一种机载控制耦合交联部件检测方法及其检测装置
文献发布时间:2023-06-19 10:51:07
技术领域
本发明涉及机载控制耦合交联部件检测维修领域,具体是一种机载控制耦合交联部件检测方法及其检测装置。
背景技术
机载控制耦合交联部件是飞机惯性导航系统的计算核心,用于转换和计算惯性传感器感知的俯仰、倾斜和航向角,以模拟量的形式向座舱的指示仪表输出用于引导飞行,以代码的形式输出到机上其它系统作为导航的基准;根据导航系统的需求计算不同参考坐标系的航向;积分运算加速度计输出的加速度信号,以线速度的形式输出到导航计算机进行位置解算。控制耦合交联部件的完好性直接影响到飞行安全和战斗性能,因此在修理后必须对角度的解算精度、数字积分器的性能进行详细的检测,检测设备测试的全面性、稳定性、准确性至关重要。
而对于航空维修修理过程中的控制耦合交联部件的性能检测,目前采用的是系统联试的方法进行,空军工程大学学报(自然科学版)第9卷第5期(发表日2008年10月)发表一篇“某型飞机惯导系统检测设备研制”的论文,文中所设计的系统设计采用CompactPCI工控机,硬件设备包括CompactPCI主机箱、显示器、适配接口、打印机等,主要完成信号调理、数据采集、处理和发送等工作。缺点是测试性能需要整个惯性导航系统参与工作尤其是系统中价值昂贵的且有使用寿命的两套互为备份的惯性传感器参与工作,这存在以下问题:一是缩短了惯性传感器的寿命增加其故障率,使得试验成本大大增加;二是由于惯性传感器每次试验时均需要(10~15)min的准备时间,试验完成后还需要等待3min后才能再次启动产品,这增加了机载控制耦合交联部件的试验时间。
舰船电子工程2014年第6期(总第240期)Vol.34No.6发表一篇“惯性导航计算机通用检测仪的设计与应用”的论文,文中所设计的系统采用工业标准PC104总线接口组成的ATE结构模式,它是由测试计算机主机、同步通讯模块、模拟量采集模块、开关量控制模块、总线转接模块、供电转换模块等组成,主要是对某系列导弹惯性导航计算机进行性能检测,检测的主要参数包括二次电源电压、对准结果、导航数据、陀螺工作状态、导航结果等。这种方法的缺点一是该型检查仪主要是针对某系列导弹惯性导航计算机进行性能检查与本发明所涉及的控制耦合交联部件是不同类型的产品,其对外接口和工作原理均不同。二是该型检查仪没有设计航向角度仿真器和平台参数仿真器模拟惯导输出的角度和加速度信号,使得在测试时需要真实的产品作为信号源,提供角度时还需要借助转台进行激励,使得试验成本大幅增加。
发明内容
为了解决上述问题,本发明提出一种机载控制耦合交联部件检测方法及其检测装置。
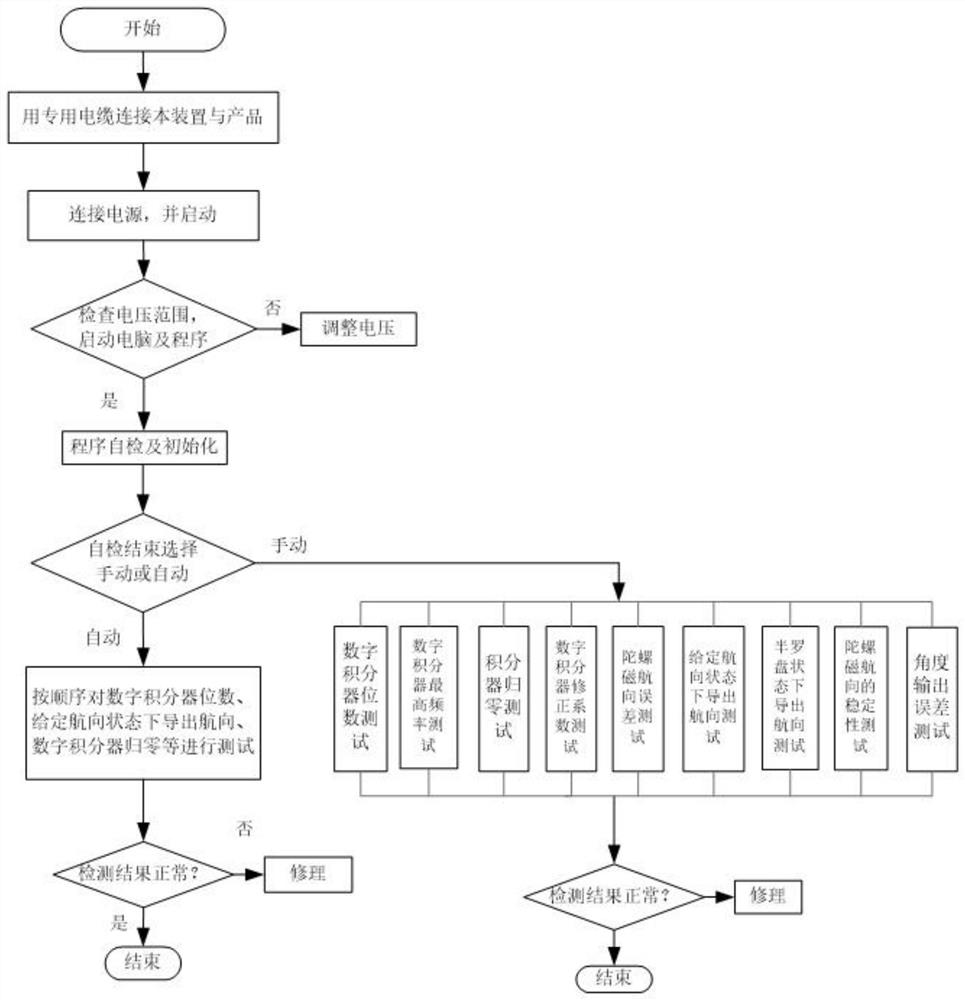
一种机载控制耦合交联部件的检测方法,其具体步骤如下:
S1、准备工作:将被测的控制耦合交联部件通过专用测试电缆与本装置进行连接,同时连接好供电电缆;启动系统电源,检查各交直流电源输出值在正常工作范围内;同时在上位机电脑上启动测试程序;
S2、根据测试需求选择:测试程序完成初始化自检后,根据测试需求选择自动测试或手动测试,在手动测试菜单中选择需要测试的具体项目;
S3、手动测试:用户选择手动测试时,软件会将测试项目加载到提示栏中,用户按照提示对选中的测试项目进行单步测试,程序会自动判断测试结果并显示,操作者任意对测试项目进行控制并中途停止;
S4、自动测试:用户选择自动测试时,系统会按照自动加载所有测试项目,具体操作如下:
a:操作者点击“开始”按钮,程序按预定测试流程逐项进行测试,测试的数据保存在数据库中;
b:程序在执行过程中会按照手动测试加载的项目列表逐一执行,同时判断结果是否符合要求,并将超差的数据在提示栏中显示;
c:测试完成后,点击菜单栏中的“报告”选项,将本次测试结果自动填入数据文档中;
d:如有特殊情况需要中途停止程序运行,直接按“停止”按钮,此时程序会停止部件工作;
S5、退出:完成测试后,按程序菜单上的“退出”按钮,正常退出测试程序,操作者点击“报告”选项查阅测试报告。
所述的步骤S2中的具体项目包括包含:数字积分器位数测试、数字积分器最高频率测试、积分器归零测试、数字积分器修正系数测试、陀螺磁航向误差测试、给定航向状态下导出航向测试、陀螺半罗盘状态下导出航向误差测试、陀螺磁航向的稳定性测试、角度输出误差测试。
一种机载控制耦合交联部件检测方法的检测装置,包括PLC机箱、与PLC机箱配合作为负责检测仪及被测部件所需的各类交直流电源的特种一体化电源、与特种一体化电源配合的风扇组件以及检测设备所有供电的核心控制单元的配电装置,还包括与PLC机箱配合用于模拟惯性传感器输出的加速度的量化信号的平台参数仿真器、用于模拟外部信息系统的数字总线通讯仿真器、用于仿真惯性传感器输出的正余弦角度信号的航向角度仿真器、负责被测系统中各离散量的输出检查及信号输出输入通道的切换的控制矩阵单元、作为检测设备所有供电的核心控制单元的电源控制器,查看检查结果是否正常,是则结束,否则进行修理。
所述的特种一体化电源包括产品旋变激磁电源36V,在23V~30V范围内调的标准值为27V的直流电源,在108V~119V范围内调的标准值为115V的交流电源。
所述的电源控制器负责各路交、直流电源的控制与输出,显示各路电源的输出电流,内部配置电源滤波器、保险座。
所述的平台参数仿真器的信号由被测部件进行数字积分解算后,通过419总线向外部设备输出数字化的速度信息,并向仿真器回传平台施矩信号。
所述的数字总线通讯仿真器以419总线通讯协议双极性码格式向被测部件发送航向参数,再将被测部件送出的数字化信息解算成角度信息。
所述的航向角度仿真器能够仿真不同的输入角度并根据被测部件内的固定的陀螺航向、给定航向、外部航向、磁航向解算程序解算出不同输入角度下的导出航向,通过航向仿真指示仪显示在测控界面中。
本发明的有益效果是:航向角度仿真器根据被测部件内的固定的陀螺航向、给定航向、外部航向、磁航向解算程序解算出导出航向,通过航向仿真指示仪显示在测控界面中,实现了自动化;特种集成一体化电源负责检测仪及被测部件所需的各类交直流电源,包括产品旋变激磁电源36V,在23V~30V范围内调的直流27V,在108V~119V范围内调的交流115V,整台检测仪外部仅需要交流220V市电就完成全套测试,无需其它电源配置。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1为本发明的检测装置的系统组成框图;
图2为本发明的测试流程图;
图3为本发明的检测装置的结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
如图1至图3所示,一种机载控制耦合交联部件的检测方法,其具体步骤如下:
S1、准备工作:将被测的控制耦合交联部件通过专用测试电缆与本装置进行连接,同时连接好供电电缆;启动系统电源,检查各交直流电源输出值在正常工作范围内;同时在上位机电脑上启动测试程序;
S2、根据测试需求选择:测试程序完成初始化自检后,根据测试需求选择自动测试或手动测试,在手动测试菜单中选择需要测试的具体项目;
S3、手动测试:用户选择手动测试时,软件会将测试项目加载到提示栏中,用户按照提示对选中的测试项目进行单步测试,程序会自动判断测试结果并显示;操作者任意对测试项目进行控制并中途停止;
S4、自动测试:用户选择自动测试时,系统会自动加载所有测试项目,具体操作如下:
a:操作者点击“开始”按钮,程序按预定测试流程逐项进行测试,测试的数据保存在数据库中;
b:程序在执行过程中会按照手动测试的加载的项目列表逐一执行,同时判断结果是否符合要求,并将超差的数据在提示栏中显示;
c:测试完成后,点击菜单栏中的“报告”选项,将本次测试结果自动填入数据文档中;
d:如有特殊情况需要中途停止程序运行,直接按“停止”按钮,此时程序会停止部件工作;
S5、退出:完成测试后,按程序菜单上的“退出”按钮,正常退出测试程序,操作者点击“报告”选项查阅测试报告,查看检查结果是否正常,是则结束,否则进行修理。
所述的步骤S2中的具体项目包括包含:数字积分器位数测试、数字积分器最高频率测试、积分器归零测试、数字积分器修正系数测试、陀螺磁航向误差测试、给定航向状态下导出航向测试、陀螺半罗盘状态下导出航向误差测试、陀螺磁航向的稳定性测试、角度输出误差测试。
一种机载控制耦合交联部件检测方法的检测装置,包括PLC机箱、与PLC机箱配合作为负责检测仪及被测部件所需的各类交直流电源的特种一体化电源、与特种一体化电源配合的风扇组件以及检测设备所有供电的核心控制单元的配电装置,还包括与PLC机箱配合用于模拟惯性传感器输出的加速度的量化信号的平台参数仿真器、用于模拟外部信息系统的数字总线通讯仿真器、用于仿真惯性传感器输出的正余弦角度信号的航向角度仿真器、负责被测系统中各离散量的输出检查及信号输出输入通道的切换的控制矩阵单元、作为检测设备所有供电的核心控制单元的电源控制器。
控制耦合交联部件通过专用测试电缆与检测适配器配合。
模拟惯性传感器输出的加速度的量化信号的平台参数仿真器、用于模拟外部信息系统的数字总线通讯仿真器、用于仿真惯性传感器输出的正余弦角度信号的航向角度仿真器、负责被测系统中各离散量的输出检查及信号输出输入通道的切换的控制矩阵单元。
如图3所示,附图标记1为PLC机箱的主机平台,附图标记2为电源控制器,附图标记3为控制矩阵单元及平台参数仿真器,附图标记4为显示器,附图标记5为检测适配器,附图标记6为PLC机箱的键盘、鼠标的托架,附图标记7为PLC机箱,附图标记8为数字总线通讯仿真器,附图标记9为特种一体化电源。
所述的特种一体化电源包括产品旋变激磁电源36V,在23V~30V范围内调的标准值为27V的直流电源,在108V~119V范围内调的标准值为115V的交流电源,整台检测仪外部仅需要交流220V市电就可完成全套测试,无需其它电源配置。
通过键盘、显示器对PLC机箱进行操控。
所述的电源控制器负责各路交、直流电源的控制与输出,显示各路电源的输出电流,内部配置电源滤波器、保险座。
所述的平台参数仿真器的信号由被测部件进行数字积分解算后,通过419总线向外部设备输出数字化的速度信息,并向仿真器回传平台施矩信号。
所述的数字总线通讯仿真器以419总线通讯协议双极性码格式向被测部件发送航向参数,再将被测部件送出的数字化信息解算成角度信息。
所述的航向角度仿真器能够仿真不同的输入角度并根据被测部件内的固定的陀螺航向、给定航向、外部航向、磁航向解算程序解算出不同输入角度下的导出航向,通过航向仿真指示仪显示在测控界面中,实现了自动化;特种集成一体化电源负责检测仪及被测部件所需的各类交直流电源,包括产品旋变激磁电源36V,在23V~30V范围内调的直流27V,在108V~119V范围内调的交流115V,整台检测仪外部仅需要交流220V市电就完成全套测试,无需其它电源配置。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种机载控制耦合交联部件检测方法及其检测装置
- 一种机载天线安装精度检测方法及检测装置