具有一体化摄像头的多功能外后视镜
文献发布时间:2023-06-19 09:29:07
技术领域
本发明整体涉及一种车用外后视镜,尤其涉及一种具有一体化成像装置的后视镜模块。
发明内容
在本公开的一个方面,公开了一种车用多用途外后视镜模块。模块包括被配置成捕获图像数据的图像传感器和设置在侧部的反射面。壳体被配置成支撑与车辆相连的反射面和图像传感器。致动器被配置成调节反射面围绕调节轴的取向。控制器与图像传感器和致动器通信。控制器被配置成控制致动器以调节反射面围绕调节轴的取向。
在本公开的另一方面,公开了一种用于控制车用外后视镜总成的方法。方法包括将在第一取向上围绕调节轴的后视镜总成定向以及将后视镜总成的第一表面暴露在由车辆前向运动生成的气流方向上。方法还包括控制后视镜总成在第二取向上围绕调节轴旋转至少60度以及将后视镜总成的第二表面暴露在由车辆前向运动生成的气流方向上。第二表面包括至少比第一表面小10%的前区。
在本公开的另一方面,公开了一种车用外后视镜模块。模块包括被配置成捕获图像数据的图像传感器和后视镜总成,后视镜总成包括被配置成支撑反射元件和图像传感器的壳体。致动器被配置成调节相对于车辆围绕调节轴的后视镜总成的取向。控制器与图像传感器和致动器通信。控制器被配置成控制致动器以调节反射元件围绕调节轴从第一取向到第二取向的取向。第一取向包括将后视镜总成的第一表面相对于车辆的前向操作定向为正面。第二取向包括将后视镜总成的第二表面定向为正面。第二表面包括相对于第一表面的降低的阻力系数。
参考以下说明书、权利要求书和附图,所属领域的技术人员将进一步理解和了解本发明的这些和其他特征、优点和目的。
附图说明
在附图中,
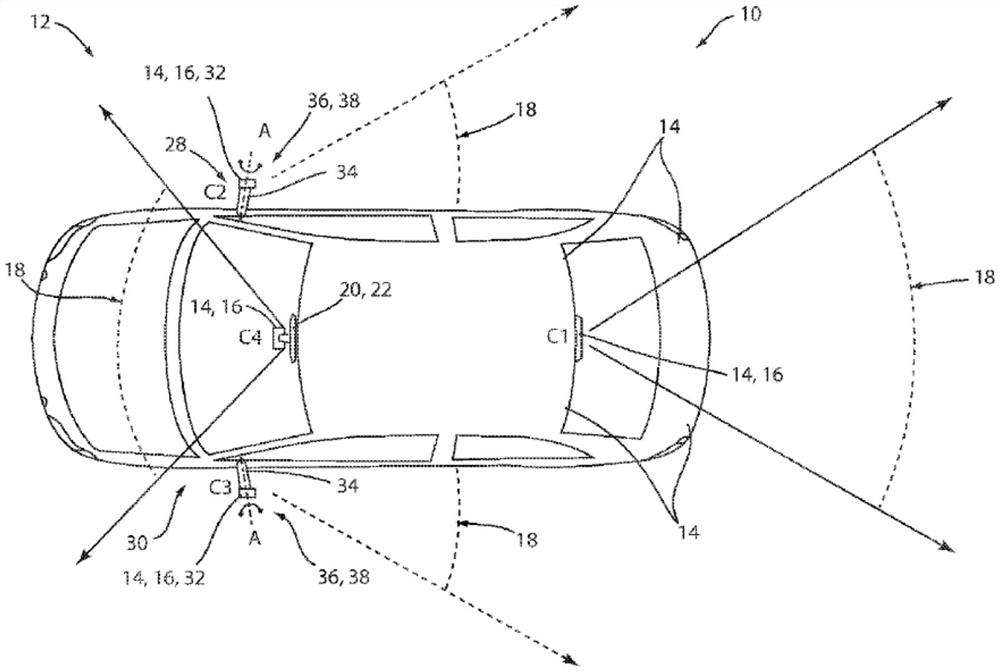
图1为包括成像系统的车辆的俯视图;
图2A为包括被配置在第一配置中的成像装置的外后视镜的示意图;
图2B为包括被配置在第二配置中的成像装置的外后视镜的示意图;以及
图3为根据本公开的成像系统的框图。
具体实施方式
要理解,除了相反的明确说明,本文中公开的本发明可以采用各种替代定向。还应理解,附图中所示且在下文说明书中描述的具体装置和过程仅仅是所附权利要求书中限定的本发明概念的示例性实施方案。因此,除非权利要求书另外明确陈述,否则与本文中公开的实施方案有关的具体尺寸和其他物理特性不应被视为限制性的。
术语“包括(including)”、“包括(comprises)”、“包括(comprising)”或其任何其他变型旨在涵盖非排它的包含物,使得包括一系列元件的过程、方法、物件或设备不仅仅包含那些元件,而且可包括并未明确地列出的或并非此类过程、方法、物件或设备固有的其他元件。带有“包括……”的要素并不妨碍包括所述要素的过程、方法、制品或设备中存在额外的相同要素。
图1展示了包括成像系统12的车辆10的正视图。成像系统12可以作为车10用外摄像头监控系统(CMS)实施。通常,摄像头监控系统(CMS)可以用来监控车辆的环境以检测在与一个或多个成像装置14相关的图像数据中被识别的不同物体。例如,成像系统12可以作为高级驾驶员警报系统(ADAS)、安全系统、车辆导航系统或其他不同系统的元件实施,该元件可以利用图像数据,有助于车辆操作或安全。因此,可以实施所述成像系统12以适应各种应用。
在一些实施方案中,成像系统12可以包括多个成像装置14。在一些实施方案中,成像系统12可包括多个成像装置14,包括第一成像装置C1、第二成像装置C2、第三成像装置C3和第四成像装置C4。每个成像装置14的图像传感器16可具有聚焦于接近车辆10的环境的视场18。在本文中论述的各个实施方案中,成像装置C1-C4可实施成提供接近车辆10的环境的视图,所述视图可在显示屏20或任何形式的显示装置上显示。显示屏20可以结合在后视显示器22中,与常规后视镜类似地定位,并入内部控制台,或设置在车辆10的各个部分中。
成像装置C1、C2、C3和C4可设置在车辆10上,且被定向成使得成像装置14的每一个视场18指向基本不同的区域。每个成像装置14可以包括被配置成捕获图像数据的任何形式的装置。例如,成像装置14可以被实施为电荷耦合器件(CCD)和互补金属氧化物半导体(CMOS)图像传感器。
第一成像装置C1可居中设置在车辆10的后向部分上,接近车辆10的后挡板或类似区域。在一些实施方案中,成像装置C1可设置成靠近后保险杠和/或中心高位刹车灯(CHMSL)。第二成像装置C2和第三成像装置C3可分别设置在车辆10的乘客侧28和驾驶员侧30上。第二成像装置C2和第三成像装置C3可以被配置成捕获对应于靠近车辆10的侧面区域的环境的图像数据。第四成像装置C4可以被配置成在相对于车辆10的操作方向的前向方向上捕获图像数据。第四成像装置C4可以设置在后视显示器22的壳体或车辆10的任何其他部分中,以捕获车辆10前方的图像数据。
在一些实现方式中,第二成像装置C2和第三成像装置C3可并入在车辆10的侧视镜32中。成像装置C2、C3结合第一成像装置C1可以被配置成捕获与相对于车辆10的前向方向的后向区域对应的图像数据。在一些实施方案中,成像装置14可以被配置成根据特定应用而捕获增大或减小的视角。在一些实施方案中,成像装置14可以被配置成捕获车辆10周围几乎整个环境。
在一个示例性实施方案中,侧视镜32可以被配置作为车辆10的多功能元件。在车辆10操作期间,在图像传感器16的视场18中捕获的图像数据可以在后视显示器22上显示。因此,在车辆10的常规操作期间,侧视镜32的反射面34反映出的视觉信息可以在后视显示器22上显示,以呈现侧视镜32提供的多余的反射信息。因此,侧视镜32可以被配置成用作翼面36或多功能模块38以提高车辆10的空气动力学。这样,侧视镜32可以在一些情况下以常规方式使用,并在其他情况下提供有益的空气动力学效益。
图2A和图2B分别示出了展示第一配置42和第二配置44的侧视镜32的示意图。现参照图1、图2A和图2B,第一配置可以对应作为侧视镜32的操作用模块38的常规布置。在第一配置42中,可以定向模块38,使得反射面34被配置成从车辆10后取向车辆10的操作员反射光。在第二配置44中,模块38可以被定向为翼面36或将车辆10的空气动力学阻力最小化。成像系统12的控制器可以被配置成基于车辆10的操作条件、图像传感器C2和C3的操作功能和/或用户偏好控制模块38的取向。这样,成像系统12可以被配置成选择性地调节模块38的位置以选择性地控制模块38被定位在第一配置42中、第二配置44中或这两种配置之间的不同位置中。
为了调节模块38的位置或取向,系统12可以包括一个或多个致动器46。在一些实施方案中,致动器46可以被配置成围绕箭头所示的调节轴A旋转模块38,箭头围绕轴A标示。因此,致动器46可以以电动机、伺服电机或其他形式的致动器实施,致动器可以用于调节或旋转围绕调节轴A的模块38的取向。这样,系统12的控制器可以选择性地调节取向或模块38以适应所需配置用于操作成像系统12和/或优化车辆10的操作。
为了提供有限的阻力或下压力,每个模块38可以被并入壳体48中。壳体48可以沿高度H远离车辆10延伸宽度W。壳体H可以进一步包括在第一配置42中大致沿车辆长度延伸的深度D。深度D可以明显小于常规侧视镜的深度,使得在第二位置44中安置模块38的阻力最小。因此,模块38的深度D可以明显小于高度H,使得相对于第一位置42,第二位置44的阻力最小。
壳体48可以进一步被配置成定位和支撑图像传感器16。图像传感器16可以在取向上固定或被配置成围绕调节轴A独立旋转。例如,图像传感器16可以与车辆10和壳体48相连,使得模块38和反射面34围绕调节轴A旋转。在一些实施方案中,成像系统12可以被配置成通过实施多个致动器46来独立旋转模块38和图像传感器16,这些致动器被配置成围绕调节轴将模块38和图像传感器16独立定向。
在第一配置42中,模块38可以围绕调节轴A旋转,使得反射面34被配置成从车辆10的后面或后向方向朝车辆10的乘客舱或操作员反射光。即,模块的反射面34可以大致垂直地对准地面或支撑车辆10的操作面。在此配置中,可以设置模块38,使得反射面34映像指向车辆10的操作员。因此,第一配置42可以与对应于侧视镜32的模块38的常规定位相对应。
在第二配置44中,模块38可以被定向为翼面36或将车辆10的阻力最小化。在此配置中,成像系统12的控制器或其他控制器(例如,与车辆总线通信的专用控制器)可以被配置成围绕调节轴A调节或旋转模块38,使得镜面指向或平行于地面或车辆10的操作面。在此配置中,通过控制器设置的模块38的高度H大致平行于地面,以降低与模块38相关的阻力。另外,模块38的深度D可以设置成垂直于车辆10的前向操作方向。在此配置中,相对于高度H,模块38的降低的深度D可以限制与模块38相关的阻力。另外,在一些实施方案中,模块38可以在第一配置42和第二配置44之间旋转以降低或增大模块38提供的阻力或下压力。
如本文所述,第一配置42和第二配置44可以不同或可以被控制成在角度范围内围绕调节轴A旋转侧视镜32。例如,侧视镜32可以在大约60度到120度之间的范围内或在用户所选范围内旋转。在一个示例性实施方案中,相对于第一配置42,与侧视镜32相关的阻力可以围绕调节轴A以多个角度中的一个降低。在此配置44中,后视镜32可以形成指向车辆10的前向操作方向的第一轮廓形状。在此第二配置44中,相对于前向操作方向,后视镜32可以形成指向车辆的前向操作方向的第二轮廓形状。
在不同实现方式中,相对于第一轮廓形状,第二轮廓形状可以在正面区域中小约20-90%。因此,在一些实施方案中,第二配置44中后视镜32的正面区域可以比第一配置42中的正面区域小至少20%、30%、40%或50%。在一些方面,相对于第一配置42,第二配置44中后视镜32的正面区域可以为至少60%、70%和80%或提供甚至进一步的正面区域缩小。另外,基于围绕调节轴A的旋转角度,控制器可以基于用户偏好或车辆10的速度改变与后视镜32或后视镜总成相关的正面区域和/或下压力。如上所述,正面区域可以与车辆10的阻力系数相关并且垂直于前向操作方向。
第一配置42可以由成像系统12的控制器或与成像系统通信的控制器来设置和控制,以响应车辆10的操作条件、用户偏好、图像传感器16的操作条件和/或成像系统12的操作条件。例如,在一些实施方案中,控制器可以为第一配置42设置模块38以响应低于速度阈值的车速。若速度低于速度阈值(例如,70km/h),控制器可以控制模块38设置在第一配置42中。若速度大于速度阈值(例如,70km/h),控制器可以控制模块38设置在第二配置44中。这样,控制器可以调节第二配置44中的模块38以响应车速增加。因此,由于车辆10的速度增加或超过一个或多个速度阈值,控制器可以为第二配置44调节模块38的一个或两个以降低车辆10和模块38的阻力系数。
在一些实施方案中,控制器也可以控制模块38的配置以响应图像传感器16的操作和/或成像系统12的操作条件。例如,若模块38的一个图像传感器16不可操作,控制器可以在第一配置42中维持模块38。同样,若成像系统12检测出故障,控制器可以在整个操作过程中将模块38维持在第一配置42中直至故障解决。这样,控制器可以确保图像传感器16或成像系统12出现故障时,侧视镜32的功能得以维持。
在一些实施方案中,模块38也可以由用户输入来控制以控制配置。例如,基于偏好,用户可以选择性地控制第一配置42和第二配置44之间的模块38的取向。这样,成像系统12可以提供柔性操作,柔性操作可以由操作员定制以将效率、偏好操作或所需外观最大化。如上所述,图像传感器16可以在取向上固定或被配置成围绕调节轴A独立旋转。这样,与每个模块38合并的图像传感器16可以维持独立于第一配置42、第二配置44或围绕调节轴A定向的任意配置中的模块38的取向的后方视野18。
现参照图3,示出了成像系统12的框图。成像系统12可以包括显示屏20。显示屏20可以对应于后视显示器22而且可以以各种显示器类型实施。举例来说,显示屏20可对应于液晶显示器(LCD)、等离子显示器、有机发光二极管(OLED)显示器、场发射显示器(FED)面板或各种其他显示器。显示屏20还可并入扬声器、触觉反馈装置(例如,振动马达)、LED或用于提供输出的各种其他硬件部件。
成像系统12还可包括控制器134。控制器134可包括各种类型的数字和/或模拟控制电路,且可包括微处理器、微控制器、专用集成电路(ASIC)、图形处理单元(GPU),或被配置成执行各种输入/输出、控制、分析和本文中所描述的其他功能的其他电路。在一些实施方案中,控制器134可以是单独的片上系统(SoC),或具有本文中所描述的额外硬件部件的片上系统(SoC)。控制器134可包括存储器136(例如,随机存取存储器、只读存储器、快闪存储器、硬盘存储装置、快闪存储器存储装置、固态驱动器存储器等)。因此,控制器134可以用于控制包括图像传感器16的成像系统12。
存储器136可用于促进如本文中所描述的成像系统12的功能。存储器136可包括计算机代码模块、数据、计算机指令或其他信息,他们可以由控制器134执行或以其他方式促进本文所述的成像系统12的功能。例如,存储器136可包括处理指令、识别信息、装置注册配置、图像处理和增强信息等。存储器136和/或控制器134可使用一种或多种编程技术、数据操控技术和/或处理技术,例如使用算法、例程、查询表、阵列、搜索、数据库、比较、指令等促进本文中所描述的功能。
成像系统12还可包括通信电路138。通信电路138可对应于耦合到控制器134的收发器电路或发射器电路。收发器电路可允许成像系统12发射和/或接收无线通信信号。无线通信信号可传输到各种无线装置(例如原始发送器、家庭电子装置、移动通信装置和/或远程装置)或从各种无线装置接收。通信电路138可由控制器134控制。举例来说,控制器134可使通信电路138接通或断开,控制器134可使用通信电路138发送数据,格式化信息、启用信号、控制信号和/或其他信号或数据以通过通信电路138发送,或以其他方式控制通信电路138。来自通信电路138的输入也可由控制器134接收。例如,软件配置、更新、用户设置和其他信息可由通信电路138接收,并由控制器134存储在存储器136中。
控制器134还可耦合到网络适配器140、接收器和/或发射器。在一些实施方案中,网络适配器140可以被配置成与成像装置14通信。在一些实施方案中,网络适配器140可以是或可以包括蜂窝式收发器。在此配置中,成像系统12可使用网络适配器140和/或额外收发器(例如蜂窝式收发器)接入互联网、其他网络和/或网络硬件。在一些实施方案中,成像系统12可以通过与成像系统12通信的中间装置,如移动装置,访问互联网、其他网络和/或网络软件。
在示例性实施方案中,网络适配器140可以被配置成将数据和/或控制信号发送到移动装置/从移动装置接收数据和/或控制信号。网络适配器140可通过各种无线通信协议进行通信。举例来说,通信协议可包含但不限于
在一些实施方案中,成像系统12可包括环境光传感器142。环境光传感器142可以被配置成识别成像系统12的操作环境的操作条件或光级。环境光传感器142可与控制器134通信且被配置成传达指示车辆10附近的环境照明条件的光数据(例如,日光条件,夜间条件)。
控制器134可以经由车辆10的通信总线148与车辆控制模块146通信。通信总线148可以被配置成将信号递送到控制器134,从而识别车辆10的各种状态。举例来说,通信总线148可以被配置成传达车辆10的操作条件(例如,点火有效、档位选择、照明启用或设置等)、环境光水平、座位占用情况、门微开信号、驾驶员/乘员身份或可通过通信总线148传达的任何其他信息或控制信号。以此方式,控制器134可与车辆控制模块146通信以识别车辆10的各种状况和/或设置。
另外,控制器134可以与电机控制器150通信。可以为致动器46或电机配置电机控制器150,致动器或电机被配置成控制围绕调节轴A的模块38的位置和取向。如本文所述,被配置成定位或定向模块38的电机或致动器46可以对应于各种类型的装置,装置包括但不限于步进电机、伺服电机、旋转致动器等。
以下参考文献可包含用于提供后向面向的全景视图的成像器系统的各种实现方式,且以全文引用的方式并入本文中:美国专利第8,237,909B2号,标题为“VEHICLEREARVIEW MIRROR ASSEMBLY INCLUDING INTEGRATED BACKLIGHTING FOR A LIQUIDCRYSTAL DISPLAY(LCD)”,John B.Ostreko等人于2009年2月6日提交;以及美国专利第8,411,245号,标题为“MULTI-DISPLAY MIRROR SYSTEM AND METHOD FOR EXPANDED VIEWAROUND A VEHICLE”,Ethan J.Lee等人于2009年9月30日提交。尽管本文中所公开的各种实现方式中的成像系统12被示出为结合在后视显示系统中,但显示器可类似地结合在车辆前方的中心控制台中,作为平视显示器或可对车辆的操作员或乘员可见的任何其他位置中。
所属领域的技术人员应理解,所描述的发明和其他部件的构造不限于任何特定材料。除非在本文中另外描述,否则本文中所公开的发明的其他示例性实施方案可由各种各样的材料形成。
出于本公开的目的,术语“耦合(coupled)”(以其所有形式:couple、coupling、coupled等)通常意味着两个(电气的或机械的)部件彼此直接或间接的接合。此类接合在本质上可为静止的或在本质上为可移动的。此类接合可使用两个部件(电气的或机械的)和彼此或与两个部件一体地形成为单个整体的任何额外的中间构件实现。除非另外陈述,否则此类接合在本质上可为永久性的,或者在本质上可为可移除的或可释放的。
另外值得注意的是,如在示例性实施方案中展示的本发明的元件的构造和布置仅仅是说明性的。尽管在本公开中仅详细地描述了本创新的少数实施方案,但审阅本公开的所属领域的技术人员应容易了解,在不实质上脱离所陈述主题的新颖教示和优点的情况下,许多修改是可能的(例如,各种元件的大小、尺寸、结构、形状和比例、参数值、安装布置、材料的使用、色彩、定向等的改变)。举例来说,一体地形成的元件可由多个零件构造而成,或示出为多个零件的元件可一体地形成,可颠倒或以其他方式改变介面的操作,可改变结构的长度或宽度和/或系统的构件或连接器或其他元件,可改变元件之间的调整位置的性质或数目。应注意,系统的元件和/或组合件可由提供足够强度或耐久性的广泛多种材料中的任何一种构成,且可呈广泛多种色彩、纹理和组合中的任何一种。因此,所有此类修改意欲包含在本创新的范围内。可在不脱离本创新的精神的情况下在所要和其他示例性实施方案的设计、操作条件和布置方面进行其他取代、修改、改变和省略。
应理解,任何所描述的过程或在所描述过程内的步骤可与其他所公开过程或步骤组合以形成在本发明的范围内的结构。本文所公开的示例性结构和过程用于说明性目的,而不应理解为具有限制性。
还应理解,在不脱离本发明的概念的情况下,可对上述结构和方法做出变化和修改,且另外应理解,此类概念旨在由所附权利要求涵盖,除非这些权利要求的措辞明确说明并非如此。
- 具有一体化摄像头的多功能外后视镜
- 长臂外后视镜及具有该长臂外后视镜的客车