用于飞行器的升降系统
文献发布时间:2024-01-17 01:18:42
技术领域
本公开总体上涉及一种升降系统,并且更具体地涉及一种用于飞行器厨房推车的升降系统。
背景技术
一些商用飞行器包括用于储存和准备乘客食物的厨房。厨房通常包括用于厨房推车的储存空间,其又包含食物托盘、饮料等。对于要供应两餐或三餐的长途飞行,需要大的厨房来容纳储存大量食物和废物所需的厨房推车。这些大的厨房占用了本来可以用于乘客座椅的空间。这减少了航空公司的收入量。因此,需要一种商用飞行器厨房系统,其中厨房推车可以被有效地收纳和取用。
发明内容
本公开的一个方面是一种用于飞行器的升降系统,所述升降系统包括:第一厨房推车;第二厨房推车;地板;框架,所述框架限定了堆叠的第一储存区、第二储存区和第三储存区,其中所述第一储存区的底端与所述地板对准,所述第二储存区的顶端与所述地板对准,并且所述第三储存区的底端与所述第一储存区的顶端对准;第一升降机,所述第一升降机被配置为将所述第一厨房推车从所述第一储存区移动到所述第二储存区;以及第二升降机,所述第二升降机被配置为将所述第二厨房推车从所述第一储存区移动到所述第三储存区。
本公开的另一方面是一种用于飞行器的升降系统,所述升降系统包括:第一厨房推车;第二厨房推车;地板;框架,所述框架限定了堆叠的第一储存区、第二储存区和第三储存区,其中所述第一储存区的底端与所述地板对准,所述第二储存区的顶端与所述地板对准,并且所述第三储存区的底端与所述第一储存区的顶端对准;第一升降机,所述第一升降机被配置为将所述第一厨房推车从所述第一储存区移动到所述第二储存区,所述第一升降机包括第一托盘,所述第一托盘被配置为当所述第一托盘在所述第二储存区内时支撑被定位在所述第一储存区中的第三厨房推车;第二升降机,所述第二升降机被配置为将所述第二厨房推车从所述第一储存区移动到所述第三储存区,所述第二升降机包括第二托盘;以及控制系统,所述控制系统被配置为防止所述第一托盘与所述第二托盘之间的碰撞。
本公开的另一方面是一种用于将升降系统安装在飞行器中的方法,该方法包括:将框架附接到飞行器的地板,使得框架限定了堆叠的第一储存区、第二储存区和第三储存区,其中第一储存区的底端与地板对准,第二储存区的顶端与地板对准,并且第三储存区的底端与第一储存区的顶端对准;在框架内安装第一升降机,该第一升降机被配置为将第一厨房推车从第一储存区移动到第二储存区;以及在框架内安装第二升降机,该第二升降机被配置为将第二厨房推车从第一储存区移动到第三储存区。
通过参考本文所述的量或测量值,术语“约”或“基本上”意味着所列举的特性、参数或值不需要精确地实现,而是偏差或变化(包括例如公差、测量误差、测量精度限制和本领域技术人员已知的其它因素)可以以不排除该特性旨在提供的效果的量发生。
已经讨论的特征、功能和优点可以在各种示例中独立地实现,或者可以在其它示例中组合,其进一步的细节可以参考以下描述和附图来看到。
附图说明
在所附权利要求中阐述了被认为是说明性示例的特性的新颖特征。然而,当结合附图阅读时,将通过参考本公开的说明性示例的以下详细描述来最佳地理解说明性示例以及优选使用模式、进一步目标及其描述。
图1是根据示例的飞行器的透视图。
图2是根据示例的升降系统的框图。
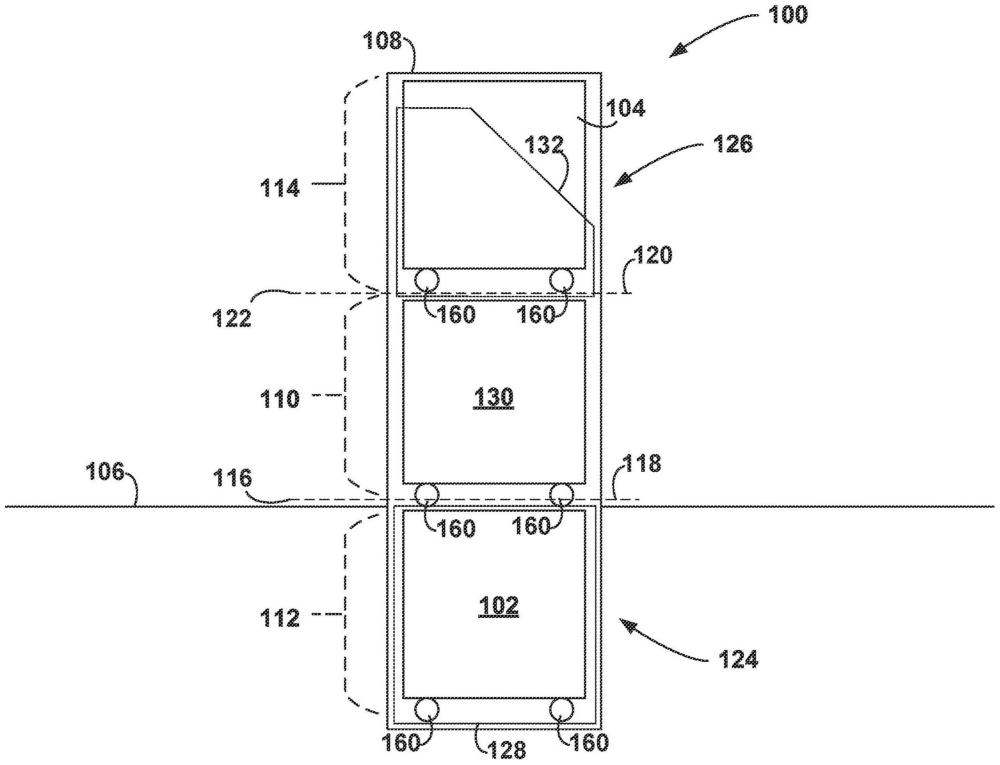
图3是根据示例的升降系统的示意图。
图4A是根据示例的升降系统的前透视图。
图4B是根据示例的升降系统的后透视图。
图5A是根据示例的升降系统的后视图。
图5B是根据示例的升降系统的底端的特写后视图。
图5C是根据示例的升降系统的顶端的特写后视图。
图6A是根据示例的托盘的前透视图。
图6B是根据示例的托盘的后透视图。
图6C是根据示例的托盘的前透视图。
图7是根据示例的升降系统的横截面图。
图8A是根据示例的升降系统的前透视图。
图8B是根据示例的升降系统的后透视图。
图9是根据示例的升降系统的后特写视图。
图10A是根据示例的升降系统的前透视图。
图10B是根据示例的升降系统的后透视图。
图11A是根据示例的托盘的前透视图。
图11B是根据示例的托盘的特写前视图。
图11C是根据示例的托盘的后透视图。
图12是根据示例的与升降系统相关的功能的示意图。
图13是根据示例的方法的框图。
图14是根据示例的方法的框图。
具体实施方式
如上所述,需要一种商用飞行器厨房系统,其中厨房推车被有效地收纳和取用。本文的示例包括用于飞行器的升降系统和用于将升降系统安装在飞行器中的方法。升降系统包括第一厨房推车(例如,在轮子上)、第二厨房推车、地板(floor deck)和框架(例如,限定轴的框架)。框架限定了(例如,竖直地)堆叠的第一储存区(例如,中间区)、第二储存区(例如,下部区)和第三储存区(例如,上部区)。第一储存区的底端(例如,竖直地)与地板对准,第二储存区的顶端(例如,竖直地)与地板对准,并且第三储存区的底端(例如,竖直地)与第一储存区的顶端对准。所述升降系统还包括第一升降机(例如,第一提升机)和第二升降机(例如,第二提升机),所述第一升降机被配置为将所述第一厨房推车从所述第一储存区移动到所述第二储存区,所述第二升降机被配置为将所述第二厨房推车从所述第一储存区移动到所述第三储存区。因此,两个厨房推车可以存放在地板上方的框架内,并且另一个厨房推车可以存放在地板下方的框架内。根据需要,多个升降系统可以布置成一行。
完全装载升降系统可以涉及将第一厨房推车移动到框架中使得第一厨房推车被定位在第一储存区内、经由第一升降机将第一厨房推车从第一储存区移动到第二储存区、将第二厨房推车移动到框架中使得第二厨房推车被定位在第一储存区内、经由第二升降机将第二厨房推车从第一储存区移动到第三储存区、以及将第三厨房推车移动到第一储存区中并位于第一厨房推车和第二厨房推车之间。当与先前的系统相比时,升降系统通常可以更有效地存储厨房推车,这释放了用于额外的乘客座椅的空间和产生的收入的增加。
现在将在下文中参考附图更全面地描述所公开的示例,在附图中示出了所公开的示例中的一些而非全部。实际上,可描述若干不同实例且不应将其解释为限于本文中所阐述的实例。相反,描述这些示例,使得本公开内容将是透彻和完整的,并且将向本领域技术人员充分传达本公开内容的范围。
图1是飞行器10的透视图,飞行器10包括机头11、机翼20a、机翼20b、机身25、尾翼13和升降系统100。飞行器10包括被布置用于在飞行期间储存物品的许多区域。在一个示例中,机身25包括在用于储存行李和其它物品或用品的客舱下方的储存装置。在另一示例中,机身25中的客舱包括头顶箱和用于储存其它物品的座椅下方区域。
飞行器10被示出为商用客机,但是其它示例也是可能的。在图1中,升降系统100位于飞行器10的前端附近(例如,在厨房区域内),然而这不是必需的。
图2是升降系统100的框图。升降系统100包括第一厨房推车102、第二厨房推车104、第三厨房推车130、地板106和框架108,框架108限定了(例如,竖直地)堆叠的第一储存区110、第二储存区112和第三储存区114。第一储存区110的底端116(例如,竖直地)与地板106对准,第二储存区112的顶端118(例如,竖直地)与地板106对准,并且第三储存区114的底端120(例如,竖直地)与第一储存区110的顶端122对准。升降系统100还包括第一升降机124和第二升降机126,第一升降机124被配置为将第一厨房推车102从第一储存区110移动到第二储存区112,第二升降机126被配置为将第二厨房推车104从第一储存区110移动到第三储存区114。
在一些示例中,第一厨房推车102、第二厨房推车104和第三厨房推车130都具有基本上相同的尺寸或完全相同的尺寸。在其它示例中,第一厨房推车102、第二厨房推车104和第三厨房推车130具有不同的尺寸。第一厨房推车102、第二厨房推车104和第三厨房推车130均是被配置为在飞行器10上储存食物、饮料和/或废物的储存单元(例如,在轮子上)。
地板106通常是被配置为在飞行期间支撑乘客和座椅的地板表面。地板106由地板梁168和地板梁170支撑。例如,地板梁168和地板梁170可以由金属形成。
框架108可以由如下所示的角铁(例如,金属)和紧固件构成,但是其它示例也是可能的。升降系统100还包括框架154,框架154包括框架108的一个或多个(例如,全部)特征。也就是说,升降系统100可以包括许多框架,每个框架限定三个储存区,如框架108和框架154。
第一升降机124包括托盘128、螺母134、螺旋起重器136、马达138和辊140。
第二升降机126包括托盘132、螺母144、螺旋起重器146、马达148、螺母164和螺旋起重器166。
升降系统100还包括控制系统150、冷却系统152和冷却系统155。控制系统150通常包括计算设备、布尔逻辑、硬件、软件和/或传感器(例如,接近传感器),其被配置为防止托盘128与托盘132之间的碰撞。冷却系统152是制冷系统,其被配置为当第一厨房推车102和第二厨房推车104在框架108内时冷却第一厨房推车102和第二厨房推车104的内容物。冷却系统155是制冷系统,其被配置为冷却在框架154内的一个或多个厨房推车的内容物。
图3是升降系统100的示意图。升降系统100包括第一厨房推车102、第二厨房推车104、第三厨房推车130、地板106和框架108,框架108限定了(例如,竖直地)堆叠的第一储存区110、第二储存区112和第三储存区114。第一储存区110的底端116(例如,竖直地)与地板106对准,第二储存区112的顶端118(例如,竖直地)与地板106对准,并且第三储存区114的底端120(例如,竖直地)与第一储存区110的顶端122对准。第一升降机124被配置为将第一厨房推车102从第一储存区110(例如,在地板106上)移动到第二储存区112(例如,在地板106下方)。第二升降机126被配置为将第二厨房推车104从第一储存区110移动到第三储存区114(例如,在地板106上方)。
在该示例中,第一厨房推车102、第二厨房推车104和第三厨房推车130的尺寸基本上相等,然而,在下面描述的其它示例中并非如此。第一厨房推车102、第二厨房推车104和第三厨房推车130均包括一个或多个轮160。
如图所示,当第一厨房推车102在第二储存区112中并且第二厨房推车104在第三储存区114中时,第三厨房推车130可以定位在第一储存区110中。例如,当第三厨房推车130在第一储存区110中并且托盘128在第二储存区112中时,第一升降机124的托盘128支撑第三厨房推车130。
第二升降机126包括托盘132,托盘132被配置为当第三厨房推车130被定位在第一储存区110中并且第一厨房推车102被定位在第二储存区112中时将第二厨房推车104容纳在第三储存区114中。
在示例中,安装者可以将框架108附接(例如,使用紧固件紧固)到飞行器10的地板106(例如,紧固到地板梁168、地板梁170和地板106),使得框架108限定了(例如,竖直地)堆叠的第一储存区110、第二储存区112和第三储存区114,并且使得第一储存区110的底端116(例如,竖直地)与地板106对准,第二储存区112的顶端118(例如,竖直地)与地板106对准,并且第三储存区114的底端120(例如,竖直地)与第一储存区110的顶端122对准。安装者还可以在框架108内安装第一升降机124,第一升降机124被配置为将第一厨房推车102从第一储存区110移动到第二储存区112并且在框架108内安装第二升降机126,第二升降机126被配置为将第二厨房推车104从第一储存区110移动到第三储存区114。
图4A是升降系统100的前透视图,示出了框架108的第一侧172和框架108的第二侧174。如图所示,第一厨房推车102被配置为紧密地配合在托盘128内,并且第二厨房推车104被配置为紧密地配合在托盘132内。托盘128和托盘132均通常由金属或塑料形成,并且在水平维度上比框架108略窄,以允许在框架108内移动。
还示出了在框架108顶上的冷却系统152的冷却器部分。例如,冷却器可以包括压缩机和冷凝器。
图4B是升降系统100的后透视图。升降系统100包括地板梁168和地板梁170。框架108的第一侧172邻接地板梁168,并且框架108的与第一侧172相对的第二侧174邻接地板梁170。如图所示,地板106由地板梁168和地板梁170支撑(例如,紧固到地板梁168和地板梁170)。
还示出了在框架108后面的冷却系统152的管道部分。管道部分可以被配置为携带来自冷却器的冷空气并且被配置为同时联接到第一厨房推车102、第二厨房推车104和第三厨房推车130中的一者或多者。
图5A是升降系统100的后视图,示出了地板106、第一储存区110、第二储存区112和第三储存区114。如图所示,马达138和马达148都位于框架108的顶端附近。螺旋起重器136和螺旋起重器146都从第三储存区114到第二储存区112几乎跨越框架108的整个高度。
图5B是升降系统100的底端的特写后视图,示出了框架108、托盘128、螺旋起重器136、螺母134和辊140。螺母134附接到托盘128(例如,经由支架),螺旋起重器136(例如,螺纹杆)与螺母134螺纹接合,并且马达138(在图5A和图5C中示出)被配置为旋转螺旋起重器136以在第一储存区110和第二储存区112之间在框架108内移动托盘128。
辊140被配置为经由辊140与框架108的接合而在框架108内引导托盘128。若干辊140能够以这种方式接合框架108的表面,以引导托盘128在框架108内的移动。辊140包括可旋转地附接到联接到托盘128的一个或多个轴的一个或多个轮。
图5C是升降系统100的顶端的特写后视图。第二升降机126包括托盘132、附接到托盘132的螺母144、与螺母144螺纹接合的螺旋起重器146、以及被配置为旋转螺旋起重器146以在第一储存区110和第三储存区114之间在框架108内移动托盘132的马达148。第二升降机126还包括一个或多个辊140,其接合框架108的表面以引导托盘132在框架108内的移动。辊140包括可旋转地附接到联接到托盘132的一个或多个轴的一个或多个轮。
图6A是托盘128的前透视图。托盘128包括在托盘128的上表面158上的沟道156。沟道156被配置为接收第三厨房推车130的轮160(参见图3)。托盘128还包括在内底表面159上的沟道156,用于接收第一厨房推车102的轮160(参见图3)。
图6B是托盘128的后透视图,示出了上表面158上的沟道156和辊140。
图6C是托盘132的前透视图。托盘132包括在内底表面161上的沟道156,用于接收第二厨房推车104的轮160(参见图3)。
图7是升降系统100和机身125的横截面图。在图7中,第二厨房推车104在水平方向162(例如,内侧/外侧)上比第一厨房推车102和第三厨房推车130两者更小(例如,更窄)。因此,第三储存区114在水平方向162上比第一储存区110和第二储存区112窄,并且在水平方向162上,托盘132比托盘128窄。在某些较小的飞行器中,使第二厨房推车104和第三储存区114在水平方向162上比它们的对应物更小可能是有用的。
图8A是图7中所示的升降系统100的前透视图,示出了框架108的第一侧172和框架108的第二侧174。如图所示,第一厨房推车102被配置为紧密地配合在托盘128内,并且第二厨房推车104被配置为紧密地配合在托盘132内。托盘128和托盘132均通常由金属或塑料形成。托盘128在水平维度上比第一储存区110和第二储存区112略窄,以允许在框架108内移动。托盘132在水平维度上比第三储存区114略窄,以允许在框架108内移动。
图8B是图7中所示的升降系统100的后透视图。升降系统100包括地板梁168和地板梁170。框架108的第一侧172邻接地板梁168,并且框架108的与第一侧172相对的第二侧174邻接地板梁170。如图所示,地板106由地板梁168和地板梁170支撑(例如,紧固到地板梁168和地板梁170)。
图9是图7中所示的升降系统100的第一储存区110和第二储存区112的后特写视图。第一升降机124包括附接到托盘128的螺母134(例如,经由支架)、与螺母134螺纹接合的螺旋起重器136、以及马达138,马达138被配置为旋转螺旋起重器136以在第一储存区110和第二储存区112之间在框架108内移动托盘128。
马达138位于第一储存区110的顶端。螺旋起重器136从第一储存区110的顶端延伸到第二储存区112的底端。
图10A是图7中所示的升降系统100的前透视图。更具体地,图10A示出了第一储存区110和第三储存区114。第二升降机126包括附接到托盘132的螺母144、与螺母144相对地附接到托盘132的螺母164(在图11A至图11C中示出)、与螺母144螺纹接合的螺旋起重器146、与螺母164螺纹接合且与螺旋起重器146相对的螺旋起重器166、以及马达148,马达148被配置为旋转螺旋起重器146(例如,经由带)和螺旋起重器166(例如,经由带)以在第一储存区110和第三储存区114之间在框架108内移动托盘132。
图10B是升降系统100的附加示例的后透视图。在图10B中,第二升降机126被配置为经由一个或多个滑轮180而不是经由如上所述的螺钉起重器和螺母来移动托盘132。在该示例中,马达148采用绞盘的形式,该绞盘卷绕或展开缆线181,缆线181延伸穿过一个或多个滑轮180并且在缆线181的相对端处锚固到托盘132。
图11A是图7中所示的托盘132的前透视图,示出了螺母144、沟道156和辊140。
图11B是图7中所示的托盘132的特写前视图,示出了螺母144、螺母164和辊140。
图11C是图7中所示的托盘132的后透视图,示出了辊140。在图11C中,螺母144和螺母164未示出。
图12是与图3中所示的升降系统100相关的功能的示意图。图12的左上板块描绘(例如,空中乘务员)将第一厨房推车102移动(例如,滚动)到框架108中,使得第一厨房推车102定位在第一储存区110内。
图12的上中心板块描绘了经由第一升降机124(例如,托盘128)将第一厨房推车102从第一储存区110移动到第二储存区112。
图12的右上板块和左下板块描绘(例如,飞行乘务员)将第二厨房推车104移动到框架108中(例如,移动到托盘132上),使得第二厨房推车104定位在第一储存区110内。
图12的下中心板块和右下板块描绘了经由第二升降机126(例如,经由托盘132)将第二厨房推车104从第一储存区110移动到第三储存区114并且(例如,飞行乘务员)将第三厨房推车130移动到第一储存区110中并位于第一厨房推车102和第二厨房推车104之间。
当装载时,第一升降机124可以在第二升降机126将第二厨房推车104升高到第三储存区114中之前或之后将第一厨房推车102降低到第二储存区112中。类似地,当卸载时,第一升降机124可以在第二升降机126将第二厨房推车104从第三储存区114降低到第一储存区110之前或之后将第一厨房推车102从第二储存区112升高到第一储存区110。
当装载时,在第一厨房推车102已经移动到第二储存区112之后并且在第二厨房推车104已经移动到第三储存区114之后,第三厨房推车130通常移动到第一储存区110中。当卸载时,在第二厨房推车104从第三储存区114降低到第一储存区110之前并且在第一厨房推车102从第二储存区112升高到第一储存区110之前,第三厨房推车130通常被从第一储存区110移除。
图7中所示的升降系统100的部件可以执行类似于如上所述的图3的升降系统100的对应部件的功能。
图13和图14是用于安装升降系统的方法300和方法350的框图。如图13和图14所示,方法300和方法350包括如框302、304、306、308、310、312、314和316所示的一个或多个操作、功能或动作。尽管以顺序的次序示出了框,但是这些框也可以并行地和/或以与本文描述的顺序不同的顺序执行。此外,各个框可以被组合成更少的框、被划分为附加的框、和/或基于期望的实现方式被移除。
在框302处,方法300包括将框架108附接到飞行器10的地板106,使得框架108限定了(例如,竖直地)堆叠的第一储存区110、第二储存区112和第三储存区114,并且使得第一储存区110的底端116(例如,竖直地)与地板106对准,第二储存区112的顶端118(例如,竖直地)与地板106对准,并且第三储存区114的底端120(例如,竖直地)与第一储存区110的顶端122对准。以上参考图3描述了该功能。
在框304处,方法300包括在框架108内安装第一升降机124,第一升降机124被配置为将第一厨房推车102从第一储存区110移动到第二储存区112。以上参考图3描述了该功能。
在框306处,方法300包括在框架108内安装第二升降机126,该第二升降机126被配置为将第二厨房推车104从第一储存区110移动到第三储存区114。以上参考图3描述了该功能。
在框308处,方法350包括将第一厨房推车102移动到框架108中,使得第一厨房推车102定位在第一储存区110内。以上参考图12描述了该功能。
在框310处,方法350包括经由第一升降机124将第一厨房推车102从第一储存区110移动到第二储存区112。以上参考图12描述了该功能。
在框312处,方法350包括将第二厨房推车104移动到框架108中,使得第二厨房推车104定位在第一储存区110内。以上参考图12描述了该功能。
在框314处,方法350包括经由第二升降机126将第二厨房推车104从第一储存区110移动到第三储存区114。以上参考图12描述了该功能。
在框316处,方法350包括将第三厨房推车130移动到第一储存区110中并位于第一厨房推车102和第二厨房推车104之间。以上参考图12描述了该功能。
因此,本公开的示例可以涉及下面列出的列举的条款(EC)中的一个。
EC1是一种用于飞行器的升降系统,所述升降系统包括:第一厨房推车;第二厨房推车;地板;框架,所述框架限定了堆叠的第一储存区、第二储存区和第三储存区,其中所述第一储存区的底端与所述地板对准,所述第二储存区的顶端与所述地板对准,并且所述第三储存区的底端与所述第一储存区的顶端对准;第一升降机,所述第一升降机被配置为将所述第一厨房推车从所述第一储存区移动到所述第二储存区;以及第二升降机,所述第二升降机被配置为将所述第二厨房推车从所述第一储存区移动到所述第三储存区。
EC2是根据EC1所述的升降系统,其中第一升降机包括托盘,该托盘被配置为当该托盘在第二储存区内时支撑被定位在第一储存区中的第三厨房推车。
EC3是根据EC2所述的升降系统,其中第二升降机包括第二托盘,该第二托盘被配置为当第三厨房推车被定位在第一储存区中并且第一厨房推车被定位在第二储存区中时将第二厨房推车容纳在第三储存区中。
EC4是根据EC1至EC3中任一项所述的升降系统,其中,所述第一升降机包括:托盘;螺母,所述螺母附接到所述托盘;螺旋起重器,所述螺旋起重器与所述螺母螺纹接合;以及马达,所述马达被配置为旋转所述螺旋起重器以在所述第一储存区和所述第二储存区之间在所述框架内移动所述托盘。
EC5是根据EC4所述的升降系统,其中第一升降机包括辊,该辊被配置为经由辊与框架的接合来引导框架内的托盘。
EC6是根据EC4至EC5中任一项所述的升降系统,其中,所述第二升降机包括:第二托盘;第二螺母,所述第二螺母附接到所述第二托盘;第二螺旋起重器,所述第二螺旋起重器与所述第二螺母螺纹接合;以及第二马达,所述第二马达被配置为旋转所述第二螺旋起重器以在所述第一储存区和所述第三储存区之间在所述框架内移动所述第二托盘。
EC7是根据EC1至EC6中任一项所述的升降系统,其中,所述第一升降机包括第一托盘,并且所述第二升降机包括第二托盘,所述升降系统还包括控制系统,所述控制系统被配置为防止所述第一托盘与所述第二托盘之间的碰撞。
EC8是根据EC1至EC7中任一项所述的升降系统,该升降系统还包括冷却系统,所述冷却系统被配置为冷却所述第一厨房推车和所述第二厨房推车的内容物。
EC9是根据EC1至EC8中任一项所述的升降系统,其中,所述框架是第一框架,并且所述升降系统还包括:第二框架;第一冷却系统,所述第一冷却系统被配置为冷却所述第一厨房推车和所述第二厨房推车的内容物;以及第二冷却系统,所述第二冷却系统被配置为冷却位于所述第二框架内的一个或多个厨房推车的内容物。
EC10是根据EC1至EC9中任一项所述的升降系统,其中,所述第一厨房推车和所述第二厨房推车的尺寸基本上相等。
EC11是根据EC1至EC10中任一项所述的升降系统,其中所述第一升降机包括托盘,所述托盘具有在所述托盘的上表面上的沟道,其中所述沟道被配置为接收第三厨房推车的轮。
EC12是根据EC1至EC11中任一项所述的升降系统,其中,所述第三储存区在水平方向上比所述第一储存区窄。
EC13是根据EC12的升降系统,其中第一升降机包括第一托盘,并且第二升降机包括在水平方向上比第一托盘窄的第二托盘。
EC14是根据EC13所述的升降系统,其中第一升降机还包括:第一螺母,其附接至第一托盘;第一螺旋起重器,其与第一螺母螺纹接合;以及第一马达,其被配置为旋转第一螺旋起重器以在第一储存区和第二储存区之间在框架内移动第一托盘,其中第二升降机还包括:第二螺母,其附接至第二托盘;第三螺母,其附接至第二托盘且与第二螺母相对;第二螺旋起重器,其与第二螺母螺纹接合;第三螺旋起重器,其与第三螺母螺纹接合且与第二螺旋起重器相对;以及第二马达,其被配置为旋转第二螺旋起重器和第三螺旋起重器以在框架内在第一储存区和第三储存区之间移动第二托盘。
EC15是根据EC1至EC14中任一项所述的升降系统,其中,所述第二厨房推车在水平方向上比所述第一厨房推车窄。
EC16是根据EC1至EC15中任一项所述的升降系统,该升降系统还包括:第一地板梁;以及第二地板梁,其中,所述框架的第一侧邻接所述第一地板梁,并且所述框架的与所述第一侧相对的第二侧邻接所述第二地板梁。
EC17是根据EC16所述的升降系统,其中地板由第一地板梁和第二地板梁支撑。
EC18是一种用于飞行器的升降系统,所述升降系统包括:第一厨房推车;第二厨房推车;地板;框架,所述框架限定了堆叠的第一储存区、第二储存区和第三储存区,其中所述第一储存区的底端与所述地板对准,所述第二储存区的顶端与所述地板对准,并且所述第三储存区的底端与所述第一储存区的顶端对准;第一升降机,所述第一升降机被配置为将所述第一厨房推车从所述第一储存区移动到所述第二储存区,所述第一升降机包括第一托盘,所述第一托盘被配置为当所述第一托盘在所述第二储存区内时支撑被定位在所述第一储存区中的第三厨房推车;第二升降机,所述第二升降机被配置为将所述第二厨房推车从所述第一储存区移动到所述第三储存区,所述第二升降机包括第二托盘;以及控制系统,所述控制系统被配置为防止所述第一托盘和所述第二托盘之间的碰撞。
EC19是一种用于将升降系统安装在飞行器中的方法,该方法包括:将框架附接到飞行器的地板,使得框架限定了堆叠的第一储存区、第二储存区和第三储存区,其中第一储存区的底端与地板对准,第二储存区的顶端与地板对准,并且第三储存区的底端与第一储存区的顶端对准;在框架内安装第一升降机,该第一升降机被配置为将第一厨房推车从第一储存区移动到第二储存区;以及在框架内安装第二升降机,该第二升降机被配置为将第二厨房推车从第一储存区移动到第三储存区。
EC20是根据EC19所述的方法,该方法还包括:将第一厨房推车移动到框架中,使得第一厨房推车被定位在第一储存区内;经由第一升降机将第一厨房推车从第一储存区移动到第二储存区;将第二厨房推车移动到框架中,使得第二厨房推车被定位在第一储存区内;经由第二升降机将第二厨房推车从第一储存区移动到第三储存区;以及将第三厨房推车移动到第一储存区中且位于第一厨房推车和第二厨房推车之间。
已经出于说明和描述的目的呈现了对不同有利布置的描述,并且不旨在穷举或限于所公开形式的示例。许多修改和变化对于本领域的普通技术人员将是显而易见的。此外,与其它有利示例相比,不同的有利示例可以描述不同的优点。选择并描述所选择的一个或多个示例,以便解释示例的原理、实际应用,并且使本领域的其它普通技术人员能够理解具有适合于所设想的特定用途的各种修改的各种示例的公开。
- 用于控制飞行器能量状态的辅助方法,相关的计算机程序产品和用于控制的辅助系统
- 用于飞行器的推进系统及用于操作其的方法
- 用于飞行器的混合电力推进系统及用于操作涡轮机的方法
- 一种用于在飞行中自主将载荷从第一飞行器转移到第二飞行器的方法、包含第一飞行器和第二飞行器的系统、以及飞行器
- 一种用于载人飞行器升降的动态光导识装置及系统