基于边缘计算与电池能量可控的无人机路径优化方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及无线通信技术领域,特别涉及基于边缘计算与电池能量可控的无人机路径优化方法。
背景技术
随着5G技术的普及,移动通信的速度、容量、延迟等指标得到了更大程度的提升和优化,使得更多的设备能够通过无线网络实现高速、可靠、低延迟的连接。在此背景下,物联网(IoT)应运而生,将各类设备、传感器、物品等连接到互联网上,并通过数据交互和智能化处理,实现更加高效、智能的生产、管理和服务等应用。
然而,随着物联网设备数量的增多,产生的数据量呈指数级增长。物联网常常依靠云计算技术协同处理数据,但是由于云计算数据中心与物联网设备的地理位置距离较远,面临着在大数据量背景下产生的处理队列积压、传输延迟高等问题,无法满足针对大量物联网设备产生的数据快速处理的要求,因此需要处理速度更快、延迟更低的方法。于是,一种新兴的计算概念,移动边缘计算便产生了。
移动边缘计算在用户附近的网络边缘端架设服务器,不仅能够保证用户数据的安全性和隐私性,还能够有效地降低网络延迟和数据传输的时间,从而提升用户的体验。使用无人机搭载边缘计算服务器,可以同时提供计算和通信服务,提供临时数据处理服务或建立临时通信信道,例如无人机作为通信基站可以快速达到偏远的受灾地区部署,提供紧急通信支持。
无人机搭载边缘计算服务器的新兴架构,为各种应用场景带来了灵活性和高效性,但同时也受限于能耗问题。由于其电池体积小、载荷能力低、续航能力短,无人机本身的能耗已经成为瓶颈,而搭载服务器后这一问题更加突出。这不仅会影响其续航能力,也会限制无人机所能承担的任务类型和工作时间。因此,无人机的路径优化方案需要考虑无人机的能量消耗问题,保持无人机电池能量的可控性对于提升服务质量和延长无人机的续航时间都具有重要意义。
发明内容
本发明的目的在于提供一种动态任务到达情况下,基于边缘计算与电池能量可控的无人机路径优化方法。
实现本发明目的的技术解决方案为基于边缘计算与电池能量可控的无人机路径优化方法,具体包括以下步骤:
步骤1,建立无人机搭载边缘计算服务器服务地面用户的系统模型;
步骤2,建立用户端和无人机边缘服务器端的任务积压队列;
步骤3,建立无人机的电池能量队列,并初始化为无人机携带电池能量的值;
步骤4,为步骤2和步骤3中的所有队列建立李雅普诺夫优化函数,在任务队列稳定和无人机能量队列稳定的约束下,建立使得用户的时间平均能耗总和最小化的优化问题,利用李雅普诺夫函数的性质,将优化问题分解为在每个时隙内确定的李雅普诺夫优化问题;
步骤5,根据需要的迭代精度,设置迭代结束的阈值;
步骤6,利用块坐标下降法在每个时隙分别优化用户计算频率,用户关联和无人机的路径;
步骤7,重复步骤6,将得到的结果作为下一次优化的初始值,直到迭代变量小于迭代的阈值;
步骤8,重复步骤6和步骤7,同时更新所有队列的值,直至所有时隙均优化完成。
可选的,建立无人机搭载边缘计算服务器服务地面用户的系统模型,包括:
步骤1-1,定义地面用户参数,定义地面用户参数包括:
定义地面用户的数量为K,用户的位置在一个二维坐标平面上随机分布为z
步骤1-2,定义无人机参数:无人机参数包括:
定义无人机一个任务周期为
无人机的飞行高度为常数H,在任何时隙中的最大速度为ν
步骤1-3,建立无人机与用户之间的数据传输模型:
设α
在每个时隙,无人机以时分多址方式与用户进行通信;在单个时隙内,无人机至多和一个用户建立连接,限制条件为:
在时隙t,用户k与无人机之间的上传速率为:
其中p
可选的,建立用户端和无人机边缘服务器端的任务积压队列,包括:
步骤2-1,建立用户端的任务积压队列:
步骤2-1-1,定义在第t个时隙开始时,大小为a
步骤2-1-2,在每个时隙的开始,用户进行选择将任务卸载到无人机或由用户自身的处理器进行本地计算;
对于本地计算的任务,定义
其中ζ
步骤2-1-3,为每个用户建立一个任务积压队列
其中
步骤2-2,建立无人机边缘服务器端的任务积压队列:
步骤2-2-1,定义无人机的边缘计算服务器在第t个时隙向每个用户提供服务的CPU频率为一个随机值,在整个时隙,定义提供服务的CPU频率最小值为
服务器在第t时隙内为用户k处理的任务量为:
步骤2-2-2,在每个时隙,用户k上传其计算任务
对于用户k,无人机端下一时隙任务队列为:
其中无人机端每个时隙处理的任务量满足
可选的,建立无人机的电池能量队列,并初始化为无人机携带电池能量的值,包括:
步骤3-1,建立无人机搭载的服务器计算能耗:
其中服务器在时隙t为用户k消耗的计算能量为
步骤3-2,建立无人机的飞行能耗:
定义每个时隙的无人机的飞行能量为e
无人机通过铺设在机翼上的光伏板吸收太阳能充电,无人机在每个时隙吸收的能量设定为在一定范围内上下波动的一个随机值,定义无人机在所有时隙吸收的能量最小值为
建立无人机的下一时隙的电池储能队列为:
步骤3-3,将无人机第一个时隙的电池储能初始化为无人机携带电池的能量的值。
可选的,为步骤2和步骤3中的所有队列建立李雅普诺夫优化函数,在任务队列稳定和无人机能量队列稳定的约束下,建立使得用户的时间平均能耗总和最小化的优化问题。并且利用李雅普诺夫函数的性质,将优化问题分解为在每个时隙内确定的李雅普诺夫优化问题,包括:
步骤4-1,定义李雅普诺夫函数为:
其中
步骤4-2,定义李雅普诺夫漂移惩罚函数为:
其中,
步骤4-3,构造一个问题
步骤4-4,根据推导得到,Δ
将问题
可选的,利用块坐标下降法在每个时隙分别优化用户计算频率,用户关联和无人机的路径,包括:
步骤6-1,将问题
步骤6-2,初始化迭代次数r=0,初始化无人机初始路径
步骤6-3,优化每个用户在时隙t的用户关联和无人机的路径:
步骤6-3-1,利用块坐标下降法,将优化用户关联和无人机的路径分解为优化用户关联问题、以及优化无人机路径问题;
步骤6-3-2,将整数变量α
步骤6-3-3,优化无人机的路径:设置一个能源消耗调整参数θ,作为无人机电池能量的控制值;在优化目标中,定义权重参数V
s.t.α
ν(t)≤ν
步骤6-3-4,根据给出的优化轨迹w
步骤6-3-5,根据给出的用户关联变量α
步骤6-3-5-1,判断M
步骤6-3-5-2,判断θ-E(t)相较于0的大小:在整个周期,当无人机电池能量积压较低时,满足θ-E(t)>0,
当θ-E(t)>0时,引入松弛变量U
由于上述不等式的右端关于U
当θ-E(t)>0时,优化无人机路径时将限制条件
当θ-E(t)<0时,引入另一个松弛变量K
将不等式右端的一阶泰勒展开式作为下界,设其下界函数为Z
当θ-E(t)<0时,在优化无人机路径时将限制条件
本申请提供的方法中无人机搭载边缘计算服务器且与服务用户之间进行通信,采用的通信方式为时分多址,可以将计算任务动态地卸载无人机上,以降低服务时延保证用户的服务质量。本申请对无人机的飞行路径进行了路径优化,优化的目标是最小化用户的能耗。在无人机飞行过程中,采用电池能量控制的方法,使得太阳能充电的能量与消耗的能量保持平衡。并且引入了基于空气动力学的无人机飞行能耗模型,模拟无人机在实际飞行中的能耗。本申请能够达到任务队列的稳定,即用户与无人机之间延迟局限于一定范围内,并且可以实现对无人机电池能量的有效控制。
附图说明
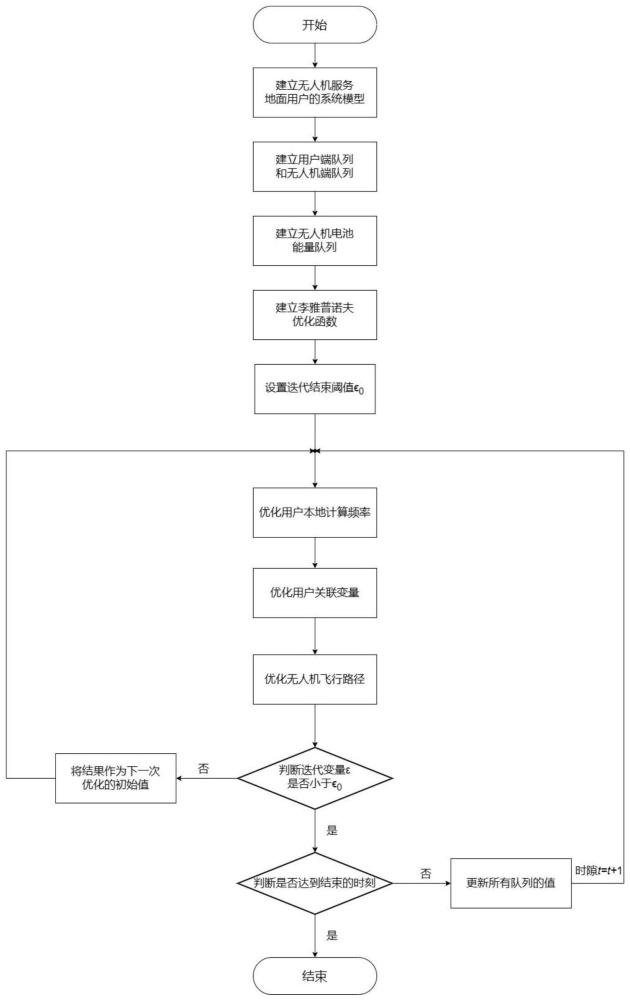
图1是本发明基于边缘计算与电池能量可控的无人机路径优化方法的流程图。
图2是本申请实施例中基于边缘计算与电池能量可控的无人机路径优化算法仿真的结果图。
图3是本申请实施例中所有用户在所有时隙的任务队列以及无人机端为用户建立的任务队列仿真结果图。
图(a)为用户端任务队列随时隙变化的仿真结果图,图(b)为无人机端为用户建立的任务队列随时隙变化的仿真结果图。
图4是本申请实施例中无人机电池能量队列随时隙变化的仿真结果图。
具体实施方式
如图1所示,本发明提供了一种基于边缘计算与电池能量可控的无人机路径优化方法,包括以下步骤:
步骤1,建立无人机搭载边缘计算服务器服务地面用户的系统模型;
步骤2,建立用户端和无人机边缘服务器端的任务积压队列;
步骤3,建立无人机的电池能量队列,并初始化为无人机携带电池能量的值;
步骤4,为步骤2和步骤3中的所有队列建立李雅普诺夫优化函数,在任务队列稳定和无人机能量队列稳定的约束下,建立使得用户的时间平均能耗总和最小化的优化问题。并且利用李雅普诺夫函数的性质,将优化问题分解为在每个时隙内确定的李雅普诺夫优化问题;
步骤5,根据需要的迭代精度,设置迭代结束的阈值;
步骤6,利用块坐标下降法在每个时隙分别优化用户计算频率,用户关联和无人机的路径。
步骤7,重复步骤6,将得到的结果作为下一次优化的初始值,直到迭代变量小于迭代的阈值;
步骤8,重复步骤6和步骤7,同时更新所有队列的值,直至所有时隙均优化完成。
步骤1中,建立无人机搭载边缘计算服务器服务地面用户的系统模型,具体包括:
步骤1-1,定义地面用户参数,定义地面用户参数包括:
定义地面用户的数量为K,用户的位置在一个二维坐标平面上随机分布为z
步骤1-2,定义无人机参数。无人机参数包括:
定义一个任务周期为
无人机的飞行高度为常数H,在任何时隙中的最大速度为ν
步骤1-3,建立无人机与用户之间的数据传输模型:
设α
在每个时隙,无人机以时分多址方式(TDMA)与用户进行通信;在单个时隙内,无人机至多和一个用户建立连接,限制条件为:
在时隙t,用户k与无人机之间的上传速率(bits/s/Hz)为:
其中p
步骤2中,建立用户端和无人机边缘服务器端的任务积压队列,具体包括:
步骤2-1,建立用户端的任务积压队列:
步骤2-1-1,定义在第t个时隙开始时,大小为a
步骤2-1-2,在每个时隙的开始,用户进行选择将任务卸载到无人机或由用户自身的处理器进行本地计算;
对于本地计算的任务,定义
其中ζ
步骤2-1-3,为每个用户建立一个任务积压队列
其中
步骤2-2,建立无人机边缘服务器端的任务积压队列:
步骤2-2-1,定义无人机的边缘计算服务器在第t个时隙向每个用户提供服务的CPU频率为一个随机值,在整个时隙,定义提供服务的CPU频率最小值为
服务器在第t时隙内为用户k处理的任务量为:
步骤2-2-2,在每个时隙,用户k上传其计算任务
对于用户k,无人机端下一时隙任务队列为:
其中无人机端每个时隙处理的任务量满足
步骤3所述,建立无人机的电池能量队列,并初始化为无人机携带电池能量的值,具体包括:
步骤3-1,建立无人机搭载的服务器计算能耗:
其中服务器在时隙t为用户k消耗的计算能量为
步骤3-2,建立无人机的飞行能耗:
对于无人机飞行消耗的能量,本文引入了基于空气动力学理论的计算模型。定义每个时隙的无人机的飞行能量为e
本发明中无人机可以通过铺设在机翼上的光伏板吸收太阳能充电,而充电功率受飞行高度和天气的影响。由于本文中无人机的飞行高度不变,无人机在每个时隙吸收的能量设定为在一定范围内上下波动的一个随机值,定义无人机在所有时隙吸收的能量最小值为
建立无人机的下一时隙的电池储能队列为:
步骤3-3,将无人机第一个时隙的电池储能初始化为无人机携带电池的能量的值。
步骤4所述,为步骤2和步骤3中的所有队列建立李雅普诺夫优化函数,在任务队列稳定和无人机能量队列稳定的约束下,建立使得用户的时间平均能耗总和最小化的优化问题。并且利用李雅普诺夫函数的性质,将优化问题分解为在每个时隙内确定的李雅普诺夫优化问题,具体包括:
步骤4-1,定义李雅普诺夫函数为:
其中
步骤4-2,定义李雅普诺夫漂移惩罚函数为:
其中,
步骤4-3,构造一个问题
步骤4-4,根据推导得到,Δ
因此,将问题
步骤6,利用块坐标下降法在每个时隙分别优化用户计算频率,用户关联和无人机的路径。具体包括:
步骤6-1,将问题
步骤6-2,初始化迭代次数r=0,初始化无人机初始路径
步骤6-3,优化每个用户在时隙t的用户关联和无人机的路径:
步骤6-3-1,利用块坐标下降法,将优化用户关联和无人机的路径分解为优化用户关联问题、以及优化无人机路径问题;
步骤6-3-2,将整数变量α
步骤6-3-3,优化无人机的路径:设置一个能源消耗调整参数θ,作为无人机电池能量的控制值;在优化目标中,定义权重参数V
s.t.α
ν(t)≤ν
步骤6-3-4,根据给出的优化轨迹w
步骤6-3-5,根据给出的用户关联变量α
步骤6-3-5-1,判断M
步骤6-3-5-2,判断θ-E(t)相较于0的大小:在整个周期,当无人机电池能量积压较低时,满足θ-E(t)>0,
当θ-E(t)>0时,引入松弛变量U
由于上述不等式的右端关于U
当θ-E(t)>0时,优化无人机路径时将限制条件
当θ-E(t)<0时,引入另一个松弛变量K
将不等式右端的一阶泰勒展开式作为下界,设其下界函数为Z
当θ-E(t)<0时,在优化无人机路径时将限制条件
实施例
本实例的具体条件为:时隙数目N设置为10000,用户的数量K设置为4,无人机的初始位置为(0,0),用户的位置z
图2为基于边缘计算与电池能量可控的无人机路径优化算法仿真的结果图。从中可以看出,初始阶段无人机快速飞行至所有用户的中心以提高任务上传速率,接收更多来自用户卸载的任务。然后无人机在用户中心附近飞行,以维持用户端的队列稳定和无人机端的队列稳定。
图3为所有用户在所有时隙的任务队列以及无人机为该用户建立的任务队列仿真结果图。从图中可以得到,用户端和无人机端的任务队列都是先增加然后随着时隙计数值t的增加而趋于稳定的。证明了本发明所提出的路径优化算法可以有效保持所有任务队列的稳定。
图4为无人机电池能量队列随时隙变化的仿真结果图。由图可知,由于无人机的初始能量高于设置的能量控制值θ,无人机的能量先降低然后在设定的值θ附近波动,趋于稳定。证明了本发明所提出的路径优化算法能有效控制无人机电池能量。
考虑无人机为K个地面用户提供计算服务,用户的位置坐标为z
设无人机和用户之间的信道是视距信道,在时隙t,用户k与无人机之间的上传速率(bits/s/Hz)为
在用户端,本发明为每个用户创建一个任务积压队列
同样地,定义
对于无人机而言,能量消耗由两部分组成,分别是搭载的服务器计算能耗和无人机本身的飞行能耗。其中服务器在时隙t为用户k消耗的计算能量为
本申请中无人机可以通过铺设在机翼上的光伏板吸收太阳能充电,而充电功率受飞行高度和天气的影响。由于本发明中定义无人机的飞行高度不变,无人机在每个时隙吸收的能量可以设定为在一定范围内上下波动的一个随机值,即
对于地面用户而言,能量消耗分别由用户本地计算能耗和数据传输能耗组成。因为数据传输能耗远远小于本地计算能耗,本发明中只考虑了用户的本地计算能耗。定义
- 基于移动边缘计算与微波能量传输的无人机资源分配及轨迹优化方法
- 基于无人机无线能量传输的边缘计算系统能耗优化方法