一种适用于机械移栽的旋转式自动扶苗装置
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及移栽机械技术领域,具体涉及一种适用于机械移栽的旋转式自动扶苗装置。
背景技术
随着移栽机技术的不断发展,为保证移栽后钵苗的成活率,对钵苗直立度的要求越来越精确,现在的移栽技术还达不到一次性使钵苗移栽后直立度达到标准范围,需要借助各种扶苗机构进行钵苗扶正工作。
例如:在半自动移栽机设计中,常用吊杯式或吊篮式移栽机构保证钵苗栽植直立性;导苗管式移栽机采用倾斜导苗筒式扶苗机构,通过控制导苗筒倾角使钵苗落地后自动立正,但是机构作业的可靠性受机具前进速度影响较大;另外,还有吉林大学周德义等人(农业机械学报,2003,34(5):57-60)利用凸轮装置使钵苗在支撑状态下覆土,保证秧苗直立,但装置精确度较低,在使用后还会出现直立度不达标的钵苗;东北林业大学孙丽萍等人(林业机械与木工设备,2009, 37(9):33-37)在 “基于ADAMS的移栽机用凸轮摆杆扶苗机构设计及运动仿真分析”中,利用凸轮传动结构扶苗,虽然通过运动仿真分析提高了机构的精确度,但整体结构效率较低,且运动时影响因素比较多。
以上的扶苗机构都具有不足之处,并且,目前的扶苗机构大都是进行栽植过程(钵苗入土前)的动作轨迹优化以及干涉轨迹进行调整直立度,容易受到移栽速度、钵苗落地时的状态影响,精确度难以保证,无法保证田间效果。
发明内容
针对现有技术的缺陷,本发明的目的在于提供一种适用于机械移栽的旋转式自动扶苗装置,设计了多自由度的空间扶苗机构,能够根据钵苗的倾斜状态调整机构的位置和倾斜角度,使用扶苗管将歪倒的钵苗扶正,同时结合扶土器保证钵苗周围土壤的稳定性,不受钵苗移栽动作轨迹影响,适用范围广,稳定性高。
为了达到上述目的,本发明所采用的技术方案是:
一种适用于机械移栽的旋转式自动扶苗装置,包括从上到下依次设置的横梁、弧形滑轨和扶苗机构;所述横梁设在最上方,包括横向导轨、横向滚轮、套筒和连轴,所述横向滚轮设置在所述横向导轨上,并通过套筒与连轴连接,横向滚轮在外部电机的带动下能够在横向导轨上移动并带动连轴移动,连轴能够在外部电机驱动下进行旋转;所述弧形滑轨通过连轴设置在横梁下方,从顶端向两侧逐渐向下弯曲形成弧形,且顶端中心处与所述连轴底部固定连接;所述扶苗机构设在弧形滑轨下方,包括定位转轮、扶苗器滑轨、扶苗器动轮、扶苗管和扶土器,所述定位转轮位于扶苗机构顶端且滚动设置在所述弧形滑轨上,由外部电机控制沿所述弧形滑轨运动,定位转轮与位于下方的扶苗器滑轨固定连接,所述扶苗器滑轨向下延伸,扶苗器动轮设置在所述扶苗器滑轨上,在外部电机驱动下能够沿所述扶苗器滑轨上下移动,扶苗器动轮还通过连杆与所述扶苗管固定连接,所述连杆一端连接在扶苗器动轮中间并向下延伸贯穿扶苗器滑轨底部,另一端与扶苗管上端固定连接,扶苗管外部固定有所述扶土器,所述扶土器为外径大于所述扶苗管的空腔结构;
所述的横向滚轮、定位转轮、扶苗器动轮分别与相应的外部电机连接并在电机驱动下在各自的轨道内进行移动,分别实现扶苗机构的横移、旋转、角度倾斜及上下移动,保证所述扶苗管、扶土器能够移动到相应位置进行作业,所述扶苗管对直立度不达标的钵苗进行扶苗,所述扶土器在扶苗时对钵苗根部进行扶土。
所述连轴在外部电机的驱动下能够沿自身轴线进行360度旋转。
所述套筒的两侧设有对称的转轴,横向滚轮转动设置在转轴上并支撑在横向导轨上,连轴的上端转动连接在套筒内部。
所述扶苗管为圆管状,在扶苗时扶苗管向下运动逐渐罩住钵苗,且扶苗管下端插入土壤中。
所述扶土器为矩形空腔结构,且扶土器的下端面低于所述扶苗管的下端面。
所述弧形滑轨顶部设有凸台,所述连轴底端插入凸台内部并通过螺栓横穿凸台实现固定连接。
有益效果: 1. 本装置是在移栽后对直立度不达标钵苗进行自动扶正,相比现有技术中在移栽过程中(钵苗入土前)纠正钵苗直立度的机构来说,本装置不受移栽时钵苗运动轨迹影响,可靠性高,且提高了移栽机的工作效率,减少了人工扶苗的劳动力损耗。
2. 本装置采用三轨道的空间结构设计,能够实现扶苗机构的旋转、横向移动、竖直移动以及倾斜角度调整,以保证所述扶苗管、扶土器可移动到任何位置钵苗进行扶正,适应各种角度需要扶正的钵苗,所述横梁的横向轨道保证本装置整体能够移动在钵苗所处范围,连轴的360°旋转与弧形轨道保证扶苗管、扶土器可以全方位调整角度,扶苗器滑轨使扶苗管、扶土器进行上下移动,从而准确的罩住钵苗并将其扶正。
3.本装置的扶苗管采用从钵苗顶部向下运动将钵苗套住后进行扶正的方法,能够防止扶苗时钵苗受到损伤,同时所述扶土器对钵苗根部进行覆土,防止根部裸露影响生长。
附图说明
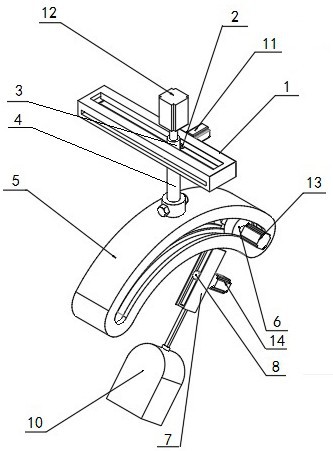
图1 为本发明的整体结构示意图;
图2 为本发明扶苗机构的示意图;
图3 为本发明扶苗机构的剖视示意图;
图4 为本发明套筒的结构示意图;
图5为本发明横向导轨的截面示意图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步详细的说明。
如图1-5所示,一种适用于机械移栽的旋转式自动扶苗装置,包括横梁、弧形滑轨5和扶苗机构,横梁位于本装置最上方,弧形滑轨5位于所述横梁下方,两者通过连轴4相连,扶苗机构位于所述弧形滑轨5下方,扶苗机构顶端的定位转轮6位于弧形滑轨5内部轨道上。
所述横梁包括横向导轨1、横向滚轮2、套筒3和连轴4,所述横向导轨1外部为长方体状,内部为空心轨道,如图5所示,所述横向滚轮2位于所述横向导轨1内部轨道上,并通过套筒3与连轴4连接,横向滚轮2在电机一11的带动下能够在横向导轨1上移动并带动连轴4横向移动,连轴4还能够在电机二12的驱动下进行旋转。
具体地,所述套筒3的两侧设有对称的转轴,横向滚轮2转动设置在转轴上并支撑在横向导轨1上,连轴4的上端转动连接在套筒3内部;连轴4在电机二12的驱动下能够沿自身轴线进行360度旋转。
所述弧形滑轨5通过连轴4设置在横梁下方,从顶端向两侧逐渐向下弯曲形成弧形,且顶端中心处与所述连轴4底部固定连接;所述弧形滑轨5可以跟随所述连轴4的运动进行平移与旋转。
具体地,所述弧形滑轨为半圆弧形,所述弧形滑轨顶部设有凸台,所述连轴底端插入凸台内部并通过螺栓横穿凸台实现固定连接。
所述扶苗机构设在弧形滑轨5下方,包括定位转轮6、扶苗器滑轨7、扶苗器动轮8、扶苗管9和扶土器10,所述定位转轮6位于扶苗机构顶端且滚动设置在所述弧形滑轨5上,由电机三13控制所述定位转轮6沿所述弧形滑轨5的内部轨道运动,定位转轮6与位于下方的扶苗器滑轨7固定连接,所述扶苗器滑轨7向下延伸,所述扶苗器滑轨7为长方体状,内部为可以令所述扶苗器动轮8进行上下运动的轨道,扶苗器动轮8设置在所述扶苗器滑轨7上,电机四14驱动下能够沿所述扶苗器滑轨上下移动,扶苗器动轮8还通过连杆与所述扶苗管9固定连接,所述连杆一端连接在扶苗器动轮8中间并向下延伸贯穿扶苗器滑轨7底部,另一端与扶苗管9上端固定连接,所述扶苗管9为圆管状,在扶苗时扶苗管9向下运动逐渐罩住钵苗,且扶苗管9下端插入土壤中,所述扶土器10固定在所述扶苗管9外部且为空腔结构,体积大于所述扶苗管9,用于在扶苗时对钵苗根部进行扶土。
具体地,扶土器10为矩形空腔结构,且扶土器10的下端面低于所述扶苗管9的下端面。
所述的横向滚轮2、连轴4、定位转轮6、扶苗器动轮8分别与相应的外部电机(包括电机一、电机二、电机三、电机四)连接并能够在电机驱动下在各自的轨道内进行移动,外部电机与外部检测系统连接,通过外部检测系统对钵苗倾斜状况的检测与反馈后,外部电机驱动相应部件做出相应动作,分别实现扶苗机构的横移、旋转、角度倾斜及上下移动,保证所述扶苗管9、扶土器10能够移动到相应位置进行作业,所述扶苗管9对直立度不达标的钵苗进行扶苗,所述扶土器10在扶苗时对钵苗根部进行扶土。
其中,横向滚轮2位于装置的轴心位置,通过横向导轨1可以左右移动,作用是适当的调整装置在钵苗上方的水平位置,使装置的轴心处在钵苗茎秆与地面连接点的正上方。弧形滑轨5 通过连轴4和上方的中心轴相连接,整体是圆弧形,连轴4能够360度旋转从而带动弧形滑轨5旋转,主要用于调整扶苗机构的位置和倾斜角度,便于扶苗管9对准钵苗并与钵苗倾斜角度一致;定位转轮6位于扶苗器滑轨7内部,沿着扶苗器滑轨7上下移动,用于使扶苗管9向下移动靠近钵苗并罩在钵苗外部插入土中,扶苗管9外部有扶土器10,在扶苗的同时,不破坏钵苗周围土壤,有利于钵苗扶正后的正常生长。
上述装置由多个电机控制,在移栽机移栽后,利用钵苗直立度和位置自动测定系统,可以检测出钵苗直立度、位置有关的多项数据,这些数据经过计算机处理,并转化为装置工作时所需要移动的位置信号,进一步利用电机使装置工作,具体工作过程如下:
根据计算机数据转化来的信号,横向滚轮2首先由电机一11控制进行横向移动,横向滚轮2移动使装置中心轴(连轴)位置刚好位于钵苗茎秆与地面连接点的正上方,且连轴4与地面呈90度夹角。此过程完成后,电机二12会收到一定角度的旋转信号,在电机二12的控制下,连轴4带动弧形滑轨5旋转至钵苗倒伏方向,即弧形滑轨5圆弧所在平面,与钵苗和其在地面投影所形成的平面,位于同一个平面上;然后,扶苗机构在接到信号后,电机三13驱动定位转轮6沿着弧形滑轨5移动给定的角度,这时候会使钵苗的茎秆与扶苗管9的轴心线大致在一条直线上;而在此直线上,电机四14驱动扶苗器动轮8移动,扶苗管9由扶苗器动轮8带动沿扶苗器滑轨7向下移动,扶苗管9会趋近于钵苗,并逐渐罩住钵苗。
扶苗管9外部为扶土器10,在扶苗过程中,插入钵苗周围土壤中,跟随扶苗器一起转动,避免扶苗过程中钵苗周围土层松动。扶土器10装置内部为扶苗管9,呈圆管状,在扶苗的过程中可将钵苗精确无损伤的罩住,罩住时会根据钵苗大致根的深度有一部分插入到土壤中,扶苗管9在转动时带动钵苗在土壤中转动,实现钵苗的扶正。
基于不同农作物在钵苗时期对于直立度的要求范围不同,可对最后扶苗管移动的角度进行调节,使其适用于多种农作物的钵苗扶正。在幼苗扶正动作完成后,扶苗管9沿扶苗器滑轨7缓慢退出土壤,并进行动作复原,完成此次扶苗操作。
本发明所描述的钵苗扶正装置,利用钵苗直立度的检测数据,具有多自由度的调整能力,能够在移栽后对直立度不达标钵苗进行自动扶正,弥补了移栽后钵苗倒伏所造成的损失,并且结构简单,自动化能力强,相对于半自动化的人工操作,具有更好的可靠性,提高了移栽机的工作效率,减少了人工扶苗的劳动力损耗。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种适用于机械移栽的旋转式自动扶苗装置
- 一种适用于机械移栽的旋转式自动扶苗装置