多体分离试验中基于简化点云模型的碰撞预测方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及多体分离试验领域,具体是多体分离试验中基于简化点云模型的碰撞预测方法。
背景技术
飞行器在进行多体分离过程中受力非常复杂,若分离位姿不合理,极易发生重大分离事故。多体分离试验能在风洞中实现飞行器分离过程的模拟,从而得到可靠的分离轨迹,多体分离试验能够为飞行器结构以及分离策略的设计提供依据。
点云是三维空间中点数据的集合,其能将模型复杂的外表面离散为若干点,降低了后续数据处理的难度。PCL(Point Cloud Library)是可供多平台使用的开源C++编程库,其集成了大量点云的相关算法,是3D点云的高效处理途径。
在进行多体分离试验中,多体分离机构的轨迹是系统根据实时的气动力数据实时解算得到的,在进行多体分离试验之前并不知道其分离轨迹。风洞试验段中空间狭窄,在进行多体分离试验过程中,多体分离机构极易与风洞试验段的各种设备发生碰撞,进而引发重大安全事故。包围盒法是目前较为成熟的碰撞预测方法,该方法应用较为简单,但是其对具有复杂外形的飞行器模型精度有限。在实际试验过程中,飞行器模型与试验段设备之间距离可达毫米级,常规的包围盒碰撞预测方法难以应用。
发明内容
本发明的目的是提供多体分离试验中基于简化点云模型的碰撞预测方法,包括以下步骤:
1)获取飞行器三维模型;
2)对所述飞行器三维模型进行处理,生成预设点数的飞行器点云模型;
3)选定模型特征靶点,提取飞行器特征靶点的坐标数据;
4)将特征靶点的坐标数据插入到飞行器点云模型中,从而生成特征点云模型;
5)进行多体分离试验,标定空间坐标系,利用视觉定位传感器获取飞行器实体模型特征靶点的空间坐标;
6)采集飞行器实体模型的气动力数据,并根据气动力数据和特征靶点空间坐标解算飞行器实体模型下一时刻位姿;
7)利用SVD算法对飞行器点云模型和下一时刻的飞行器实体模型进行匹配,得到位姿转换后的飞行器点云模型;
8)对位姿转换后的飞行器点云模型进行简化;
9)利用飞行器点云模型进行碰撞预测。
进一步,对飞行器三维模型进行处理的方法包括PCL内置的pcl_mesh_sampling算法。
进一步,提取飞行器特征靶点坐标数据的方法包括PCL内置的obj2pcd算法。
进一步,所述特征靶点包括飞行器三维模型的若干边缘点。
进一步,气动力数据的测量装置包括飞行器实体模型上的测力天平。
进一步,步骤7)中,位姿转换后飞行器点云模型的坐标矩阵A'如下所示:
A'=TA (1)
式中,A为坐标转换前飞行器点云模型的坐标矩阵;T为坐标转换矩阵。
进一步,步骤8)中,对飞行器点云模型进行简化的方法包括:保留飞行器点云模型和多体分离试验喷管模型重叠的部分。
进一步,步骤9)中,利用飞行器点云模型进行碰撞预测的步骤包括:
9.1)建立多体分离试验喷管模型的内表面表达式,即:
x
式中,h为圆锥喷管顶点到坐标原点的距离,k>0为常数;(x,y)为喷管模型内表面任意点的坐标;
9.2)判断飞行器点云模型在XOZ平面上的投影是否有点位于喷管模型内,若是,则预测结果为有碰撞风险,否则,预测结果为无碰撞风险。
进一步,步骤9)中,利用飞行器点云模型进行碰撞预测前,根据飞行器部件之间碰撞预测的阈值,对飞行器点云模型进行放缩。
进一步,步骤9)中,利用飞行器点云模型进行碰撞预测后,将预测结果返回给飞行器的运动控制系统;
所述运动控制系统根据预测结果生成飞行器的运动决策,进而控制飞行器运动。
值得说明的是,本发明提供一种多体分离试验中基于简化点云模型的碰撞预测方法,包括步骤:多体分离试验的三维模型导入计算机,利用PCL内置的pcl_mesh_sampling算法生成预设点数的点云模型;选定模型特征靶点,利用PCL内置的obj2pcd算法提取特征靶点坐标数据;将特征靶点坐标数据插入到pcl_mesh_sampling算法生成的点云模型中;进行多体分离试验,标定空间坐标系,视觉定位传感器获取实体模型特征靶点的空间坐标;系统根据采集到的气动力数据解算出飞行器模型下一时刻位姿;利用SVD算法实现点云模型到下一时刻位姿的匹配;根据点云模型在风洞试验段中的位姿对点云模型进行局部保留;放缩试验段设备模型,根据点面关系进行碰撞预测,为后续的运动提供决策依据。
本发明的技术效果是毋庸置疑的,本发明能高精度地进行实时的碰撞预测,提高了整个多体分离试验的安全性。
本发明根据时效性要求,利用三维模型生成预设点数、具有特征靶点的点云模型。
本发明的点云模型生成以及碰撞预测可以独立于控制系统,在系统运行过程中占用较少的PLC资源。
在进行预测判断前,本发明对点云模型进行简化,降低了后续数据处理的复杂度,在保证碰撞预测精度的同时提高了试验效率。
更进一步的,点云模型可以利用开放的C++编程库PCL实现可视化,便于用户观测下一时刻模型位置状态。
附图说明
图1(a)-(b)是本发明实物模型和点云模型示意图;
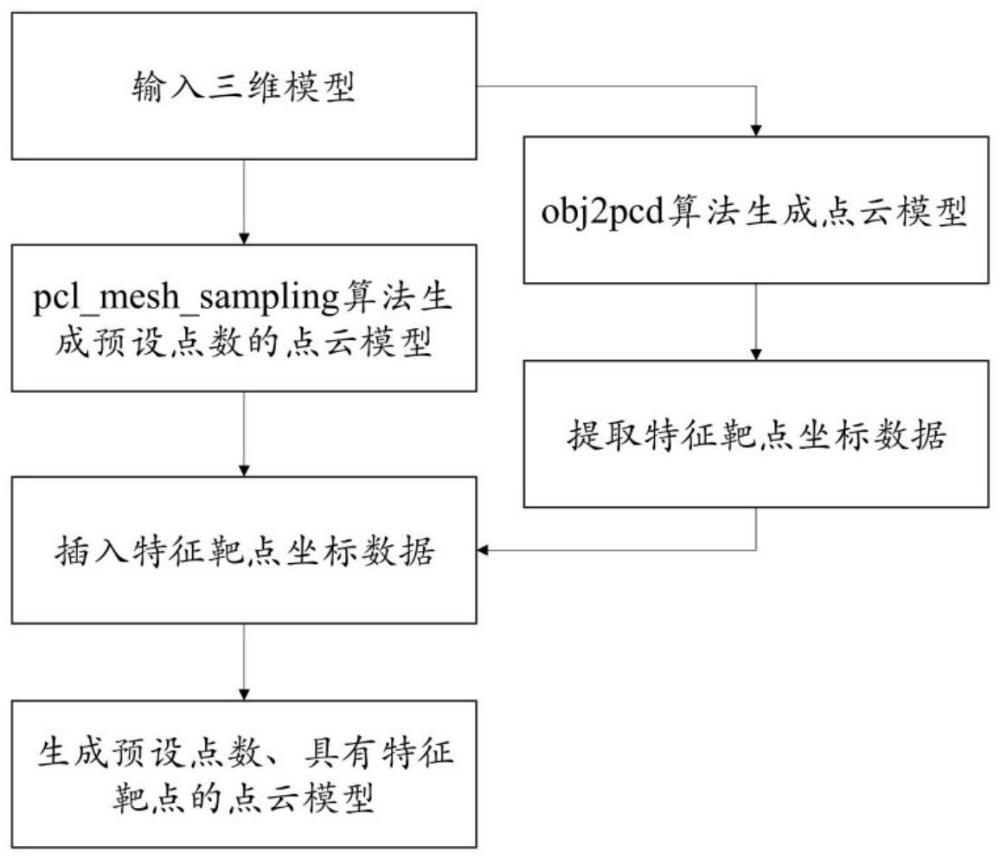
图2是本发明特征点云模型生成流程图;
图3是本发明特征点云模型匹配与简化流程图;
图4是本发明碰撞预测方法原理图;
图5是本发明碰撞预测流程图。
具体实施方式
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
实施例1:
参见图1至图5,多体分离试验中基于简化点云模型的碰撞预测方法,包括以下步骤:
1)获取飞行器三维模型;
2)对所述飞行器三维模型进行处理,生成预设点数的飞行器点云模型;
3)选定模型特征靶点,提取飞行器特征靶点的坐标数据;
4)将特征靶点的坐标数据插入到飞行器点云模型中,从而生成特征点云模型;
5)进行多体分离试验,标定空间坐标系,利用视觉定位传感器获取飞行器实体模型特征靶点的空间坐标;
6)采集飞行器实体模型的气动力数据,并根据气动力数据和特征靶点空间坐标解算飞行器实体模型下一时刻位姿;
7)利用SVD算法对飞行器点云模型和下一时刻的飞行器实体模型进行匹配,得到位姿转换后的飞行器点云模型;
8)对位姿转换后的飞行器点云模型进行简化;
9)利用飞行器点云模型进行碰撞预测。
对飞行器三维模型进行处理的方法包括PCL(Point Cloud Library,点云库)内置的pcl_mesh_sampling算法。
提取飞行器特征靶点坐标数据的方法包括PCL内置的obj2pcd算法。
所述特征靶点包括飞行器三维模型的若干边缘点。
气动力数据的测量装置包括飞行器实体模型上的测力天平。
步骤7)中,位姿转换后飞行器点云模型的坐标矩阵A'如下所示:
A'=TA (1)
式中,A为坐标转换前飞行器点云模型的坐标矩阵;T为坐标转换矩阵。
步骤8)中,对飞行器点云模型进行简化的方法包括:保留飞行器点云模型和多体分离试验喷管模型重叠的部分。
步骤9)中,利用飞行器点云模型进行碰撞预测的步骤包括:
9.1)建立多体分离试验喷管模型的内表面表达式,即:
x
式中,h为圆锥喷管顶点到坐标原点的距离,k>0为常数;(x,y)为喷管模型内表面任意点的坐标;
9.2)判断飞行器点云模型在XOZ平面上的投影是否有点位于喷管模型内,若是,则预测结果为有碰撞风险,否则,预测结果为无碰撞风险。
飞行器点云模型与喷管在XOZ平面的投影具有重叠部分,并不判断三维空间中是否重叠。喷管本身为圆锥,其投影为一梯形,即判定飞行器点云模型在XOZ平面投影是否有点在该梯形内部。
步骤9)中,利用飞行器点云模型进行碰撞预测前,根据飞行器部件之间碰撞预测的阈值,对飞行器点云模型进行放缩。
步骤9)中,利用飞行器点云模型进行碰撞预测后,将预测结果返回给飞行器的运动控制系统;
所述运动控制系统根据预测结果生成飞行器的运动决策,进而控制飞行器运动。
实施例2:
参见图1至图5,多体分离试验中基于简化点云模型的碰撞预测方法,包括以下步骤:
步骤1,将多体分离试验的三维模型导入计算机,利用PCL内置的pcl_mesh_sampling算法生成预设点数的点云模型。
步骤2,选定模型特征靶点,利用PCL内置的obj2pcd算法提取特征靶点坐标数据。
步骤3,将特征靶点坐标数据插入到步骤1生成的点云模型中,获取特征点云模型。
步骤4,进行多体分离试验。标定空间坐标系,视觉定位传感器获取实体模型特征靶点的空间坐标。
步骤5,系统根据采集到的气动力数据解算出飞行器模型下一时刻位姿。
步骤6,利用SVD(Singular Value Decomposition)算法实现点云模型到下一时刻位姿的匹配。
步骤7,根据点云模型在风洞试验段中的位姿对点云模型进行局部保留。
步骤8,放缩试验段设备模型,根据点面关系进行碰撞预测,为后续的运动提供决策依据。
在步骤1中,根据试验模型的表面积选择合适的点云数目,若点云数目较多,后续数据处理时间增加;反之,不能有效地进行碰撞预测。
在步骤2中,选取三组或三组以上实物模型的边缘点作为其特征靶点。
在步骤4中,标定的目的是保证点云模型和风洞试验段各设备模型之间的相对位姿完全一致,为保证获取到实体模型特征靶点的空间坐标,应考虑合适的视觉定位传感器数目及其布置方式。
在步骤5中,气动力数据是由实体模型上的测力天平测量得到的。
在步骤6中,通过点云模型与实体模型特征靶点的对应关系,利用SVD算法实现点云模型到下一时刻姿态的匹配。
在步骤7中,根据点云模型的位姿情况对其进行简化,仅保留重叠部分点云数据,提升后续碰撞预测时效性。
在步骤8中,考虑部件之间碰撞预测的阈值,将试验段设备模型进行一定比例的放缩。
实施例3:
参见图1至图5,多体分离试验中基于简化点云模型的碰撞预测方法的试验,包括以下内容:
试验对象:
图1a图是风洞中的实物模型,其中1是多级分离试验中的喷管,在本实例中为机构运行的障碍物。2是多级分离试验中的实物模型,其安装在执行机构3的末端。执行机构3末端具有六个自由度,能实现模型沿三个轴的平动与转动。b是依据a中的实物模型建立的点云模型,且该点云模型已匹配到气动解算出的下一时刻位姿,4是喷管内壁的曲面模型,5是经过简化的点云模型,点云模型的显示技术基于开放的C++编程库PCL。
碰撞预测方法的具体内容如下:
在进行多级分离试验之前,将多体分离试验的三维模型导入计算机中,根据三维模型的表面积选定合适的点云数目,通过PCL内置的pcl_mesh_sampling算法生成预设点数的点云模型。虽然上述点云模型的点云数目能够自行控制,但是该算法不能保证生成模型边缘对应的数据点,而在视觉定位过程中通常选择模型的边缘点作为其特征靶点,故后续特征靶点的选择与匹配难以实现。PCL内置的obj2pcd算法能够将obj格式的三维模型直接转化为点云模型,该算法能够生成模型边缘对应的数据点,但是不能控制生成模型的点云数目。为得到预设点数、具有特征靶点的点云模型,提取obj2pcd算法生成点云模型中的特征靶点并插入到pcl_mesh_sampling算法生成的点云模型中,其流程如图2所示。
通过视觉定位传感器获取实体模型的特征靶点空间坐标,系统根据采集得到的气动力数据解算出模型的下一时刻位姿,通过SVD算法,利用至少三对点的坐标关系,即可实现点云模型到下一时刻位姿的匹配。SVD算法的分解矩阵原理如下:
W=XYZ
式中,W为任意给定的m×n的矩阵,即两对应坐标集合之间的协方差矩阵;X为m阶正交矩阵,Y为由降序排列的非负的对角线元素组成的m×n矩形对角矩阵,Z
求W
W
求WWT的特征向量得到矩阵X:
WW
求W
经过上述计算过程,即可实现任意矩阵的SVD分解,理论上只需要三对点的坐标即可计算出转换矩阵,点对越多,计算得到的转换矩阵越精确。通过所求转换矩阵,依次将点云模型中的点坐标转换到实际空间坐标系中,其计算过程如下:
式中,P
通过上述SVD方法获得矩阵W的X、Y和Z,进一步地解算出旋转矩阵R。
[X,Y,Z]=SVD(W)(6)
R=ZX
式(6)中,W为P
通过旋转矩阵R计算出平移矩阵t,进而可实现点云模型的匹配。
t=-R×μ
实现点云模型的匹配之后,根据其位置与姿态对点云模型进行简化,保留与喷管模型重叠的部分。本发明的特征点云模型匹配与简化流程如图3所示。
按一定比例对喷管模型进行放缩,作为碰撞预测的安全阈值。风洞试验段中喷管为圆锥状,以喷管末端面中心为原点,沿喷管朝向试验段内部为Z轴正向,竖直向上为Y轴正向,X轴方向由右手定则确定。喷管模型内表面可表示为:
x
式中,h为圆锥顶点到坐标原点的距离,k>0为常数。
圆锥面可看成半径不同的圆叠加而成,对于Z值不同的XOY面,判定点云模型中是否有点处于圆外,若存在,即有碰撞风险,若不存在,则无碰撞风险。本发明的碰撞预测方法原理如图4。
至此,完成多体分离试验的碰撞预测,本发明提出的碰撞预测流程如图5。
实施例4:
多体分离试验中基于简化点云模型的碰撞预测方法,包括以下步骤:
1)获取所述飞行器三维模型。
2)对所述飞行器三维模型进行处理,生成预设点数的飞行器点云模型;
3)选定模型特征靶点,提取飞行器特征靶点的坐标数据;
4)将特征靶点的坐标数据插入到飞行器点云模型中,从而生成特征点云模型;
5)进行多体分离试验,标定空间坐标系,利用视觉定位传感器获取飞行器实体模型特征靶点的空间坐标;
6)采集飞行器实体模型的气动力数据,并根据气动力数据和特征靶点空间坐标解算飞行器实体模型下一时刻位姿;
7)利用SVD算法对飞行器点云模型和下一时刻的飞行器实体模型进行匹配,得到位姿转换后的飞行器点云模型;
8)对位姿转换后的飞行器点云模型进行简化;
9)利用飞行器点云模型进行碰撞预测。
实施例5:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4,进一步的,对飞行器三维模型进行处理的方法包括PCL内置的pcl_mesh_sampling算法。
实施例6:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-5任一项,进一步的,提取飞行器特征靶点坐标数据的方法包括PCL内置的obj2pcd算法。
实施例7:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-6任一项,进一步的,所述特征靶点包括飞行器三维模型的若干边缘点。
实施例8:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-7任一项,进一步的,气动力数据的测量装置包括飞行器实体模型上的测力天平。
实施例9:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-8任一项,进一步的,步骤7)中,位姿转换后飞行器点云模型的坐标矩阵A'如下所示:
A'=TA (1)
式中,A为坐标转换前飞行器点云模型的坐标矩阵;T为坐标转换矩阵。
实施例10:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-9任一项,进一步的,步骤8)中,对飞行器点云模型进行简化的方法包括:保留飞行器点云模型和多体分离试验喷管模型重叠的部分。
实施例11:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-10任一项,进一步的,步骤9)中,利用飞行器点云模型进行碰撞预测的步骤包括:
9.1)建立多体分离试验喷管模型的内表面表达式,即:
x
式中,h为圆锥喷管顶点到坐标原点的距离,k>0为常数;(x,y)为喷管模型内表面任意点的坐标;
9.2)判断飞行器点云模型在XOZ平面上的投影是否有点位于喷管模型内,若是,则预测结果为有碰撞风险,否则,预测结果为无碰撞风险。
实施例12:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-11任一项,进一步的,步骤9)中,利用飞行器点云模型进行碰撞预测前,根据飞行器部件之间碰撞预测的阈值,对飞行器点云模型进行放缩。
实施例13:
多体分离试验中基于简化点云模型的碰撞预测方法,技术内容同实施例4-12任一项,进一步的,步骤9)中,利用飞行器点云模型进行碰撞预测后,将预测结果返回给飞行器的运动控制系统;
所述运动控制系统根据预测结果生成飞行器的运动决策,进而控制飞行器运动。
- 级间分离试验中基于点云简化算法的主体和分离体碰撞预测方法
- 基于简化碰撞辐射模型的氩气等离子体电子密度计算方法