一种双平台机载雷达协同模式下的探测方法
文献发布时间:2024-01-17 01:23:59
技术领域
本发明属于雷达探测技术领域,尤其涉及一种双平台机载雷达协同模式下的探测方法。
背景技术
由于电磁环境复杂多样,为了提高对干扰的识别和对抗能力,现有的机载雷达一般采用单平台工作,例如,采用主动雷达+主动雷达或者主动雷达+被动雷达的复合探测实现探测能力提升,在雷达时序设计上,不同的雷达采用脉冲重复周期间交替发射工作、分时段交班工作或者分不同频段工作,没有实现同一时刻的协同探测。
双平台协同探测体制可充分利用时域、频域、空域等多方面提高雷达系统的复杂电磁环境适应能力,对于双平台机载雷达在主从协同模式下,雷达除了能接收自身雷达回波信号实现目标搜索和跟踪,同时,还能够接收目标反射的另一平台雷达发射的雷达信号,获得更加丰富的目标信息。此种探测模式充分发挥协同探测的优势,但是,从发射信号的波形和时序设计等方面能力也提出了更高的要求。
发明内容
鉴于上述的分析,本发明旨在提供一种双平台机载雷达协同模式下的探测方法,能够充分利用时间、频域、空间等多维度信息提高双平台机载雷达的抗干扰能力。
本发明的目的主要是通过以下技术方案实现的:
本发明提供了一种双平台机载雷达协同模式下的探测方法,包括如下步骤:
步骤1:第一雷达和第二雷达分别搜索目标,第一雷达记录第一雷达搜索到的目标信息,第二雷达记录第二雷达搜索到的目标信息;
步骤2:建立第一雷达和第二雷达统一的时间、频率和空间基准,第一雷达和第二雷达进行时间、频率和空间的同步,在同一频率下进入协同模式;
步骤3:第一雷达和第二雷达进行目标信息交互;
步骤4:在统一的时间基准和空间坐标系下,第一雷达和第二雷达分别将各自搜索的目标信息进行时间空间转换和数据融合判断,得到多个疑似同一目标,并在第一雷达的控制下从多个疑似同一目标中确定需要跟踪的同一跟踪目标;
步骤5:根据跟踪同一目标的信息,第一雷达和第二雷达分别计算并调整时序参数。
进一步地,步骤1中,第一雷达和第二雷达分别在各自的时间基准和空间坐标系下进行自发自收工作模式的单独工作,只接收和处理第一雷达和第二雷达各自的目标回波信号。
进一步地,第一雷达搜索发现M个目标,在第一雷达的时间基准和空间坐标系下,目标时间空间信息记为T
进一步地,第二雷达搜索发现N个目标,在第二雷达的时间基准和空间坐标系下,目标时间空间信息记为T
进一步地,步骤2中,在第一雷达的控制下,建立第一雷达和第二雷达统一的时间基准,通过第一雷达和第二雷达各自的时频同步器,第一雷达和第二雷达的工作时序均同时重新开始,对第一雷达和第二雷达的目标信息打上时标信息;
通过第一雷达和第二雷达各自的导航系统,设第一雷达的坐标为原点,在统一的空间坐标系中,第二雷达的坐标为P
进一步地,步骤3中,第一雷达和第二雷达均能获得第一雷达的目标时间空间信息以及第二雷达的目标时间空间信息的数据,第一雷达获取第二雷达的脉冲宽度,第二雷达获取第一雷达的脉冲宽度。
进一步地,步骤3中,第一雷达和第二雷达分别通过数据链进行目标信息交互。
进一步地,其特征在于,步骤4包括如下步骤:
步骤41:在仅统一的时间基准下,第一雷达的目标为T
在统一的时间基准和空间坐标系下,第一雷达的目标坐标为T
第一雷达的目标坐标:
x
y
z
第二雷达的目标坐标:
x
y
z
步骤42:设ε为协同定位误差容忍门限,若满足下式,即得到多个疑似同一目标:
设在第一雷达的M个目标和第二雷达的N个目标中,共有K个疑似同一目标,其中,K≤M,且K≤N;
步骤43:在第一雷达的控制下从多个疑似同一目标中确定需要跟踪的同一跟踪目标,并通过数据链将同一跟踪目标信息传送至第二雷达,第二雷达跟踪同一跟踪目标。
进一步地,ε为10m、15m或20m。
进一步地,其特征在于,步骤5之后还包括如下步骤:
步骤6:第一雷达和第二雷达发射正交波形,分别进行自发自收和他发自收雷达回波信号处理,对同一跟踪目标是否为真实的目标进行判断确认。
与现有技术相比,本发明至少可实现如下有益效果之一:
本发明提供的双平台机载雷达协同模式下的探测方法,针对双平台记载雷达协同模式,与单平台雷达只能接收和处理自发自收雷达回波不同,利用本实施例的探测方法,在协同模式下,第一雷达和第二雷达均可接收自发自收回波信号和他发自收回波信号,通过对自发自收回波信号和他发自收回波信号的分析、滤波和检测等处理,充分利用时域、频域、空域等多维度信息提高雷达抗干扰能力,为双平台记载雷达协同模式的工程应用奠定了基础,有良好的应用潜力和经济效益。
本发明的其他特征和优点将在随后的说明书中阐述,并且,部分的从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
附图说明
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
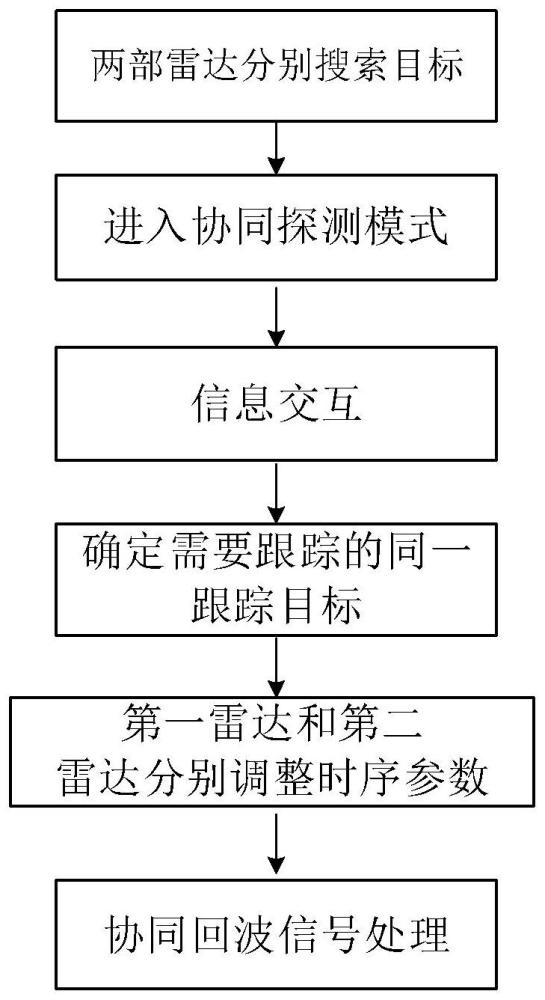
图1示出了本发明实施例提供的双平台机载雷达协同模式下时序设计方法流程示意图;
图2示出了本发明实施例提供的协同探测情况雷达与目标位置关系示意图;
图3示出了本发明实施例提供的协同探测情况下,雷达时序设计示意图;
图4a为本发明实施例一提供的双平台机载雷达协同模式下的探测方法中在仿真场景下的第一雷达自发自收的回波信号匹配滤波结果;
图4b为本发明实施例一提供的双平台机载雷达协同模式下的探测方法中在仿真场景下的第一雷达他发自收的回波信号匹配滤波结果;
图4c为本发明实施例一提供的双平台机载雷达协同模式下的探测方法中在仿真场景下的第二雷达自发自收的回波信号匹配滤波结果;
图4d为本发明实施例一提供的双平台机载雷达协同模式下的探测方法中在仿真场景下的第二雷达他发自收的回波信号匹配滤波结果。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明的一部分,并与本发明的实施例一起用于阐释本发明的原理。
为了便于描述,以下双平台机载雷达中的两个雷达分别记为第一雷达和第二雷达,不失一般性地假设,第一雷达为主雷达,第二雷达为从雷达。其中,主雷达接收的目标雷达回波,若是由主雷达发射,称为自发自收,若是由从雷达发射,称为他发自收;同样地,从雷达接收的目标雷达回波,若是由从雷达发射,称为自发自收,若是由主雷达发射,称为他发自收。
本发明提供了一种双平台机载雷达协同模式下的探测方法,参见图1至图4d,包括如下步骤:
步骤1:第一雷达和第二雷达分别搜索目标,第一雷达记录第一雷达搜索到的目标信息,第二雷达记录第二雷达搜索到的目标信息;
步骤2:建立第一雷达和第二雷达统一的时间、频率和空间基准,第一雷达和第二雷达进行时间、频率和空间的同步,在同一频率下进入协同模式;
步骤3:第一雷达和第二雷达分别通过数据链进行目标信息交互;
步骤4:在统一的时间基准和空间坐标系下,第一雷达和第二雷达分别将各自搜索的目标信息进行时间空间转换和数据融合判断,得到多个疑似同一目标,并在第一雷达的控制下从多个疑似同一目标中确定需要跟踪的同一跟踪目标;
步骤5:根据跟踪同一目标的信息,第一雷达和第二雷达分别计算并调整时序参数。
与现有技术相比,本实施提供的双平台机载雷达协同模式下的探测方法,针对双平台记载雷达协同模式,与单平台雷达只能接收和处理自发自收雷达回波不同,利用本实施例的探测方法,在协同模式下,第一雷达和第二雷达均可接收自发自收回波信号和他发自收回波信号,通过对自发自收回波信号和他发自收回波信号的分析、滤波和检测等处理,充分利用时域、频域、空域等多维度信息提高雷达抗干扰能力,为双平台记载雷达协同模式的工程应用奠定了基础,有良好的应用潜力和经济效益。
需要说明的是,在上述步骤1中,第一雷达和第二雷达分别在各自的时间基准和空间坐标系下进行自发自收工作模式的单独工作,只接收和处理第一雷达和第二雷达各自的目标回波信号。
其中,第一雷达搜索发现M个目标,在第一雷达的时间基准和空间坐标系下,目标时间空间信息记为T
第二雷达搜索发现N个目标,在第二雷达的时间基准和空间坐标系下,目标时间空间信息记为T
具体来说,在上述步骤2中,在第一雷达的控制下,建立第一雷达和第二雷达统一的时间基准,通过第一雷达和第二雷达各自的时频同步器,第一雷达和第二雷达的工作时序均同时重新开始,统一时间(即计时)基准,对第一雷达和第二雷达的目标信息打上时标信息(即在第一雷达和第二雷达的目标信息中记录在统一时间基准下的时间信息)。通过第一雷达和第二雷达各自的导航系统,不失一般性,设第一雷达的坐标为原点,在统一的空间坐标系中,第二雷达的坐标为P
在上述步骤3中,第一雷达和第二雷达均能获得第一雷达的目标时间空间信息T
为了能够确定需要跟踪的同一跟踪目标,上述步骤4包括如下步骤:
步骤41:目标信息进行时间空间转换
由于步骤3第一雷达和第二雷达获取的目标信息中距离、方位角和俯仰角分别为第一雷达和第二雷达各自坐标系下的数值,无法直接进行判断第一雷达搜索发现目标和第二雷达搜索发现目标之间对应关系。
在仅统一的时间基准下,第一雷达的目标为T
在统一的时间基准和空间坐标系下,假设,第一雷达的目标坐标为T
第一雷达的目标坐标:
x
y
z
第二雷达的目标坐标:
x
y
z
步骤42:选择需要跟踪的同一跟踪目标
因为一个目标在某一时刻,空间上仅有一个坐标值,考虑第一雷达和第二雷达的测量误差以及目标运动和具有一定尺寸大小,设ε为协同定位误差容忍门限,若满足下式,即得到多个疑似同一目标:
设在第一雷达的M个目标和第二雷达的N个目标中,共有K个疑似同一目标,其中,K≤M,且K≤N。
需要说明的是,在实际应用中,ε可以根据实际精度要求自行设置,例如,ε可以为10m、15m或20m等。
步骤43:在第一雷达的控制下从多个疑似同一目标中确定需要跟踪的同一跟踪目标T,该同一跟踪目标可以根据需要自行选择,并通过数据链将同一跟踪目标信息传送至第二雷达,第二雷达跟踪同一跟踪目标T。
对于步骤5中,设第一雷达和跟踪同一目标T的距离为R
在协同模式下,第一雷达和第二雷达与同一跟踪目标的位置关系如图2所示,第一雷达和第二雷达时序设计如图3所示。
根据跟踪同一目标的距离和方位角信息,第一雷达和第二雷达分别调整时序参数包括如下步骤:
步骤51:根据同一跟踪目标的距离,分别计算第一雷达的目标自发自收回波延时和他发自收延时,第二雷达的目标自发自收回波延时和他发自收延时,确定第一雷达和第二雷达发射波形的脉冲宽度;
其中,第一雷达接收自发自收回波延时:
回波延时范围是:[t
第一雷达接收他发自收回波延时:
回波延时范围是:[t
第二雷达接收自发自收回波延时:
回波延时范围是:[t
第二雷达接收他发自收回波延时:
回波延时范围是:[t
步骤52:分别确定第一雷达和第二雷达的波门宽度,并设置第一雷达和第二雷达的波门前沿位置和波门后沿位置,调整第一雷达和第二雷达的时序参数,使得波门内能够收到第一雷达的自发自收信号和他发自收回波信号以及第二雷达的自发自收信号和他发自收回波信号。
需要说明的是,调整第一雷达的时序参数包括如下步骤:
当第一雷达的自发自收回波延时范围和他发自收回波延时范围存在重合时,即回波延时范围满足:
t
则第一雷达时序中采样波门只需设置1个,即可实现自发自收回波和他发自收回波采集和处理。
第一雷达的采样波门设置方法如下:
第一雷达波门前沿位置设置为:t
第一雷达波门后沿位置设置为:t
当第一雷达自发自收回波延时范围和他发自收回波延时范围没有重合时,即回波延时范围满足:
t
则第一雷达时序中采样波门需设置2个,即可实现自发自收回波和他发自收回波采集和处理。
第一雷达的采样波门设置方法如下:
第一雷达自发自收回波的波门前沿位置设置为:t
第一雷达自发自收回波的波门后沿位置设置为:t
第一雷达他发自收回波的波门前沿位置设置为:t
第一雷达他发自收回波的波门后沿位置设置为:t
相应地,调整第二雷达的时序参数包括如下步骤:
当第二雷达自发自收回波延时范围和他发自收回波延时范围存在重合时,即回波延时范围满足:
t
则第二雷达时序中采样波门只需设置1个,即可实现自发自收回波和他发自收回波采集和处理。
第二雷达采样波门设置方法如下:
第二雷达波门前沿位置设置为:t
第二雷达波门后沿位置设置为:t
当第二雷达自发自收回波延时范围和他发自收回波延时范围没有重合时,即回波延时范围满足:
t
则第二雷达时序中采样波门需设置2个,即可实现自发自收回波和他发自收回波采集和处理。
第二雷达采样波门设置方法如下:
第二雷达自发自收回波的波门前沿位置设置为:t
第二雷达自发自收回波的波门后沿位置设置为:t
第二雷达他发自收回波的波门前沿位置设置为:t
第二雷达他发自收回波的波门后沿位置设置为:t
需要说明的是,发射波形的脉冲宽度是预先设置的,回波延时范围是和同一跟踪目标的目标距离有关系。
为了能够提高第一雷达和第二雷达在协同模式下的抗干扰能力,上述步骤5之后还包括如下步骤:
步骤6:第一雷达和第二雷达发射正交波形,分别进行自发自收和他发自收雷达回波信号处理,对同一跟踪目标是否为真实的目标进行判断确认。
具体来说,步骤6包括如下步骤:
步骤61:第一雷达和第二雷达发射正交波形;
其中,第一雷达的发射信号为:
τ
第二雷达的发射信号为:
τ
步骤62:第一雷达和第二雷达分别进行自发自收和他发自收的回波信号处理;
其中,第一雷达的点目标回波的信号为:
A
第二雷达的点目标回波的信号为
x
A
步骤63:对回波信号进行匹配滤波后得到脉压仿真结果,进行目标的真实性分析和识别,对同一跟踪目标是否为真实的目标进行判断确认。
通过对上述回波信号进行匹配滤波后得到脉压仿真结果,进行目标的真实性分析和识别等后续处理,从而达到提高雷达抗干扰能力。通过第一雷达和第二雷达接收自发自收回波信号和他发自收回波信号,不出现信号丢失,保证信号的完备性,并利用正负线性调频信号的正交性,使得第一雷达和第二雷达接收的自发自收信号和他发自收信号可以很好地进行分块处理,避免信号发生混叠,为双平台协同探测提供了有效的技术途径。
针对第一雷达和第二雷达的自发自收和他发自收信号的脉压仿真结果如图4a~4d所示,图4a、图4b分别表示第一雷达自发自收、他发自收回波信号匹配滤波结果;图4c、图4d分别表示第二雷达自发自收、他发自收回波信号匹配滤波结果;采用本实施例的方法能够在双平台协同模式下,第一雷达和第二雷达工作在自发自收以及他发自收的模式,获取同一目标多角度散射系数的信号回波,通过对两种信号探测结果的融合识别,提高雷达探测和抗干扰的能力。
示例性地,上述探测方法可以采用以下结构的双平台机载雷达,其包括第一雷达和第二雷达,第一雷达包括第一自发自收采集器、第一他发自收接收器、第一目标信息处理器和第一控制器,第一自发自收采集器和第一他发自收接收器分别与第一目标信息处理器和第一控制器依次连接;第二雷达包括第二自发自收采集器、第二他发自收接收器、第二目标信息处理器和第二控制器,第二自发自收采集器和第二他发自收接收器分别与第二目标信息处理器和第二控制器依次连接;第一自发自收采集器与第二他发自收接收器连接,第二自发自收采集器与第一他发自收接收器连接;
第一目标信息处理器接收第一自发自收采集器采集的第一雷达自发自收的目标信息以及第一他发自收接收器接收的第二自发自收采集器采集的第二雷达自发自收的目标信息,并在统一的时间基准和空间坐标系下,第一目标信息处理器将第一雷达的目标信息和第二雷达的目标信息进行时间空间转换和数据融合判断,得到多个疑似同一目标,在第一雷达的控制下从多个疑似同一目标中确定需要跟踪的同一跟踪目标并发送至第一控制器和第二目标信息处理器,第一控制器控制第一雷达计算并调整第一雷达的时序参数;
第二目标信息处理器接收第二自发自收采集器采集的第二雷达自发自收的目标信息以及第二他发自收接收器接收的第一自发自收采集器采集的第一雷达自发自收的目标信息,并在统一的时间基准和空间坐标系下,第二目标信息处理器将第二雷达的目标信息和第二雷达的目标信息进行时间空间转换和数据融合判断,得到多个疑似同一目标,从多个疑似同一目标中找到与第一目标信息处理器发送的同一跟踪目标相同的目标作为第二雷达的同一跟踪目标并发送至第二控制器,第二控制器控制第二雷达计算并调整第二雷达的时序参数,实现第一雷达和第二雷达跟踪同一跟踪目标。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。