作业机
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及反铲挖掘机等作业机。
背景技术
以往,已知有专利文献1所公开的作业机。
专利文献1所公开的作业机具有通过脚踏操作对行驶装置进行操作的左右一对行驶踏板。
在先技术文献
专利文献
专利文献1:日本国公开专利公报“日本特开2019-19572号公报”
发明内容
发明要解决的课题
作为现有的行驶踏板的上表面的踏面形成为与踏板轴的轴心平行的平坦的面。因此,当操作者使脚底与踏面对齐时,存在脚的动作不顺畅而疲劳这样的问题。
本发明是鉴于所述问题点而完成的,其目的在于提供一种能够顺畅地进行踏板操作的作业机。
用于解决课题的技术方案
本发明的一个方式的作业机具备:驾驶座;以及踏板,其配置在所述驾驶座的前方,通过脚踏操作而被操作,所述踏板具有:踏板主体,其在给定方向上延伸;踏板轴,其将所述踏板主体支承为能够在所述给定方向上摆动;以及踏面,其设置于所述踏板主体的上表面侧,供操作者放置脚,所述踏面形成为随着从操作者放置的脚的大拇趾侧朝向小趾侧而距所述踏板主体的高度逐渐变低的倾斜状。
另外,所述踏板轴配置于所述踏板的前后方向中途部,将所述踏板主体支承为能够前后摆动,且沿机体宽度方向延伸地配置。
另外,所述踏板具有踩踏部件,所述踩踏部件设置于所述踏板主体的上表面侧的比所述踏板轴靠操作者放置的脚的趾尖侧处,所述踏面形成于所述踩踏部件的上表面。
另外,所述作业机具备相互隔开间隔配置的一对所述踏板。
另外,一对所述踏板的间隔随着向操作者放置的脚的趾尖侧移行而逐渐变宽。
另外,所述踩踏部件随着从操作者放置的脚的大拇趾侧朝向小趾侧而向俯视时接近所述踏板轴的一侧转移的方向倾斜。
另外,所述作业机具备行驶装置,所述踏板是操作所述行驶装置的行驶踏板。
另外,所述踏板主体的上表面是与所述踏板主体的延伸方向平行的平面状,所述踏面形成为随着从操作者放置的脚的大拇趾侧朝向小趾侧而距所述踏板主体的上表面的高度逐渐变低的倾斜状。
另外,所述作业机具备:操纵台,其配置于所述驾驶座的前方;操纵部件,其设置于所述操纵台,且被把持而操作;以及扶手,其从所述操纵台向后方延伸,所述踏板配置于在将肘部放置于所述扶手而把持着所述操纵部件的操作者使上体成为前倾姿势的状态下被操作的位置。
发明效果
根据上述的作业机,能够一边闭合膝盖一边在脚的大拇趾侧进行踏板操作,能够顺畅地进行踏板操作。
附图说明
图1是作业机的俯视图。
图2是作业机的侧视图。
图3是驾驶室的侧视图。
图4是驾驶部的立体图。
图5是驾驶部的俯视图。
图6是行驶踏板及支承构造体的侧视图。
图7是行驶踏板及支承构造体的主视图。
图8是行驶踏板的俯视图。
图9是图8的J1-J1线向视剖视图。
图10是图8的J2-J2线向视图。
具体实施方式
以下,适当参照附图对本发明的一个实施方式进行说明。
图1是表示本实施方式的作业机1的整体结构的概略俯视图。图2是作业机1的概略侧视图。在本实施方式中,作为作业机1,例示了作为回转作业机的反铲挖掘机。
如图1、图2所示,作业机1具备机体(回转台)2、行驶装置3以及作业装置4。在机体2上搭载有驾驶室5。在驾驶室5的室内设置有供操作者(驾驶员)就座的驾驶座(座位)6。换言之,驾驶座6搭载于机体2,驾驶室5包围驾驶座6。驾驶座6具有作为操作者就座的部位的座部6A和作为承受操作者的背部的部位的靠背部6B。
在本实施方式中,将朝向就座于作业机1的驾驶座6的操作者的前侧的方向(图1、图2的箭头A1方向)设为前方,将朝向操作者的后侧的方向(图1、图2的箭头A2方向)设为后方,将图1、图2的箭头K1方向设为前后方向,将操作者的左侧(图1的箭头B1方向)设为左方,将操作者的右侧(图1的箭头B2方向)设为右方来进行说明。
另外,如图1所示,将与前后方向K1正交的方向即水平方向作为机体宽度方向K2(机体2的宽度方向)进行说明。
如图1、图2所示,行驶装置3是将机体2支承为能够行驶的履带式的行驶装置,具有行驶框架3A、设置于行驶框架3A的左侧的第一行驶装置3L、以及设置于行驶框架3A的右侧的第二行驶装置3R。第一行驶装置3L由第一行驶马达M1驱动,第二行驶装置3R由第二行驶马达M2驱动。在行驶装置3的前部安装有推土装置7。另外,行驶装置3不限于履带式,例如也可以是轮式的行驶装置。
如图2所示,机体2经由回转轴承8以能够绕回转轴心X1回转的方式支承于行驶框架3A上。机体2由回转马达M3回转驱动。在机体2的后部搭载有燃料箱T1、工作油箱T2及配重10。
如图1所示,驾驶室5搭载于机体2的宽度方向K2的一侧部(左侧部)。在机体2的宽度方向K2的另一侧部(右侧部)搭载有原动机E1。原动机E1是柴油发动机。另外,原动机E1既可以是汽油发动机,也可以是具有发动机以及电动机的混合动力型。在原动机E1的后部安装有液压泵P1。
如图1、图2所示,在支承托架20的前部经由摆动轴26以能够绕纵轴摆动的方式安装有摆动托架21。在摆动托架21上安装有作业装置4。
如图2所示,作业装置4具有动臂22、斗杆23、铲斗(作业工具)24。动臂22的基部22A经由动臂枢轴27以能够绕横轴(沿机体宽度方向K2延伸的轴心)转动的方式枢轴安装于摆动托架21的上部。
斗杆23以能够绕横轴转动的方式枢轴安装于动臂22的前端侧。铲斗24设置为能够在斗杆23的前端侧进行挖掘动作以及倾倒动作。挖掘动作是指使铲斗24向接近动臂22的方向摆动的动作,例如是挖掘砂土等的情况下的动作。另外,倾倒动作是指使铲斗24向远离动臂22的方向摆动的动作,例如是使挖掘的砂土等落下(排出)的情况下的动作。
作业机1中,能够代替铲斗24或者在此基础上,安装能够由液压致动器驱动的其他作业工具(液压配件)。作为其他的作业工具,能够例示液压破碎机、液压压碎机、角形扫把、接地螺旋钻、托盘装运叉、清扫机、割草机、除雪机等。
摆动托架21能够通过机体2所具备的摆动缸C2的伸缩而摆动。动臂22能够通过动臂缸C3的伸缩而摆动。斗杆23能够通过斗杆缸C4的伸缩而摆动。铲斗24能够通过铲斗缸(作业工具缸)C5的伸缩而进行挖掘动作以及倾倒动作。摆动缸C2、动臂缸C3、斗杆缸C4、铲斗缸C5由液压缸构成。
如图1、图3所示,在驾驶室5的室内设置有操纵装置41。操纵装置41设置在驾驶座6的前方。由驾驶座6和操纵装置41构成使作业机1运转(操纵机体2、行驶装置3、作业装置4、摆动托架21等)的驾驶部42。
如图3、图4所示,驾驶座6经由座椅台76等支承于构成驾驶室5的底部的地板部5B。在座椅台76上设置有悬架装置77,在该悬架装置77上经由滑轨78以能够调整前后位置的方式设置有驾驶座6。
如图3、图4所示,操纵装置41具有操纵台81、操纵部件82、监视器84、推土铲杆80、左右一对行驶踏板(踏板)85。
操纵台81设置在机体2上的驾驶座6的前方,具有竖立设置在地板部5B(机体2)的基台86和配置在基台86的上部的操纵台主体87。操纵部件82是操作者把持并操作的部件,安装于操纵台主体87(操纵台81)。操纵部件82包括在机体宽度方向K2上排列设置的第一操纵手柄82L及第二操纵手柄82R。第一操纵手柄82L及第二操纵手柄82R例如能够进行机体2的回转操作、动臂15的摆动操作、斗杆23的摆动操作、铲斗24的摆动操作。
如图4所示,操纵台主体87具有:机体宽度方向K2中央部的安装部92;以及设置于安装部92的左和右的扶手93。安装部92以能够装卸的方式安装于基台86。将位于安装部92的左侧的扶手93称为第一扶手93L,将位于安装部92的右侧的位置的扶手93称为第二扶手93R。
第一扶手93L具有:扶手基部93L1,其设置于安装部92的左侧方;以及扶手主体93L2,其枢轴支承于扶手基部93L1的后部。第二扶手93R具有:扶手基部93R1,其设置于安装部92的右侧方;以及扶手主体93R2,其与扶手基部93R1一体形成。
扶手主体93L2从扶手基部93L1向后方(驾驶座6侧)延伸。扶手主体93R2也从扶手基部93R1向后方(驾驶座6侧)延伸。即,扶手93设置于操纵台81,从该操纵台81侧向驾驶座6侧延伸。
如图3所示,扶手93(第一扶手93L及第二扶手93R)的下表面形成为随着朝向后方而向上方转移的倾斜面。由此,能够使扶手93的下方空间随着朝向驾驶座6而变宽。在本实施方式的驾驶部42中,在第一扶手93L的下方配置有操作者的左腿,在第二扶手93R的下方配置有操作者的右腿。通过将扶手93的下表面形成为随着朝向后方而向上方转移的倾斜面,能够扩大操作者的腿的配置空间。
如图4所示,扶手主体93L2及扶手主体93R2具有在后部放置操作者的肘部的肘部放置部93A。肘部放置部93A例如由具有缓冲性的部件形成。操纵部件82在肘部放置在扶手93上并把持着该操纵部件82的操作者使上体成为前倾姿势的状态下被操作。详细而言,操作者在第一扶手93L的肘部放置部93A放置左臂的肘,并且用左手把持第一操纵手柄82L,在第二扶手93R的肘部放置部93A放置右臂的肘,并且用右手把持第二操纵手柄82R。由此,操作者在就座于驾驶座6的状态下,在使上体成为前倾姿势的状态下操作操纵部件82。
推土铲杆80是操纵推土装置7的杆。
如图3、图4所示,一对行驶踏板85是通过就座于驾驶席6的操作者进行脚踏操作来操作行驶装置3的部件,设置于地板部5B。一对行驶踏板85中的一方(左)的行驶踏板85L是对第一行驶装置3L进行操纵的踏板,另一方(右)的行驶踏板85R是对第二行驶装置3R进行操纵的踏板。
如图5所示,一对行驶踏板85在驾驶座6的前方沿机体宽度方向K2隔开间隔地排列配置。详细而言,一方的行驶踏板85L配置于驾驶座6的机体宽度方向K2一侧部(左侧部)的前方,另一方的行驶踏板85R配置于驾驶座6的机体宽度方向K2的另一侧部(右侧部)的前方。换言之,一方的行驶踏板85L配置在基台86的左侧,另一方的行驶踏板85R配置在基台86的右侧。另外,一方的行驶踏板85L在第一扶手93L的下方且以在俯视时与其重叠的方式配置,另一方的行驶踏板85R在第二扶手93R的下方且以在俯视时与其重叠的方式配置。因此,在操作行驶踏板85时,左腿被插入第一扶手93L与一方的行驶踏板85L之间,右腿被插入第二扶手93R与另一方的行驶踏板85R之间。而且,一对行驶踏板85配置在将肘部放置在扶手93上而把持着操纵部件82的操作者在使上体成为前倾姿势的状态下被操作的位置。
如图5所示,一方的行驶踏板85L与另一方的行驶踏板85R的机体宽度方向K2的相互间隔随着向前方移行而逐渐变宽。即,一对行驶踏板85的间隔随着向操作者放置的脚的趾尖侧移行而逐渐变宽。详细而言,行驶踏板85配置为随着朝向前方而向着从一方的行驶踏板85L与另一方的行驶踏板85R之间的机体宽度方向K2中央(踏板间中央)CL向沿机体宽度方向K2远离的方向即分离方向D1转移的倾斜状。
行驶踏板85是进行作业机1的前进和后退的操作、转向的操作的踏板。即,当向前侧踩踏行驶踏板85时,作业机1(机体2)前进,当向后侧踩踏行驶踏板85时,作业机1(机体2)后退。另外,若左右的行驶踏板85的踩踏方向及踩踏量相同则直行行驶,若一方的行驶踏板85L与另一方的行驶踏板85R的踩踏量不同则进行回转行驶。即,能够通过一方的行驶踏板85L的踩踏量来变更第一行驶马达M1的转速,通过另一方的行驶踏板85R的踩踏量能够变更第二行驶马达M2的转速。在本实施方式的作业机1中,在直行行驶时,为了得到直行性,将行驶踏板85踩踏(全面踩踏)至最大位置。行驶速度的变更能够通过设置于操纵部件82的增减速开关来进行。
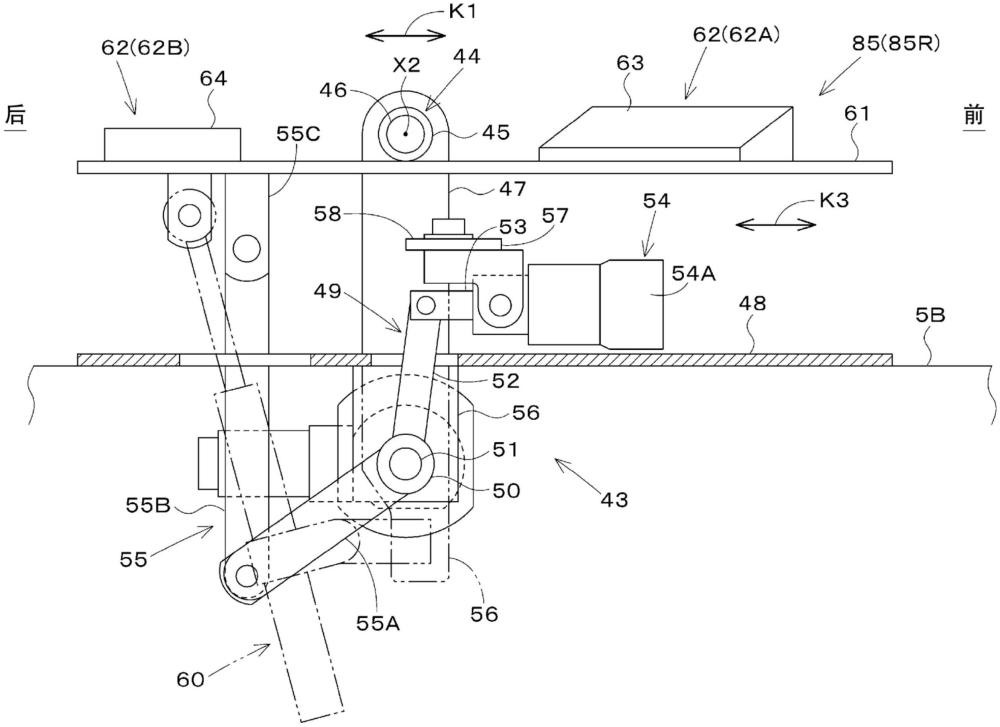
图6表示从右侧方观察另一方(右)的行驶踏板85的侧视图,图7表示从前方观察另一方的行驶踏板85R的主视图。
如图6、图7所示,各行驶踏板85被支承构造体43支承于地板部5B。支承一方的行驶踏板85L的支承构造体43和支承另一方的行驶踏板85R的支承构造体43的结构相同,因此以另一方的行驶踏板85R的支承构造体43为代表进行说明,省略一方的行驶踏板85L的支承构造体43的说明。
支承构造体43具有支承行驶踏板85的踏板轴44。各行驶踏板85被踏板轴44支承为能够前后摆动。该踏板轴44配置在行驶踏板85的上表面侧。另外,踏板轴44配置在行驶踏板85的前后方向中途部。详细而言,踏板轴44配置在比行驶踏板85的前后方向中央部靠后方的位置。而且,踏板轴44沿机体宽度方向K2延伸配置。
踏板轴44具有固定于行驶踏板85的筒状的转动轴45和插通于转动轴45的支轴46。转动轴45以及支轴46具有沿机体宽度方向K2延伸的轴心(转动轴心)X2,转动轴45被支承为能够相对于支轴46绕轴心旋转。即,行驶踏板85绕机体宽度方向K2的转动轴心X2前后摆动。
支轴46安装在左右一对踏板托架47之间。左右的踏板托架47竖立设置在安装于地板部5B的底板48上。一个踏板托架47配置在踏板轴44和行驶踏板85的左侧,另一个踏板托架47配置在踏板轴44和行驶踏板85的右侧。因此,行驶踏板85经由踏板轴44以及一对踏板托架47以能够前后摆动的方式支承于地板部5B(底板48)。
支承构造体43具有使行驶踏板85从自中立位置向前或向后踏入的踩踏位置返回到中立位置的中立复位机构49。中立复位机构49具有转动筒50、转动轴51、臂部件52、连动轴53、复位弹簧装置54以及传递连杆55。转动筒50以能够绕沿机体宽度方向K2延伸的轴心一体转动的方式嵌到转动轴51的外侧。转动轴51以能够绕沿机体宽度方向K2延伸的轴心转动的方式支承于在底板48的下表面侧沿机体宽度方向K2隔开间隔地设置的左右一对托架部件56之间。臂部件52以上方突出状固定于转动筒50。连动轴53的一端侧枢轴支承连结于臂部件52的上部。连动轴53的另一端侧以能够沿前后方向移动的方式(能够突出和后退地)收纳于复位弹簧装置54的壳体54A。复位弹簧装置54具有使连动轴53返回到行驶踏板85位于中立位置时的初始位置的复位弹簧(省略图示)。复位弹簧收纳于壳体54A内。壳体54A配置在底板48的上方,枢轴支承于托架部件57。托架部件57安装于固定在一对踏板托架47之间的固定板58。传递连杆55具有:一端侧固定于转动筒50的第一连杆55A;一端侧枢轴支承连结于该第一连杆55A的另一端侧的第二连杆55B;一端侧枢轴支承连结于该第二连杆55B的另一端侧且另一端侧固定于行驶踏板85的下表面的第三连杆55C。
在上述结构的中立复位机构49中,当将行驶踏板85从中立位置向前侧踩踏时,第二连杆55B被向上方拉动,并且第一连杆55A、转动筒50以及臂部件52一体旋转,将连动轴53向前方推动而压入壳体54A内。于是,壳体54A内的复位弹簧被压缩。若解除行驶踏板85的踩踏,则通过复位弹簧的作用力使行驶踏板85返回中立位置。另外,当将行驶踏板85从中立位置向后侧踩踏时,第二连杆55B被向下方推动,并且第一连杆55A、转动筒50以及臂部件52一体旋转,将连动轴53向后方拉动而从壳体54A内拉出。于是,壳体54A内的复位弹簧被压缩。若解除行驶踏板85的踩踏,则通过复位弹簧的作用力使行驶踏板85返回中立位置。
另外,行驶踏板85通过角度传感器59进行踩踏量以及踩踏方向的检测。角度传感器59例如由电位器形成。角度传感器59通过检测转动轴51的旋转角度及旋转方向来检测行驶踏板85的踩踏量和踩踏方向。来自角度传感器59的检测信号被发送到控制装置。控制装置基于角度传感器59的检测信号,控制对第一行驶马达M1、第二行驶马达M2进行控制的控制阀。
另外,行驶踏板85的后部为了赋予自然的踏板操作感而由减振装置60支承。
图8表示另一方的行驶踏板85R的俯视图。图9表示图8的J1-J1线向视剖视图。图10表示图8的J2-J2线向视图。
如图6、图8所示,行驶踏板85具有踏板主体61和固定在踏板主体61的上表面侧的踩踏部件62。踏板主体61由平板状的板材形成。如图6所示,踏板主体61在给定方向K3上延伸,踏板轴44将踏板主体61支承为能够在给定方向K3上摆动。在本实施方式中,踏板主体61沿前后方向K1延伸。另外,踏板主体61的上表面是与通过踏板轴44且与平行于踏板主体61的延伸方向(给定方向K3)的平面大致平行的平面状。在踏板主体61的上表面固定有踏板轴44的转动轴45。
踩踏部件62是供操作者的脚放置的部件。即,踩踏部件62是由操作者踩踏的部件。在本实施方式中,踩踏部件62包括设置在踏板主体61的上表面侧的比踏板轴44靠前侧的位置的第一踩踏部件62A、以及设置在踏板主体61的上表面侧的比踏板轴44靠后侧的位置的第二踩踏部件62B。踩踏部件62(第一踩踏部件62A、第二踩踏部件62B)由俯视呈矩形的块部件形成。第一踩踏部件62A在踏板主体61的上表面前部遍及宽度方向(机体宽度方向K2)地设置。
第一踩踏部件62A的上表面是由操作者踩踏的踏面63。换言之,行驶踏板85具有设置于踏板主体61的上表面侧的比踏板轴44靠操作者放置的脚的趾尖侧的第一踩踏部件62A(踩踏部件62),踏面63形成于踩踏部件62的上表面。
如图9、图10所示,踏面63形成为随着朝向分离方向D1而距踏板主体61的上表面的高度H1逐渐变低的倾斜状。具体而言,另一方的行驶踏板85R的第一踩踏部件62A的踏面63的左侧(踏板间中央CL侧)高,右侧低。一方的行驶踏板85L的第一踩踏部件62A的踏面63的右侧(踏板间中央CL侧)高,左侧低。因此,第一踩踏部件62A的踏面63的高侧的部位(高位侧部位)63a是载置于踏面63的脚的大拇趾侧,行驶踏板85的第一踩踏部件62A的踏面63的低侧的部位(低位侧部位)63b是载置于踏面63的脚的小趾侧。(参照图5)。
因此,如图6、图9所示,踏面63形成为随着从操作者放置的脚的大拇趾侧63a朝向小趾侧63b而距踏板主体61的上表面(基准面)的高度H1逐渐变低的倾斜状。
如图9所示,踏面63相对于踏板轴44的轴心(转动轴心)X2倾斜。另外,第一踩踏部件62A的高位侧部位63a位于比转动轴心X2靠上方的位置,第一踩踏部件62A的低位侧部位63b位于比转动轴心X2靠下方的位置。
如图8所示,第一踩踏部件62A以在俯视观察时随着朝向分离方向D1而向后方转移的方向(倾斜方向)D2倾斜的方式设置。换言之,踩踏部件62随着从操作者放置的脚的大拇趾侧朝向小趾侧而向俯视时接近踏板轴44的一侧转移的方向倾斜。详细而言,第一踩踏部件62A的前表面62a沿随着朝向分离方向D1而向后方转移的方向D2为倾斜状,第一踩踏部件62A的后表面62b也沿随着朝向分离方向D1而向后方转移的方向D2为倾斜状。因此,第一踩踏部件62A相对于机体宽度方向K2倾斜地设置,并且相对于踏板轴44的轴心X2倾斜地设置。在本实施方式中,踏面63(第一踩踏部件62A)以随着朝向倾斜方向D2而高度H1逐渐变低的方式倾斜。
另外,第一踩踏部件62A的踏板间中央CL侧的侧面62c相对于踏板主体61的踏板间中央CL侧的侧缘61a倾斜,第一踩踏部件62A的与所述侧面62c相反侧的侧面62d与踏板主体61的与所述侧缘61a相反的一侧的侧缘61b一致。
如图6、图8所示,第二踩踏部件62B形成为俯视矩形的长方体形状,前表面62a及后表面62b以与踏板轴44的轴心平行的方式配置而设置。另外,作为第二踩踏部件62B的上表面的踏面(其他踏面)64形成为与转动轴心X2平行的平坦面。第二踩踏部件62B的踏面64与载置于行驶踏板85的操作者的脚的脚后跟对应。即,第二踩踏部件62B由操作者的脚后跟踩踏。
另外,在本实施方式中,形成于第一踩踏部件62A的踏面63的整个面形成为倾斜状,但并不限定于此。例如,也可以仅将踏面63的前部侧的部分形成为倾斜状。另外,第一踩踏部件62A和第二踩踏部件62B也可以一体形成。第二踩踏部件62B也与第一踩踏部件62A同样地,也可以形成为随着朝向分离方向D1而距踏板主体61的高度H1逐渐降低的倾斜状。另外,在图例中,示出行驶踏板85在中立位置成为水平姿势的状态,但并不限定于此。例如,行驶踏板85在中立位置可以是前倾状,也可以是后倾状。
在上述结构的行驶踏板85中,在前进时、即向前侧踩踏行驶踏板85时,能够一边闭合膝盖一边用脚的大拇趾踩踏(压入)踏面进行踏板操作。另外,在后退时,即,在向后侧踩踏行驶踏板85时,能够一边打开膝盖一边用脚后跟踩踏(压入)踏面进行踏板操作。
另外,在本实施方式中,对踏板主体61的上表面为相对于通过踏板轴44且与平行于踏板主体61的延伸方向(给定方向K3)的平面平行的平面状的结构进行了说明,但不限于此。例如,踏板主体61的上表面也可以是具有凹凸、倾斜的形状,在该情况下,将通过踏板主体61的轴支承于踏板轴44的部分且与踏板轴44的延伸方向以及踏板主体61的延伸方向(给定方向K3)平行的平面作为踏板主体61的基准面,将踏面63形成为随着从操作者放置的脚的大拇趾侧63a朝向小趾侧63b而距踏板主体61(踏板主体61的基准面)的高度逐渐降低的倾斜状即可。
另外,在本实施方式中,对踏板轴44固定于踏板主体61的上表面的结构进行了说明,但不限于此,例如,也可以将踏板轴44固定于踏板主体61的下表面。
另外,在本实施方式中,对将本发明应用于一对行驶踏板85的每一个的情况的例子进行了说明,但不限于此,也可以仅应用于左右一方的脚侧所具备的踏板。另外,并不限于对行驶装置3进行操作的行驶踏板85,例如也可以应用于用于对摆动缸C2、动臂缸C3、斗杆缸C4、铲斗缸C5、推土铲缸、或者装配于作业机1的各种设备等行驶装置3以外的设备进行操作的踏板。
另外,在本实施方式中,对应用于操作者将肘部放置在扶手93上而把持着操纵部件82的操作者使上体成为前倾姿势的状态下进行踏板操作的反铲挖掘机的情况的例子进行了说明,但不限于此。例如,也可以是在操作者倚靠于驾驶座6的靠背部6B的状态下进行踏板操作的结构,也可以应用于反铲挖掘机以外的各种作业机。
由此,能够顺畅地进行踏板操作。另外,能够容易进行微操作。
在上述作业机1中,具备驾驶座6和配置在驾驶座6的前方的、通过脚踏操作而被操作的踏板85,踏板85具有沿给定方向K3延伸的踏板主体61、将踏板主体61支承为能够在给定方向K3上摆动的踏板轴44、以及设置在踏板主体61的上表面侧并供操作者放置脚的踏面63,踏面63形成为随着从操作者放置的脚的大拇趾侧(高位侧部位63a)朝向小趾侧(低位侧部位63b)而距踏板主体61的高度H1逐渐变低的倾斜状。
根据该结构,能够一边闭合膝盖一边在脚的大拇趾侧进行踏板操作,能够顺畅地进行踏板操作。
另外,踏板轴44配置在踏板85的前后方向K1中途部,将踏板主体61支承为能够前后摆动,且沿机体宽度方向K2延伸配置。
根据该结构,也能够顺畅地进行行驶踏板85的踏板操作。
另外,踏板85具有设置在踏板主体61的上表面侧的比踏板轴44靠操作者放置的脚的趾尖侧的踩踏部件62,踏面63形成在踩踏部件62的上表面。
根据该结构,能够容易地形成倾斜状的踏面63。
另外,具备相互隔开间隔地配置的一对踏板85。
根据该结构,能够顺畅地进行具备一对踏板的作业机1上的踏板操作。
另外,一对踏板85的间隔随着向操作者放置的脚的趾尖侧移行而逐渐变宽。
根据该结构,能够将操作者的两脚轻松地放置在一对踏板85上。
另外,踩踏部件62也可以随着从操作者放置的脚的大拇趾侧(高位侧部位63a)朝向小趾侧(低位侧部位63b)而向俯视时接近踏板轴44的一侧转移的方向D2倾斜。
另外,具备行驶装置3,踏板85是操作行驶装置3的行驶踏板。
根据该结构,能够顺畅地进行行驶踏板的踏板操作。
另外,踏板主体61的上表面是与踏板主体61的延伸方向K3平行的平面状,踏面63形成为随着从操作者放置的脚的大拇趾侧(高位侧部位63a)朝向小趾侧(低位侧部位63b)而距踏板主体61的上表面的高度逐渐变低的倾斜状。
根据该结构,也能够顺畅地进行踏板操作。
另外,具备:操纵台81,其配置于驾驶座6的前方;操纵部件82,其设置于操纵台81,且被把持而操作;以及扶手93,其从操纵台81向后方延伸,踏板85配置于在将肘部放置于扶手93而把持着操纵部件82的操作者使上体成为前倾姿势的状态下被操作的位置。
在本实施方式中,能够提高在将肘部放置于扶手93而把持着操纵部件82的操作者使上体成为前倾姿势的状态下的行驶踏板85的操作性。
以上,对本发明的一个实施方式进行了说明,但应该认为本次公开的实施方式在所有方面都是例示而不是限制性的。本发明的范围不是由上述说明表示,而是由请求的范围示出,意在包括与请求的范围等同的意思及范围内的所有变更。
标号说明
3行驶装置
6驾驶座
44踏板轴
61踏板主体
62踩踏部件
63踏面
63a大拇趾侧(高位侧部位)
63b小趾侧(低位侧部位)
81操纵台
82操纵部件
85踏板(行驶踏板)
93扶手
D2方向
H1高度
K3给定方向(延伸方向)
K2机体宽度方向
X2轴心。
- 操作电机和/或与其耦合的固定作业机的方法及该作业机
- 电动作业机用通信单元以及电动作业机
- 作业装置、作业车辆、作业机以及管理系统
- 农作业机、农作业机控制程序、记录有农作业机控制程序的记录介质、农作业机控制方法、收获机、收获机控制程序、记录有收获机控制程序的记录介质、收获机控制方法
- 农作业机、农作业机控制程序、记录有农作业机控制程序的记录介质、农作业机控制方法