差值;
第二调节方式为所述调节模块使用第二调节系数将刀具沿X轴和Y轴的移动速度调节至对应值;所述第二调节方式满足使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值小于等于第二预设高度差值且大于所述第一预设高度差值;
第三调节方式为所述调节模块使用第三调节系数将刀具沿X轴和Y轴的移动速度调节至对应值;所述第三调节方式满足使用对应的高度调节系数将刀具单次下降的高度△Z调节后的对应高度与调节前的刀具单次下降的高度的差值大于所述第二预设高度差值;
所述第二预设条件为所述调节模块使用对应的高度调节系数将刀具单次下降的高度△Z降低至对应高度。
具体而言,所述判定模块在第三预设条件下根据所述使用者预设的加工件的尺寸与所述视觉检测模块获取的加工中心加工完毕后的加工件的尺寸进行比对以分别获取加工件在X轴上的累计尺寸差△x,加工件在Y轴上的累计尺寸差△y,加工件在Z轴上的累计尺寸差△z,判定模块根据使用者预设的加工件的尺寸与所述视觉检测模块获取的加工中心加工完毕后的加工件的尺寸的比对结果确定加工件是否符合预设尺寸的尺寸判定方式,其中:
第一尺寸判定方式为所述判定模块判定加工件的尺寸符合预设标准;所述第一尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R的绝对值小于等于第一预设尺寸误差;
第二尺寸判定方式为所述判定模块判定加工件的尺寸不符合预设标准,并根据第二尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R将刀具的转速调节至对应值;所述第二尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R的绝对值小于等于第二预设尺寸误差且大于所述第一预设尺寸误差;
第三尺寸判定方式为所述判定模块判定加工件的尺寸不符合预设标准,并发出针对编程失误的警报;所述第三尺寸判定方式满足所述加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R的绝对值大于所述第二预设尺寸误差;
所述第三预设条件为加工中心将加工件加工完毕。
具体而言,所述调节模块在第二尺寸判定方式下根据加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和R确定刀具的旋转速率的速率调节方式,其中:
第一速率调节方式为所述调节模块使用第一速率调节系数将刀具的旋转速率的速率降低至对应值;所述第一速率调节方式满足加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和小于等于第一预设累计差;
第二速率调节方式为所述调节模块使用第二速率调节系数将刀具的旋转速率的速率增加至对应值;所述第二速率调节方式满足加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和小于等于第二预设累计差且大于所述第一预设累计差;
第三速率调节方式为所述调节模块使用第一速率调节系数将刀具的旋转速率的速率降低至对应值;所述第三速率调节方式满足加工件在X轴上的累计尺寸差△x、在Y轴上的累计尺寸差△y与在Z轴上的累计尺寸差△z的和大于所述第二预设累计差。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。 凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种蜂窝二次加工定位装置及定位方法
- 一种带视觉装置的加工中心运动定位数控系统及方法
- 一种带视觉装置的加工中心运动定位数控系统及方法