一种基于集值辨识算法的自适应无拖曳控制方法
文献发布时间:2023-06-19 09:36:59
技术领域
本发明涉及航空航天、控制科学与工程技术领域,特别涉及是指一种基于集值辨识算法的自适应无拖曳控制方法。
背景技术
地球重力场及其变化反映着地球表层及内部物质的空间分布和运动,同时决定着大地水准面的起伏和变化。因此,确定地球重力场的精细结构不仅是大地测量学、海洋学、地震学、空间科学、天文学、行星科学、深空探测、国防建设等的需求,同时也将为全人类寻求资源、保护环境和预测灾害提供重要的信息资源。
无拖曳控制技术是重力梯度卫星的关键技术之一。所谓的无拖曳控制技术,即采用惯性检测和微推力控制相结合,在航天器上施加持续的推力,以此“抵消”大气阻力或太阳光压等非保守力的作用,其目的是要为重力梯度仪提供一个近乎“纯引力”作用下的飞行环境,满足有效载荷正常工作对平台的技术需求。因此,对无拖曳控制技术的研究受到了国内外学者的广泛关注,取得了一批重要的成果。
重力梯度仪的测量精度很高,但量程相对较小,非保守力带来的加速度很容易超出重力梯度仪的测量量程,于是测量信息往往受到饱和约束的限制,这在很大程度上制约了无拖曳控制律的设计。饱和约束下的测量数据包含了约束区间内的精确信息和约束区间外的集值信息,这与经典控制理论所考虑的带噪声测量数据有本质不同,它所提供的信息相对有限,与实际的系统输入、状态以及被控输出等是非一一映射的本质非线性关系,以往针对线性系统、非线性系统等发展起来的经典方法不能直接使用。这就要求针对饱和约束测量数据的特点,发展相应的系统辨识和控制器设计方法。
现有方法主要利用重力梯度仪测量量程内的精确信息进行系统分析和控制器设计,没有对量程外的集值信息加以充分利用,无法实现饱和约束测量下的无拖曳控制。
发明内容
本发明实施例提供了基于集值辨识算法的自适应无拖曳控制方法,能够实现饱和约束测量下的无拖曳控制,并实现了阻力增益系数估计的一致性、闭环系统的稳定性、自适应控制器的渐近最优性。所述技术方案如下:
本发明实施例提供了一种基于集值辨识算法的自适应无拖曳控制方法,该方法包括:
对重力梯度仪测量量程内外的测量信息进行处理,得到重力梯度仪对残余加速度的集值型测量值,其中,所述测量信息为重力梯度卫星沿轨道飞行方向的残余加速度;
根据得到的重力梯度仪对残余加速度的集值型测量值,建立辨识算法对重力梯度卫星沿轨道飞行方向的阻力增益系数进行估计;
根据估计得到的阻力增益系数,构建重力梯度卫星沿轨道飞行方向的自适应控制器。
进一步地,重力梯度卫星沿轨道飞行方向上的运动为:
P-R=Ma
其中,P为推力,P∈[P
令y=a,得到
令
其中,y
进一步地,所述对重力梯度仪测量量程内外的测量信息进行处理,得到重力梯度仪对残余加速度的测量值,包括:
利用饱和函数
其中,s
给定正整数m≥2,从小到大取m-2个介于
利用重力梯度仪对残余加速度的测量值s
其中,
进一步地,所述根据得到的重力梯度仪对残余加速度的集值型测量值,建立辨识算法对重力梯度卫星沿轨道飞行方向的阻力增益系数进行估计包括:
基于每一个
其中,
进一步地,每个
进一步地,若输入变量u
其中,e
定义
记
进一步地,所述根据估计得到的阻力增益系数,构建重力梯度卫星沿轨道飞行方向的自适应控制器包括:
根据估计得到的阻力增益系数及必然等价原则,以极小化平均跟踪误差为指标,构建重力梯度卫星沿轨道飞行方向的自适应控制器。
进一步地,平均跟踪误差表示为:
其中,J
进一步地,所述根据估计得到的阻力增益系数及必然等价原则,以极小化平均跟踪误差为指标,构建重力梯度卫星沿轨道飞行方向的自适应控制器包括:
在θ已知的情况下,极小化平均跟踪误差指标的控制律应满足:
当
在θ未知时,根据必然等价原则,在
进一步地,在构建重力梯度卫星沿轨道飞行方向的自适应控制器时,若u
本发明实施例提供的技术方案带来的有益效果至少包括:
本发明实施例中,通过利用重力梯度仪测量量程内的精确信息和量程外的集值信息建立辨识算法对重力梯度卫星沿轨道飞行方向的阻力增益系数进行估计,进而根据估计得到的阻力增益系数,构建重力梯度卫星沿轨道飞行方向的自适应控制器,以实现饱和约束测量下的无拖曳控制,并实现了阻力增益系数估计的一致性、闭环系统的稳定性、自适应控制器的渐近最优性。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
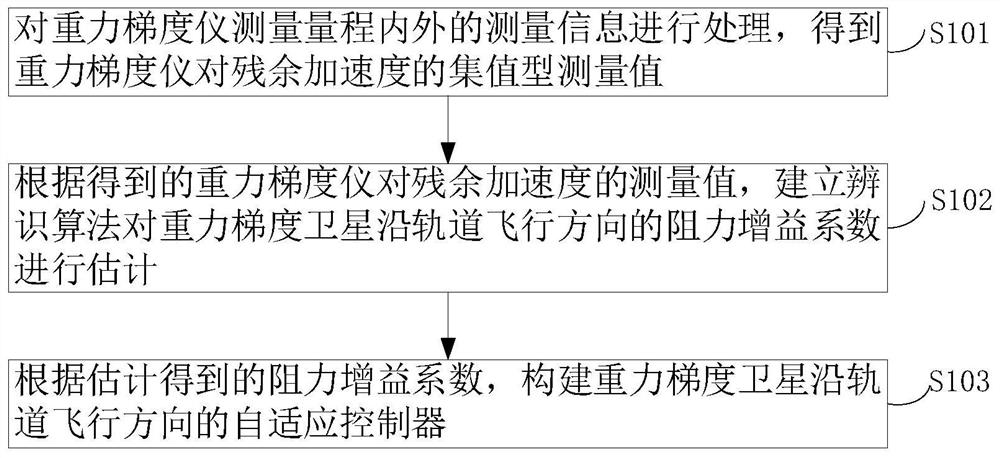
图1为本发明实施例提供的基于集值辨识算法的自适应无拖曳控制方法的流程示意图;
图2为本发明实施例提供的受饱和约束测量到的残余加速度示意图;
图3为本发明实施例提供的开环辨识算法的收敛性示意图;
图4为本发明实施例提供的开环辨识算法的收敛速度示意图;
图5为本发明实施例提供的交叉更新算法的收敛性示意图;
图6为本发明实施例提供的交叉更新算法与原算法的收敛速度对比示意图;
图7为本发明实施例提供的闭环辨识算法的收敛性示意图;
图8为本发明实施例提供的自适应控制器的渐近最优性示意图;
图9为本发明实施例提供的量化输入下辨识算法的收敛性示意图;
图10为本发明实施例提供的自适应控制器与量化的自适应控制器对比示意图;
图11为本发明实施例提供的自适应控制器的平均量化误差示意图;
图12为本发明实施例提供的量化自适应控制器下的跟踪指标示意图;
图13为本发明实施例提供的变量带误差下的辨识算法收敛性示意图;
图14为本发明实施例提供的变量带误差与不带误差下的自适应控制器对比示意图;
图15为本发明实施例提供的变量带误差下的跟踪指标示意图;
图16为本发明实施例提供的有色噪声下的辨识算法收敛性示意图;
图17为本发明实施例提供的有色噪声下的跟踪指标示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
如图1所示,本发明实施例提供了一种基于集值辨识算法的自适应无拖曳控制方法,该方法包括:
S101,对重力梯度仪测量量程内外的测量信息进行处理,得到重力梯度仪对残余加速度的集值型测量值,其中,所述测量信息为重力梯度卫星沿轨道飞行方向的残余加速度;重力梯度仪测量量程内外的测量信息包括:重力梯度仪测量量程内的精确信息和量程外的集值信息;
S102,根据得到的重力梯度仪对残余加速度的集值型测量值,建立辨识算法对重力梯度卫星沿轨道飞行方向的阻力增益系数进行估计;
S103,根据估计得到的阻力增益系数,构建重力梯度卫星沿轨道飞行方向的自适应控制器。
本发明实施例所述的基于集值辨识算法的自适应无拖曳控制方法,通过利用重力梯度仪测量量程内的精确信息和量程外的集值信息建立辨识算法对重力梯度卫星沿轨道飞行方向的阻力增益系数进行估计,进而根据估计得到的阻力增益系数,构建重力梯度卫星沿轨道飞行方向的自适应控制器,以实现饱和约束测量下的无拖曳控制,并实现了阻力增益系数估计的一致性、闭环系统的稳定性、自适应控制器的渐近最优性。
本实施例中,重力梯度卫星沿轨道飞行方向上的运动为:
其中,P为推力,P∈[P
令y=a,得到
令
其中,y
由于受重力梯度仪的量程限制,对y
其中,s
给定正整数m≥2,从小到大取m-2个介于
利用重力梯度仪对残余加速度的测量值s
其中,
在前述基于集值辨识算法的自适应无拖曳控制方法的具体实施方式中,进一步地,所述根据得到的重力梯度仪对残余加速度的集值型测量值,建立辨识算法对重力梯度卫星沿轨道飞行方向的阻力增益系数进行估计包括:
基于每一个
其中,
本实施例中,式(1.7)-(1.9)中的各个
进一步地,考虑输入变量u
当给系统施加输入时,由于各种原因可能会存在各种噪声/干扰,也就是说真正加到系统上的输入u
其中,e
定义
设
与输入变量u
在前述基于集值辨识算法的自适应无拖曳控制方法的具体实施方式中,进一步地,所述根据估计得到的阻力增益系数,构建重力梯度卫星沿轨道飞行方向的自适应控制器包括:
根据估计得到的阻力增益系数及必然等价原则,以极小化平均跟踪误差为指标,构建重力梯度卫星沿轨道飞行方向的自适应控制器。
本实施例的目标为:基于s
在前述基于集值辨识算法的自适应无拖曳控制方法的具体实施方式中,进一步地,平均跟踪误差表示为:
其中,J
在前述基于集值辨识算法的自适应无拖曳控制方法的具体实施方式中,进一步地,所述根据估计得到的阻力增益系数及必然等价原则,以极小化平均跟踪误差为指标,构建重力梯度卫星沿轨道飞行方向的自适应控制器包括:
在θ已知的情况下,极小化平均跟踪误差指标的控制律应满足:
如果上述方程是相容的(即式(1.10)的解满足式(1.11)所示的约束条件),那么u
在θ未知时,根据必然等价原则,在式(1.10)中用
本实施例中,进一步地,在构建重力梯度卫星沿轨道飞行方向的自适应控制器时,考虑输入变量u
接着,结合某重力梯度卫星具体的参数对本发明实施例所述的基于集值辨识算法的自适应无拖曳控制方法进行仿真:
参数包括:重力梯度卫星的质量M=1000kg,最大推力P
1)开环辨识算法仿真
分别对区间
在式(1.8)和(1.9)中用
2)闭环系统性能仿真
针对自适应控制器(即:式(1.12))下的闭环系统,图7展示了闭环辨识算法的收敛性。在图8中,
3)量化输入下的辨识与自适应控制
记输入为
其中,
4)变量带误差辨识与自适应控制
设
5)有色噪声下的辨识与自适应控制
设系统噪声为ω
ω
其中,p
此时,系统为
在m=5时,分别在三种噪声模型下对辨识算法和自适应控制器进行了仿真,图16展示了有色噪声下的辨识算法的收敛性;图17展示了有色噪声下的跟踪指标的达成。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于集值辨识算法的自适应无拖曳控制方法
- 一种基于集值辨识算法的自适应无拖曳控制方法