用于机动车的线控转向系统及其运行方法
文献发布时间:2023-06-19 10:40:10
本发明涉及一种用于机动车的线控转向系统和一种用于运行用于机动车的线控转向系统的方法。
线控转向系统的特征通常在于,与转向手柄连接的输入轴不再具有机械作用,例如至转换转向运动的齿条的机械作用。由此,从街道到转向装置到转向手柄的触觉反馈也丢失。因此已知的是,设置用于产生反作用力或换言之,反馈力矩的致动器(例如电动机),其此外根据调节的(车轮)转向角在转向手柄上产生反力矩。在此通常根据齿条位置确定转向角。
这样的线控转向系统例如由DE 101 03 404 A1或DE 100 32 183 A1已知。
由于安全原因,在技术系统中常见的是,设置冗余的用于提供类似的功能的部件。这例如也可以用于线控转向系统的调节装置,利用调节装置调节反作用力,和/或输出用于调节车轮转向角的调节量。但通过设置冗余的部件通常会提高成本,尤其甚至由于必须为冗余的部件提供分别功能相同的通信连接。
本发明所要解决的技术问题在于,改进线控转向系统,以及提供改进的用于运行线控转向系统的方法。
该技术问题利用根据权利要求1的用于机动车的线控转向系统和根据权利要求10的用于运行用于机动车的线控转向系统的方法解决。
本发明的基本构思是,提供多个用于反作用力和齿条位置的冗余的调节装置,其中,在无干扰的正常运行中使用一个调节装置,并且优选仅在出现干扰时使用其他的调节装置。因此,为反作用力和齿条位置提供冗余的或换言之,两通道的调节可能性。此外,调节装置不同地构造,其中,设置用于正常运行的装置例如可以比在干扰时使用的装置具有更强的性能。后者因此可以廉价地构造。
详细建议一种用于机动车的线控转向系统(随后也仅被称为转向系统),其具有:
-驾驶员能够操纵的转向手柄(例如方向盘);
-车轮致动器(例如包括伺服电机和/或功率电子装置),车轮致动器被设定用于调节车辆的至少一个能够转向的车轮的车轮转向角;
-与转向手柄连接的反作用力致动器(例如电动机),反作用力致动器设定用于产生与转向手柄的偏转相反地作用的反作用力;
-主调节装置,其被设定用于调节由反作用力致动器产生的反作用力,和
-后备调节装置,其被设定用于(尤其仅)在主调节装置的功能故障的情况下调节由反作用力致动器产生的反作用力;
其中,主调节装置还被设定用于,将调节参量输出到车轮致动器,以调节车轮转向角,并且后备调节装置还被设定用于,在主调节装置的功能故障时将调节参量输出到车轮致动器,以调节车轮转向角;并且其中,后备调节装置和主调节装置彼此不同地构造。
主调节装置可以是例如调节反作用力(或换言之,反馈力矩)的调节装置。相反地,后备调节装置可以主要用作控制,并且例如在没有实际值检测的情况下预设反作用力的值(即额定反作用力预设参量),其作为控制参量。
主调节装置和后备调节装置可以分别被转向系统的转向控制装置包括,并且尤其被共同的转向控制装置包括。优选地,主调节装置和后备调节装置包括不同的微处理器,其中,后备调节装置的微处理器可以构造为性能比较弱。
主调节装置和后备调节装置可以彼此独立地接收输入信号。为此,它们例如可以具有彼此独立的输入通信连接和/或用于输入信号的输入端。附加地或备选地,主调节装置和后备调节装置(随后也被称为调节装置)可以彼此独立地产生并且输出输出信号。为此,调节装置可以具有彼此独立的输出通信连接和/或用于输出信号的输出端。
主调节装置和后备调节装置可以设定用于,相互通信,或者至少相互交换特定的信号(即调节装置中的至少一个调节装置将信号传送到相应其他调节装置上,或者两个调节装置将信号传送到相应其他调节装置)。这例如可以设置用于转向手柄方位信号的随后描绘的可靠化或者说可信化和/或传送。
此外,主调节装置和后备调节装置可以连接至不同的车辆总线。车辆总线可以是例如根据CAN标准的主车辆总线。已知的是,车辆由于安全原因可以具有冗余的(主)车辆总线。调节装置与不同的车辆总线的连接附加地提高总系统的故障安全。
两个调节装置可以分别包括至少一个计算单元、例如微处理器,以便根据预设的程序指令处理输入信号,并且由此产生输出信号。输出信号通常可以是用于反作用力致动器的额定反作用力预设参量,和/或前述的用于车轮致动器的调节参量。
以自身已知的方式,车轮致动器可以作用于齿条,并且例如根据致动器位置和尤其电机转子位置使齿条移位。在对轴几何形状的认识中,齿条位置、致动器位置(即电机转子位置或角度)和/或与之相关联的车轮转向角可以以自身已知的方式相互换算。
尤其可以在转向系统的启动运行期间利用参考传感器来校准致动器位置。为此,参考传感器可以检测转向角(例如转向手柄的转向角),从中可以确定车轮转向角的与之相关联的(起始)值。用于确定车轮致动器位置的传感器(例如转子位置传感器)的首先相对的(起始)值和/或从中计算出的齿条位置预设参量可以据此例如通过将确定出的车轮转向角计算回转子位置的绝对值换算为绝对值。因此,尤其也在转向系统的进一步的运行期间,基于该校准,可以从首先相对(因为仅例如基于转子位置传感器)确定的齿条位置预设参量确定绝对的位置预设参量。换言之,以该方式可以确定启动值,用以确定绝对的转子位置。
通过两个调节装置的不同的构造可以节约成本。例如由于(例如关于调节质量、调节速度和/或调节精度)通常更低性能的设计和/或由于更少的输入端和/或输出端连接,后备调节装置尤其可以比主调节装置更廉价地构造。这基于以下构思,即后备调节装置主要或仅可以设置用于紧急运行,紧急运行仅在主调节装置的不常见出现的功能故障时才被激活。根据一种实施方式,后备调节装置具有比主调节装置更小的计算能力,其中,计算能力例如可以涉及计算速度和/或处理器时钟。
反作用力致动器优选通过直接的(即基本上或完全无分支的)通信连接与主调节装置连接。没有另外的计算单元或部件(除了反作用力致动器和主调节装置以外)例如能够通过通信连接来连接,或通过通信连接传送信号。因此,所提到的单元的快速的和直接的通信是可能的。附加地或备选地,反作用力致动器可以通过车辆总线与主调节装置连接。这有益于减少成本,因为不必设置单独和尤其直接的与主调节装置的通信连接。替代地,可以使用原本已安装的车辆总线,其中,该车辆总线可以是例如根据CAN标准的车辆主总线。
根据一种扩展方案,主调节装置设定用于,基于反作用力致动器的至少一个测得的电机电流(例如至少两个定子电流或者起动电流)产生额定反作用力预设参量。该测量值例如可以在实际力矩的意义中用于反作用力致动器的由主调节装置实施的力矩调节。这种力矩调节能够实现对产生的反作用力的精确调节。
附加地或备选地,后备调节装置可以设定用于,基于车轮致动器的测得的电机转子角度(或电机转子位置)、例如基于电机转子角度的改变产生额定反作用力预设参量。后备调节装置尤其不能够接收另外的输入信号来确定额定反作用力预设参量,和/或至少不能够接收和主调节装置相同的信号,和/或至少不能够接收关于反作用力致动器的电机电流的信号。与主调节装置不同地,后备调节装置可以在控制的意义中预设反作用力,而不用考虑实际反作用力值。
主调节装置可以接收手动转向力矩和/或转向手柄方位(例如形式为角度方位)的至少一个作为输入信号,并且优选地,据此确定额定反作用力预设参量。为此,转向系统可以包括适当的用于确定手动转向力矩的传感器(例如转矩传感器)和/或优选确定转向手柄的绝对位置(即角度方位)的位置或角度传感器。所提到的传感器优选是本质安全的(即具有两通道的或冗余的信号检测)。后备调节装置优选没有或至少没有直接,而是在任何情况下通过中间部件、如主调节装置与这样的传感器连接。
根据另一实施方式,主调节装置设定用于接收转向手柄方位作为输入信号,并且将转向手柄方位传送到后备调节装置。
此外,线控转向系统可以设定用于通过比较由主调节装置和后备调节装置分别确定的额定反作用力预设参量(和/或调节参量)来检验可信性。由此,例如如果主调节装置的额定反作用力预设参量与后备调节装置的额定反作用力预设参量偏差超过预设的尺度,那么可以确定主调节装置的功能故障。
此外,建议一种用于运行用于机动车的线控转向系统的方法,其中,线控转向系统包括:
-驾驶员能够操纵的转向转向手柄;
-车轮致动器,车轮致动器设定用于调节车辆的至少一个能够转向的车轮的车轮转向角;
-与转向手柄连接的反作用力致动器,反作用力致动器设定用于产生与转向手柄的偏转相反地作用的反作用力;
-主调节装置以及后备调节装置;
其中,借助主调节装置调节由反作用力致动器产生的反作用力,并且将调节参量从主调节装置输出到车轮致动器,用以调节车轮转向角,并且在主调节装置的功能故障的情况下,借助后备调节装置调节由反作用力致动器产生的反作用力,并且将用以调节车轮转向角的调节参量从后备调节装置输出到车轮致动器,其中,后备调节装置和主调节装置彼此不同地构造。
该方法可以包括任何另外的步骤、任何扩展方案和任何另外的特征,以便提供所有上述的或随后的相互作用、运行状态和功能。对设备特征的任何上述的或随后的阐述和扩展尤其也可以适用于措辞相同的方法特征,或设置在其中。尤其可以利用根据每个上述的或随后的方面的设备来实施该方法。此外,该方法可以包括例如基于在其中阐述的可信性检验或确定主调节装置与车轮致动器之间的通信连接的故障来确定主调节装置的功能故障的步骤。
随后根据附属的示意图阐述本发明。在此,在其方式和/或功能中一致的特征可以在所有附图中设有相同的附图标记。其中:
图1示出了根据本发明的实施例的线控转向系统,该线控转向系统实施根据本发明的方法;并且
图2示出了根据现有技术的线控转向系统。
在详细阐述本发明之前,首先根据图2详细阐述现有技术。
线控转向系统1包括形式为方向盘的转向手柄2,转向手柄与输入轴3连接。用于检测驾驶员的手动力矩M
在转向控制装置6中,根据手动力矩M
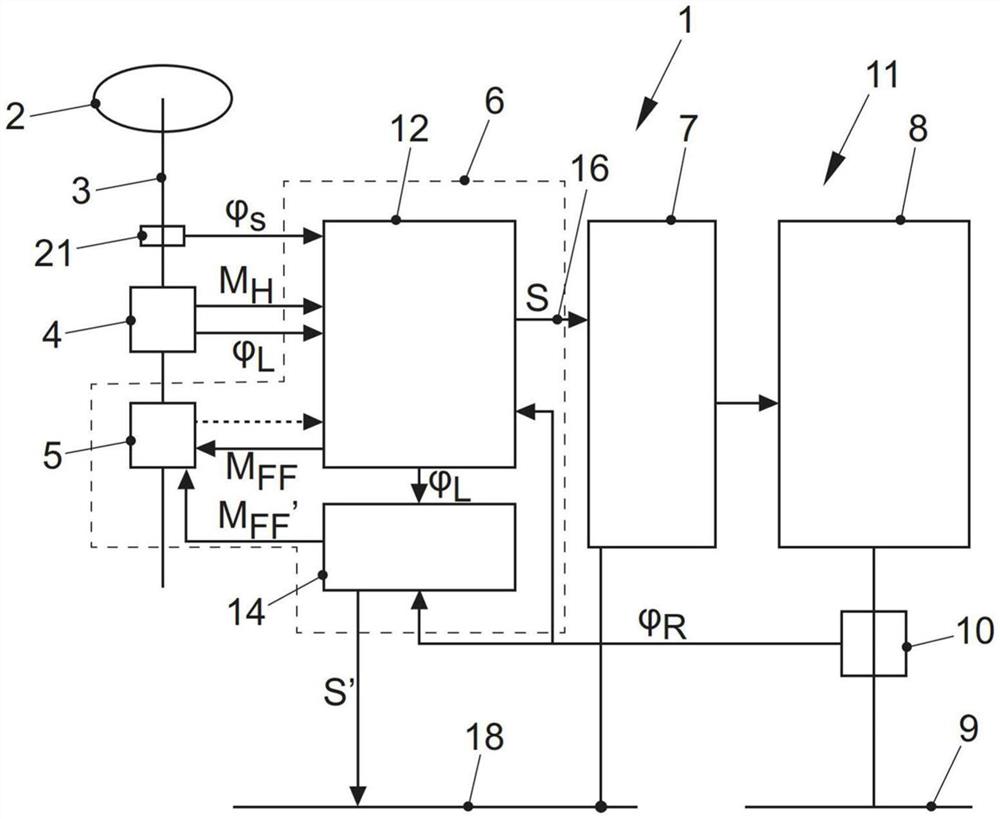
在图1中示出了根据本发明的线控转向系统1,其中,用和在图2中相同的附图标记表示相同的元件。除非另有说明或显而易见,否则这些元件还实施相同的步骤或提供相同的功能,如结合图2阐述的那样。
在图2中重新看到转向手柄2和输入轴3。它们与本质安全的转矩传感器4耦合,以便确定驾驶员的手动力矩M
此外看到转向控制装置6,其以随后描绘的方式将调节参量S、S’输出到车轮致动器11的功率电子装置7。车轮致动器又具有伺服电机8,以便可以以前述的方式作用于齿条9上,其中,重新通过转子位置传感器10产生转子角度信号
图1的根据本发明的示例与图2的示例尤其在转向控制装置6方面有所不同。该转向控制装置包括两个分离的调节装置12、14,它们分别具有自身的微处理器。与所示的变型方案不同地,主调节装置12和后备调节装置14也可以在结构上彼此分离,和/或构造为彼此独立的转向控制装置6。
更准确的说,转向控制装置6包括主调节装置12和后备调节装置14,主调节装置构造为用于产生反馈力矩M
主调节装置12至少接收手动力矩M
此外,主调节装置12输出调节参量S,其与之前的图2的示例类似地用于调节齿条位置。为此,主调节装置12通过直接的通信连接16与功率电子装置7连接(即通过通信连接16,其仅设计用于主调节装置12与功率电子装置7之间的通信,例如因为没有另外的部件对其进行访问)。
如描绘的那样,主调节装置12输出反馈力矩M
此外,主调节装置12优选由参考传感器21接收关于转向手柄起始方位
后备调节装置14没有与传感器4连接,并且尤其没有接收手动力矩M
此外,与主调节装置12一样,后备调节装置14也接收转子角度信号
此外,后备调节装置14也输出调节参量S’,其中调节参量又是齿条位置预设参量。这然而没有通过直接的组合连接16进行,而是通过还连接至功率电子装置7的车辆通信总线18进行。由此可以节约成本,因为与可能的直接的组合连接16不同地,车辆通信总线18原本就存在。
只有确定主调节装置12的功能故障时,后备调节装置14的输出信号M
在探测功能故障时,通常也可以将功率电子装置7的电压供应切换到后备供应,以便确保安全的继续运行。
为了检验相应正确的功能性,还可以在主调节装置12与后备调节装置14之间传输测试信号(例如计算规则)。
利用所示的解决方案,此外通常能够实现使用尽可能常规的车轮致动器11,和/或单通道地构造车轮致动器,因为在此仅选择性地在调节参量S、S’之间作为输入参量切换。
总体上,利用所示的系统和通过系统提供的冗余改进关于确定调节参量S、S’或齿条位置预设参量并且产生反馈力矩M
附图标记清单
1 线控转向系统
2 转向手柄
3 输入轴
4 力矩传感器
5 反作用力致动器
6 转向控制装置
7 功率电子装置
8 伺服电机
9 齿条
10 转子位置传感器
11 车轮致动器
12 主调节装置
14 后备调节装置
16 通信连接
M
M
M
- 用于线控转向式转向系统的运行方法、用于线控转向式转向系统的控制单元、线控转向式转向系统和车辆
- 控制线控转向的转向系统的方法和用于机动车辆的线控转向的转向系统