一种无人机着陆引导平台及方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及无人机技术领域,具体是一种无人机着陆引导平台及方法。
背景技术
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。无人机已经广泛应用于侦察、监视、目标定位、目标毁伤评估、电子对抗、通信中继等诸多领域。
无人机着陆时需要有稳定的着陆引导平台,避免地面不平造成无人机降落不稳定,对无人机造成损伤,影响无人机的使用,同时在户外无人机飞行时,需要定时的对无人机进行检修或充电等操作。为此,我们提出一种无人机着陆引导平台及方法。
发明内容
本发明的目的在于提供一种无人机着陆引导平台及方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种无人机着陆引导平台,包括防护机罩和着陆引导架,所述防护机罩内设有用于收纳着陆引导架的防护腔;
所述着陆引导架包括支撑板和着陆板,所述支撑板和着陆板之间连接若干个阻尼减震器,所述着陆板上安装有用于对无人机固定的固定机构;
所述支撑板一侧连接可在防护腔内滑动的移动板,所述防护机罩上安装有用于驱动移动板滑动调节位置的传动机构;
所述支撑板顶部连接有若干个定位器,所述支撑板底部连接有可折叠收纳的支撑机构,用于对支撑板进行支撑固定;
所述防护机罩底部连接四组支腿,所述支腿底部安装万向轮,所述防护机罩底部安装有用于对防护机罩位置固定的定位机构。
在一种可选方案中:所述固定机构包括弧形板,所述弧形板一侧连接齿圈,所述着陆板底部连接弧形套,所述弧形套内设有用于弧形板和齿圈滑动的弧形滑动槽,所述着陆板上设有与弧形滑动槽连通的弧形槽,所述着陆板底部安装有用于驱动齿圈在弧形滑动槽内滑动调节位置的调节件。
在一种可选方案中:所述调节件包括与齿圈内壁啮合的齿轮,所述着陆板底部安装有用于驱动齿轮转动的调节电机。
在一种可选方案中:所述传动机构包括安装在防护机罩外壁的传动电机,所述防护腔内安装两组传动丝杆,所述传动丝杆轴端与传动电机动力输出端的电机轴连接,所述移动板上设有与传动丝杆螺纹配合的螺孔,所述移动板侧壁与防护机罩内壁滑动配合。
在一种可选方案中:所述支撑板靠近移动板一侧的顶部连接导向板,所述导向板顶部连接导向块,所述防护机罩顶板底部设有用于导向块滑动的导向滑槽。
在一种可选方案中:所述防护腔一侧开口处底部设有用于支撑机构通过的开口槽。
在一种可选方案中:所述支撑机构包括支撑架,所述支撑板底部设有与支撑架一端铰接的铰接座A,所述支撑架横杆处铰接电动伸缩杆,所述支撑板底部还连接铰接座B,所述电动伸缩杆远离支撑架一端与铰接座B铰接;所述支撑架底部滑动连接滑杆,所述滑杆底部连接垫块,所述滑杆远离垫块一端连接有安装在支撑架内的弹簧。
在一种可选方案中:所述定位机构包括两组呈对称设置的安装架,所述安装架一端安装定位辊,所述定位辊上连接若干个埋地齿,所述防护机罩底部连接安装座,所述安装架远离定位辊一端与安装座铰接,所述安装架上铰接连杆,所述连杆远离安装架一端铰接调节块,所述防护机罩底部设有用于调节块滑动的调节槽,所述调节槽内安装有与调节块螺纹连接的调节丝杆,所述防护机罩内安装有用于驱动调节丝杆转动的驱动电机,所述调节丝杆上与两组调节块对应的两组螺纹旋向相反。
在一种可选方案中:所述防护腔底部且位于防护机罩内设有蓄电部件和控制部件,所述防护机罩外壁处设有与蓄电部件配合的电源接口。
与现有技术相比,本发明的有益效果是:
本发明中着陆引导架可用于无人机的着陆引导,无人机可降落至着陆板上,且阻尼减震器可对着陆板受到的冲击进行缓冲,提高无人机降落稳定性,无人机可通过固定机构进一步固定在着陆板上,利于无人机的稳定停靠;
本发明中支撑机构的设置,可对支撑板进一步支撑,提高着陆引导架的稳定性;
本发明中传动机构的设置,可调节支撑板的位置,利于着陆引导架整体收纳至防护机罩内,利于对无人机着陆时的收纳防护,方便后续对无人机的转运;
本发明中防护机罩内铺设蓄电部件,可用于无人机着陆后的充电等;
本发明中定位机构的设置,方便平台移动后的固定,利于置于户外稳定停放,方便无人机后续的着陆,且防护机罩对无人机收纳后,平台整体便于移动。
附图说明
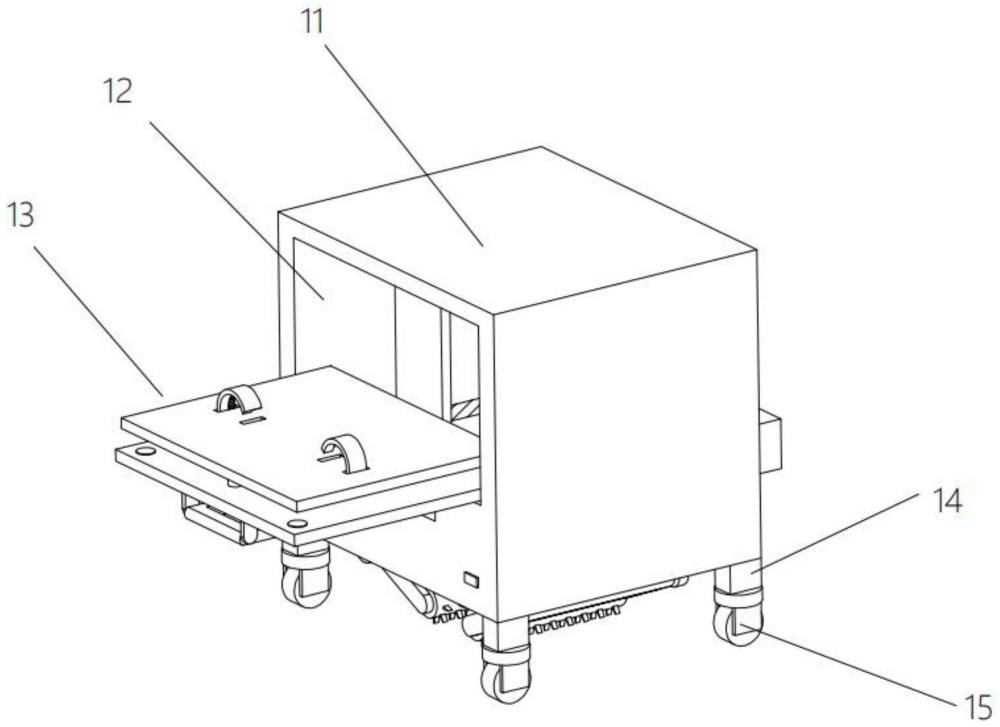
图1为本发明的结构示意图。
图2为本发明中防护机罩的结构示意图。
图3为本发明中着陆引导架的结构示意图。
图4为本发明中弧形套的剖面结构示意图。
图5为本发明中支撑架展开的结构示意图。
图6为本发明中定位机构的结构示意图。
图中:11、防护机罩;12、防护腔;13、着陆引导架;14、支腿;15、万向轮;16、传动电机;17、传动丝杆;18、开口槽;19、支撑板;20、阻尼减震器;21、着陆板;22、弧形套;23、调节电机;24、弧形板;25、齿圈;26、齿轮;27、弧形槽;28、移动板;29、导向板;30、导向块;31、定位器;32、支撑架;33、滑杆;34、垫块;35、电动伸缩杆;36、安装座;37、安装架;38、定位辊;39、埋地齿;40、连杆;41、调节块;42、调节丝杆。
具体实施方式
请参阅图1-图6,本发明实施例中,一种无人机着陆引导平台,包括防护机罩11和着陆引导架13,所述防护机罩11内设有用于收纳着陆引导架13的防护腔12;
如图3所示,所述着陆引导架13包括支撑板19和着陆板21,所述支撑板19和着陆板21之间连接若干个阻尼减震器20,所述着陆板21上安装有用于对无人机固定的固定机构;
所述支撑板19一侧连接可在防护腔12内滑动的移动板28,所述防护机罩11上安装有用于驱动移动板28滑动调节位置的传动机构;
如图5所示,所述支撑板19顶部连接有若干个定位器31,定位器31可用于向无人机发送着陆点坐标,利于引导无人机后续的着陆;所述支撑板19底部连接有可折叠收纳的支撑机构,用于对支撑板19进行支撑固定;
如图1所示,所述防护机罩11底部连接四组支腿14,所述支腿14底部安装万向轮15,所述防护机罩11底部安装有用于对防护机罩11位置固定的定位机构;
在本实施例中,防护机罩11移动至目标位置,之后使用定位机构固定防护机罩11的位置;
通过传动机构将支撑板19移出至防护腔12一侧,支撑机构展开对支撑板19支撑;
无人机着陆时,可通过定位器31进行定位,引导无人机停靠至着陆板21顶部,之后使用固定机构对无人机固定;
传动机构工作可移动支撑板19,支撑板19移动同时带动无人机收纳至防护腔12内。
在一个实施例中,如图3和图4所示,所述固定机构包括弧形板24,所述弧形板24一侧连接齿圈25,所述着陆板21底部连接弧形套22,所述弧形套22内设有用于弧形板24和齿圈25滑动的弧形滑动槽,所述着陆板21上设有与弧形滑动槽连通的弧形槽27,所述着陆板21底部安装有用于驱动齿圈25在弧形滑动槽内滑动调节位置的调节件;
调节件驱动齿圈25转动,由于弧形套22的限制,齿圈25绕其轴线转动调节位置,无人机着陆时,弧形板24和齿圈25收纳在弧形滑动槽和弧形槽27内,之后无人机着陆至着陆板21后,弧形板24和齿圈25转动,可对无人机支架中底杆进行限位。需要注意的是,实际使用中,固定机构根据无人机支架的尺寸进行位置设置。
在一个实施例中,如图3和图4所示,所述调节件包括与齿圈25内壁啮合的齿轮26,所述着陆板21底部安装有用于驱动齿轮26转动的调节电机23;调节电机23工作,可驱动齿轮26转动,从而驱动齿圈25转动,弧形板24和齿圈25在弧形滑动槽和弧形槽27内调节位置。
在一个实施例中,如图2所示,所述传动机构包括安装在防护机罩11外壁的传动电机16,所述防护腔12内安装两组传动丝杆17,所述传动丝杆17轴端与传动电机16动力输出端的电机轴连接,所述移动板28上设有与传动丝杆17螺纹配合的螺孔,所述移动板28侧壁与防护机罩11内壁滑动配合;传动电机16工作,可驱动传动丝杆17转动,从而驱动移动板28在防护腔12内调节位置。
在一个实施例中,如图5所示,所述支撑板19靠近移动板28一侧的顶部连接导向板29,所述导向板29顶部连接导向块30,所述防护机罩11顶板底部设有用于导向块30滑动的导向滑槽;导向板29的设置,提高着陆引导架13移动稳定性,着陆引导架13移动时,导向块30在导向滑槽内滑动。
在一个实施例中,如图2所示,所述防护腔12一侧开口处底部设有用于支撑机构通过的开口槽18;方便支撑机构通过。
在一个实施例中,如图5所示,所述支撑机构包括支撑架32,所述支撑板19底部设有与支撑架32一端铰接的铰接座A,所述支撑架32横杆处铰接电动伸缩杆35,所述支撑板19底部还连接铰接座B,所述电动伸缩杆35远离支撑架32一端与铰接座B铰接;所述支撑架32底部滑动连接滑杆33,所述滑杆33底部连接垫块34,所述滑杆33远离垫块34一端连接有安装在支撑架32内的弹簧;
电动伸缩杆35伸缩,可调节支撑架32绕铰接座A翻转调节角度,滑杆33和弹簧的设置,提高支撑架32对不平整路面的适应性。
在一个实施例中,如图6所示,所述定位机构包括两组呈对称设置的安装架37,所述安装架37一端安装定位辊38,所述定位辊38上连接若干个埋地齿39,所述防护机罩11底部连接安装座36,所述安装架37远离定位辊38一端与安装座36铰接,所述安装架37上铰接连杆40,所述连杆40远离安装架37一端铰接调节块41,所述防护机罩11底部设有用于调节块41滑动的调节槽,所述调节槽内安装有与调节块41螺纹连接的调节丝杆42,所述防护机罩11内安装有用于驱动调节丝杆42转动的驱动电机,所述调节丝杆42上与两组调节块41对应的两组螺纹旋向相反;
防护机罩11移动至目标位置后,可通过驱动电机控制调节丝杆42工作,之后调节块移动,可通过连杆40调节安装架37翻转角度,定位辊38带动埋地齿39接触地面,可起到定位作用。
在一个实施例中,所述防护腔12底部且位于防护机罩11内设有蓄电部件和控制部件,所述防护机罩11外壁处设有与蓄电部件配合的电源接口;电源接口方便无人机的充电。
本发明的工作原理是:防护机罩11移动至目标位置,可通过驱动电机控制调节丝杆42工作,之后调节块移动,可通过连杆40调节安装架37翻转角度,定位辊38带动埋地齿39接触地面,固定防护机罩11的位置;
传动电机16工作,可驱动传动丝杆17转动,从而驱动移动板28在防护腔12内调节位置,支撑板19移出至防护腔12一侧,电动伸缩杆35伸长,支撑架32绕铰接座A翻转调节角度,支撑架32展开对支撑板19支撑;
无人机着陆时,可通过定位器31进行定位,引导无人机停靠至着陆板21顶部,之后驱动齿轮26转动,从而驱动齿圈25转动,弧形板24和齿圈25在弧形滑动槽和弧形槽27内调节位置,可对无人机支架中底杆进行限位;
传动机构工作可移动支撑板19,支撑板19移动同时带动无人机收纳至防护腔12内。
- 一种无人机用海上着陆平台及无人机着陆的控制方法
- 一种无人机用海上着陆平台及无人机着陆的控制方法