制动力控制装置
文献发布时间:2023-06-19 11:03:41
技术领域
本公开涉及制动力控制装置。
背景技术
以往,公知有调整对前轮施加的制动力、与对后轮施加的制动力之间的分配比(以下,称为“制动力分配比”。)的制动力控制装置(例如,参照日本特开2019-77221。)。日本特开2019-77221所公开的装置(以下,称为“现有装置”。)若变为车身的前部低于车身的后部那样的特定状态,则以后轮的制动力大于前轮的制动力的方式分配制动力。也将上述的特定状态称为“前端低头状态”。
现有装置在车身变为前端低头状态后以事后消除前端低头状态的方式调整制动力分配比。因此,前端低头状态的程度暂时变大,因此车辆的乘员的姿势变化。因此,乘员感到不舒适感。
发明内容
本公开提供一种能够以特定状态(前端低头状态)的程度不变大的方式预先调整制动力分配比的制动力控制装置。
一个实施方式中的制动力控制装置具备:
制动装置,搭载于车辆,构成为能够向包括前轮和后轮在内的多个车轮分别独立地施加制动力,并构成为能够变更对上述前轮施加的上述制动力、与对上述后轮施加的上述制动力之间的分配比;和
控制装置,搭载于上述车辆,并构成为执行以上述车辆的实际的加速度接近目标加速度的方式控制上述制动力的驾驶辅助控制(ACC、自动制动控制)。
上述控制装置构成为:在通过上述驾驶辅助控制使上述车辆减速的情况下,
将预先决定好的作为负的加速度的减速度设定为上述目标加速度,
假定使上述车辆产生上述目标加速度,以作为上述车辆的前部低于上述车辆的后部的状态的特定状态的程度不大于规定的程度的方式设定上述分配比,
以根据上述设定好的分配比将上述制动力向上述前轮和上述后轮分别施加的方式控制上述制动装置。
在通过驾驶辅助控制使车辆减速的情况下,制动力控制装置以特定状态的程度不大于规定的程度的方式预先设定分配比。因此,制动力控制装置能够抑制特定状态的程度大于规定的程度。其结果是,能够减少驾驶员感到不舒适感的可能性。
也可以构成为,在制动力控制装置的一个形态的基础上,上述控制装置构成为:根据表示上述减速度与从开始减速的时刻起的时间的关系的减速度信息,取得在当前时刻应使上述车辆产生的减速度,并且将该取得的减速度设定为上述目标加速度。
在上述减速度信息中,将上述减速度设定为处于定的第1范围内,并且将上述减速度的每单位时间的变化量设定为处于规定的第2范围内。
并且,上述控制装置构成为:作为表示上述特定状态的上述程度的指标值,使用表示上述车辆的车身绕左右方向的轴的倾斜的俯仰角的每单位时间的变化量亦即俯仰率。
例如,若俯仰率是负值并且其大小较大(即,若特定状态的程度变大),则车辆在俯仰方向上每单位时间大幅度地变化。在该情况下,乘员使身体向与该车辆的动作相反的方向挪动来取得平衡。乘员由于这样的身体的动作导致感到疲劳。与此相对地,本形态的控制装置使用俯仰率作为表示特定状态的程度的指标值。因此,能够有效地抑制每单位时间的车辆的俯仰方向的变化。根据本形态,乘坐舒适性提高,从而能够减少乘员感到疲劳的可能性。
制动力控制装置的一个形态还具备构成为能够检测上述多个车轮的各自的车轮速度的车轮速度传感器。
上述控制装置构成为:在上述驾驶辅助控制的执行中,
基于上述多个车轮的上述车轮速度,针对各车轮运算与上述车轮速度和基准速度的偏差相关的滑移指标值,
在上述多个车轮中的至少一个车轮的上述滑移指标值超过了规定的阈值的时刻以后,将上述分配比设定为预先决定好的标准分配比。
上述标准分配比是对上述前轮施加的上述制动力大于对上述后轮施加的上述制动力的分配比。
若在滑移指标值超过了规定的阈值的状况下调整分配比,则车辆的举动有可能变得不稳定。本形态的控制装置在滑移指标值超过了规定的阈值的时刻以后将分配比设定为标准分配比,因此能够抑制车辆的举动变得不稳定。
本公开的各结构要素并不限定于后述的实施方式。
以下参考附图,对本发明的示例性实施例的特征、优点、以及技术和工业意义进行描述,在附图中,相同的附图标记表示相同的元件。
附图说明
图1是具备实施方式所涉及的制动力控制装置的车辆的简要结构图。
图2是对在从横向观察车辆的二轮模型中作用于车辆的力进行说明的图。
图3是表示实施方式所涉及的加速度信息的图。
图4是表示实施方式所涉及的减速度信息的图。
图5是表示驾驶辅助ECU的CPU执行的“减速开始/结束判定例程”的流程图。
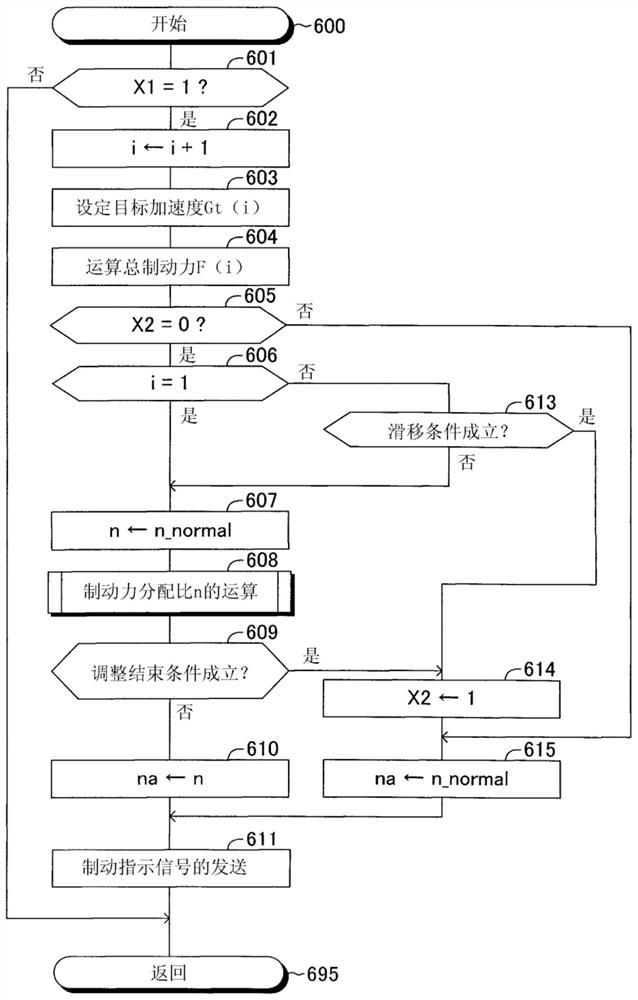
图6是表示驾驶辅助ECU的CPU执行的“减速控制例程”的流程图。
图7是表示在图6的例程的步骤608中驾驶辅助ECU的CPU执行的“分配比运算例程”的流程图。
图8是表示车辆通过驾驶辅助控制(ACC)减速的情况下的工作例的图,并且是表示图4的减速度信息(上侧的图)、和后轮制动力(Fr)相对于总制动力F之比相对于时间的变化的图(下侧的图)。
图9是表示图8的工作例中的俯仰率相对于时间的变化的图。
具体实施方式
(结构)
实施方式所涉及的制动力控制装置搭载于图1所示的车辆SV。车辆SV具备作为驱动轮的左前轮Wfl和右前轮Wfr、和作为非驱动轮的左后轮Wrl和右后轮Wrr。以下,尾标“fl”与“左前轮Wfl”对应,尾标“fr”与“右前轮Wfr”对应,尾标“rl”与“左后轮Wrl”对应,尾标“rr”与“右后轮Wrr”对应。并且,尾标“*”表示“fl、fr、rl以及rr”中的任意一个。
左前轮Wfl、右前轮Wfr、左后轮Wrl以及右后轮Wrr分别通过未图示的公知的悬架独立地从车身VB悬挂。悬架具备将车身VB与车轮W*连结的连结机构、用于吸收车身VB的上下方向的载荷的悬架弹簧、以及使弹簧的振动衰减的减振器等。
制动力控制装置具备发动机ECU10、制动ECU20以及驾驶辅助ECU30。这些ECU经由CAN(Controller Area Network)相互连接为能够交换数据(能够通信)。各ECU包括微型计算机。微型计算机包括CPU、ROM、RAM、非易失性存储器以及接口(I/F)等。CPU通过执行在ROM储存的指令(程序、例程)来实现各种功能。
发动机ECU10与包括加速踏板操作量传感器41在内的发动机状态量传感器(省略图示)连接。加速踏板操作量传感器41检测车辆SV的加速踏板51的操作量(加速器开度),并产生表示加速踏板操作量AP的信号。
并且,发动机ECU10与发动机致动器11连接。发动机致动器11包括变更发动机(内燃机)12的节气门的开度的节气门致动器。发动机ECU10基于加速踏板操作量AP和由其他发动机状态量传感器检测的驾驶状态量(例如,发动机旋转速度)来驱动发动机致动器11。由此,发动机ECU10能够变更发动机12产生的扭矩。将发动机12产生的扭矩经由变速器(省略图示)向驱动轮(左前轮Wfl和右前轮Wfr)传递。因此,发动机ECU10能够通过控制发动机致动器11来控制车辆SV的驱动力。
此外,在车辆SV是混合动力车辆的情况下,发动机ECU10能够控制由作为车辆驱动源的“内燃机和电动机”的任意一方或者两方产生的驱动力。并且,在车辆SV的电动汽车的情况下,发动机ECU10能够控制由作为车辆驱动源的电动机产生的驱动力。
制动ECU20与车轮速度传感器42fl、42fr、42rl以及42rr连接。对应的车轮W*每旋转一定角度,车轮速度传感器42*产生一个脉冲。
制动ECU20对每隔规定的测量时间车轮速度传感器42*产生的脉冲数进行计数,并根据该计数值运算设置有该车轮速度传感器42*的车轮W*的旋转速度(车轮的角速度)。而且,制动ECU20基于下述的(1)式来运算车轮速度(车轮的圆周速度)Vw*。制动ECU20将车轮速度Vw*向驾驶辅助ECU30输出。此外,在(1)式中,r*是车轮(轮胎)的动半径,ω*是车轮的旋转速度(角速度),N是转子的齿数(转子每旋转1圈产生的脉冲数),P*是每隔规定的测量时间ΔT计数的脉冲数。
Vw*=r*·ω*=r*·{(2·π/N)·(P*/ΔT)}…(1)
并且,制动ECU20基于车轮速度Vw*来运算各车轮W*的滑移比(滑移指标值)S*。滑移比S*是与车轮速度和基准速度的偏差相关的值,是表示车辆SV的举动的不稳定性的指标值之一。制动ECU20根据以下的(2)式来运算滑移比S*。此外,“Va”是基准速度,例如是所推断的车身速度。Va根据4个车轮速度Vw*的平均值、或者非驱动轮(左后轮Wrl和右后轮Wrr)的车轮速度的平均值等来运算。
S*=((Va-Vw*)/Va)×100%…(2)
并且,制动ECU20与制动致动器21连接。制动致动器21是对向设置于车轮W*的制动分泵22fl、22fr、22rl以及22rr供给的油压进行调整的致动器。制动致动器21例如包括通过对制动踏板52的踩踏力将工作油加压的主缸、向制动分泵22*供给油压的油压回路、以及为了向制动分泵22*独立地供给油压而设置于油压回路的控制阀等。
制动致动器21根据来自制动ECU20的指示,将与向制动分泵22*供给的工作油的压力(制动分泵22*的制动压力)成比例的制动力施加给对应的车轮W*。因此,制动ECU20通过控制制动致动器21,从而能够对车轮W*分别独立地施加制动力。
具体而言,制动ECU20基于主缸的压力来运算总制动力F。制动ECU20基于总制动力F和制动力分配比na来运算左前轮Wfl、右前轮Wfr、左后轮Wrl以及右后轮Wrr的各自的目标制动力Fbfl、Fbfr、Fbrl以及Fbrr。制动ECU20以各车轮W*的制动力成为对应的目标制动力Fb*的方式控制制动致动器21。
这里,如图2所示,总制动力F是前轮侧的制动力Ff与后轮侧的制动力Fr之和。以下,将前轮侧的制动力Ff称为“前轮制动力Ff”,将后轮侧的制动力Fr称为“后轮制动力Fr”。制动力分配比na是“前轮制动力Ff相对于总制动力F之比”。因此,以下的(3)~(5)式成立。
F=Ff+Fr…(3)
Ff=na×F…(4)
Fr=(1-na)×F…(5)
制动力分配比na通常设定为标准分配比n_normal。n_normal是比0.5大的值,例如是0.7。在该情况下,前轮制动力Ff大于后轮制动力Fr(即,总制动力F的向前轮侧的分配大于总制动力F的向后轮侧的分配)。
此外,左前轮Wfl的目标制动力Fbfl和右前轮Wfr的目标制动力Fbfr分别为“Ff/2”。左后轮Wrl的目标制动力Fbrl和右后轮Wrr的目标制动力Fbrr分别为“Fr/2”。
并且,如后述那样,制动ECU20通过与对制动踏板52的踩踏力无关地控制制动致动器21,从而能够分别控制制动分泵22*的制动压力。制动ECU20若从驾驶辅助ECU30接收制动指示信号,则基于制动指示信号所包含的总制动力F和制动力分配比na来运算各车轮W*的目标制动力Fb*。在该情况下,将制动力分配比na设定为标准分配比n_normal以下的值。制动ECU20以各车轮W*的制动力成为对应的目标制动力Fb*的方式控制制动致动器21。因此,制动ECU20能够变更制动力分配比na,并且控制车辆SV的制动力。以下,存在将如上述那样变更制动力分配比na的控制称为“分配比调整控制”的情况。
驾驶辅助ECU30与车速传感器43及周围传感器44连接。驾驶辅助ECU30接收这些传感器的检测信号或者输出信号。
车速传感器43检测车辆SV的行驶速度(车速),并输出表示车速SPD的信号。
周围传感器44取得与车辆SV的周围的道路(例如,车辆SV行驶的行驶车道)相关的信息、和与存在于该道路的立体物有关的信息。立体物例如表示四轮车辆(其他车辆)、两轮车辆以及步行人员等移动物、和导轨及护栏等固定物。以下,存在将这些立体物称为“物标”的情况。周围传感器44例如具备雷达传感器和照相机传感器。
周围传感器44对物标的有无进行判定,并且运算表示车辆SV与物标的相对关系的信息。表示车辆SV与物标的相对关系的信息包括车辆SV与物标的距离、物标相对于车辆SV的方位(或者位置)、以及物标相对于车辆SV的相对速度等。将从周围传感器44获得的信息(包括表示车辆SV与物标的相对关系的信息。)称为“物标信息”。周围传感器44将物标信息向驾驶辅助ECU30输出。
车辆SV的未图示的方向盘在与驾驶员对置的一侧并且能够由驾驶员操作的位置具备与跟随车距控制相关的操作装置60。存在将跟随车距控制称为“自适应巡航控制(Adaptive Cruise Control)”的情况。以下,将跟随车距控制简称为“ACC”。
驾驶辅助ECU30与操作装置60中的以下的开关(操作部)连接,并接收那些开关的输出信号。操作装置60包括主开关61、增速开关62、减速开关63以及车间时间开关64。对于这些开关61~64的详细的操作方法进行后述。
(ACC的概要)
驾驶辅助ECU30能够执行ACC作为驾驶辅助控制。ACC本身是公知的(例如,参照日本特开2014-148293、日本特开2006-315491、以及日本专利第4172434号说明书等。)。
ACC包括定速行驶控制和前车跟随控制这两种控制。定速行驶控制是无需加速踏板51和制动踏板52的操作就以使车辆SV的行驶速度与目标速度(设定速度)Vset一致的方式调整车辆SV的加速度的控制。前车跟随控制是将在车辆SV的紧前行驶的前车与车辆SV的车距维持在目标车距Dset并且使车辆SV跟随于前车的控制。
若驾驶辅助ECU30开始ACC(若如后述那样主开关61变为接通状态),则驾驶辅助ECU30基于由周围传感器44取得的物标信息判定是否存在在车辆SV的前方(紧前)行驶并且车辆SV应跟随的车辆(即,跟随对象车辆)。例如,驾驶辅助ECU30判定检测到的物标(n)是否存在于预先决定好的跟随对象车辆区域内。
在物标(n)不存在于跟随对象车辆区域内的情况下,驾驶辅助ECU30判定为不存在跟随对象车辆。在该情况下,驾驶辅助ECU30执行定速行驶控制。此外,也可以在ACC的开始时将目标速度Vset设定为在该时刻的车速SPD。驾驶辅助ECU30以车辆SV的车速SPD与目标速度Vset一致的方式使用发动机ECU10来控制发动机致动器11,从而控制驱动力,并且根据需要使用制动ECU20来控制制动致动器21,从而控制制动力。
与此相对地,在物标(n)在跟随对象车辆区域内存在规定时间以上的情况下,驾驶辅助ECU30选择该物标(n)作为跟随对象车辆(a)。而且,驾驶辅助ECU30执行前车跟随控制。驾驶辅助ECU30通过在目标车间时间Ttgt上乘以车速SPD来运算目标车距Dset。目标车间时间Ttgt如后述那样使用车间时间开关64来设定。驾驶辅助ECU30以车辆SV与跟随对象车辆(a)之间的车距Da与目标车距Dset一致的方式使用发动机ECU10来控制发动机致动器11,从而控制驱动力,并且根据需要使用制动ECU20来控制制动致动器21,从而控制制动力。
(操作装置的开关的结构)
接下来,对操作装置60的开关61~64的操作方法进行说明。主开关61是在使ACC开始/停止时由驾驶员操作的开关。每当按下主开关61时,主开关61的状态在接通状态与断开状态之间交替更换。若将主开关61从断开状态切换为接通状态,则驾驶辅助ECU30将ACC的工作状态从断开状态切换为接通状态(即,开始ACC)。另一方面,若将主开关61从接通状态切换为断开状态,则驾驶辅助ECU30将ACC的工作状态从接通状态切换为断开状态(即,停止ACC。)。
增速开关62是在使目标速度Vset增加时由驾驶员操作的开关。增速开关62在被驾驶员按压操作时变为接通状态,在未被驾驶员按压操作时变为断开状态。若增速开关62变为接通状态,则驾驶辅助ECU30使目标速度Vset增加规定的值。
减速开关63是在使目标速度Vset减少时由驾驶员操作的开关。减速开关63在被驾驶员按压操作时变为接通状态,在未被驾驶员按压操作时变为断开状态。若减速开关63变为接通状态,则驾驶辅助ECU30使目标速度Vset减少规定的值。
车间时间开关64是在设定目标车间时间Ttgt时由驾驶员操作的开关。每当在ACC的工作状态是接通状态的状况下按下车间时间开关64时,目标车间时间Ttgt得以变更。驾驶员能够选择3个阶段(长、中、短)的时间中的一个作为目标车间时间Ttgt。
(ACC中的加速控制)
当在ACC的执行中加速开始条件成立的情况下,驾驶辅助ECU30执行加速控制。加速开始条件在以下的条件A1与条件A2的任意一个成立时成立。
(条件A1):执行定速行驶控制,并且以下的算式成立:Vset-SPD>Vth1。这里,Vth1是速度偏差阈值,并且是正值。
(条件A2):执行前车跟随控制,并且以下的算式成立:Da-Dset>Dth1。这里,Da是在当前时刻的车距。Dth1是距离偏差阈值,并且是正值。
条件A1能够在通过对增速开关62的操作而将目标速度Vset变更为比当前时刻的车速SPD大的值时成立。条件A2能够在跟随对象车辆(a)加速后、或者通过对车间时间开关64的操作而目标车间时间Ttgt变更为比当前时刻的实际车间时间小的值时成立。
在加速开始条件成立的情况下,驾驶辅助ECU30使用预先决定好的加速度信息(图3)来决定目标加速度Gt。如图3所示,加速度信息表示加速度(正的加速度)Ga、与从开始加速的时刻起的时间t的关系。加速度信息储存于驾驶辅助ECU30的ROM。在加速度信息中,从开始加速的时刻(t=0)加速度Ga逐渐变大。并且,在时间t变为了Tp1的时刻以后,加速度Ga是恒定的值Gth1(例如,是0.2m/s
驾驶辅助ECU30根据加速度信息取得在当前时刻应使车辆SV产生的加速度Ga,并将该取得的加速度Ga设定为目标加速度Gt。而且,驾驶辅助ECU30以车辆SV的加速度接近目标加速度Gt的方式(或者以一致的方式)使用发动机ECU10来控制发动机致动器11,从而控制驱动力。
(ACC中的减速控制)
当在ACC的执行中减速开始条件成立的情况下,驾驶辅助ECU30执行减速控制。减速开始条件在以下的条件B1与条件B2的任意一个成立时成立。
(条件B1):执行定速行驶控制,并且以下的两个算式成立:Vset-SPD<0和|Vset-SPD|>Vth2。这里,Vth2是速度偏差阈值,并且是正值。
(条件B2):执行前车跟随控制,并且以下的两个算式成立:Da-Dset<0和|Da-Dset|>Dth2。这里,Dth2是距离偏差阈值,并且是正值。
条件B1能够在通过对减速开关63的操作而将目标速度Vset变更为比当前时刻的车速SPD小的值时成立。条件B2能够在跟随对象车辆(a)减速时、或者通过对车间时间开关64的操作而将目标车间时间Ttgt变更为比当前时刻的实际车间时间大的值时成立。
在减速开始条件成立的情况下,驾驶辅助ECU30使用预先决定好的减速度信息(图4)来决定目标加速度Gt。如图4所示,减速度信息是表示减速度(负的加速度)Gb、与从开始减速的时刻起的时间t的关系。减速度信息储存于驾驶辅助ECU30的ROM。在减速度信息中,减速度Gb设定于规定的第1范围内(下限值Gth2以上的范围)。具体而言,从开始减速的时刻(t=0)起减速度Gb逐渐变小。在时间t变为了Tp2的时刻以后,减速度Gb是下限值Gth2。例如,下限值Gth2是-0.2m/s
驾驶辅助ECU30根据减速度信息取得在当前时刻应使车辆SV产生的减速度Gb,并将该取得的减速度Gb设定为目标加速度Gt。而且,驾驶辅助ECU30以车辆SV的加速度接近目标加速度Gt的方式(或者以一致的方式)使用制动ECU20来控制制动致动器21,从而控制制动力。
(加速控制或者减速控制的结束)
当在ACC的执行中开始加速控制或者减速控制后以下的条件C1与条件C2的任意一个成立的情况下,驾驶辅助ECU30使加速控制或者减速控制结束。
(条件C1):执行定速行驶控制,并且目标速度Vset与当前时刻的车速SPD的偏差的大小(|Vset-SPD|)变为了零(或者变为了不足与零相近的结束阈值的值)。
(条件C2):执行前车跟随控制,并且在当前时刻的车距Da与目标车距Dset的偏差的大小(|Da-Dset|)变为了零(或者变为了不足与零相近的结束阈值的值)。
(工作的概要)
当在ACC的执行中执行减速控制的情况下,驾驶辅助ECU30使用图2所示的公知的二轮模型来决定制动力分配比na。
在图2中,G是车辆SV的重心,H是车辆SV的重心高度。ORf是由前轮的悬架的行程引起的前轮相对于车身VB的移动的瞬时中心,Orr是由后轮的悬架的行程引起的后轮相对于车身VB的移动的瞬时中心。Kf是前轮的悬架中的弹簧率[N/m],Kr是后轮的悬架中的弹簧率[N/m]。Cf是前轮的悬架中的吸收器衰减系数[N·s/m],Cr是后轮的悬架中的吸收器衰减系数[N·s/m]。
lf是车辆SV的前后方向上的重心G与前轮的中心位置(例如,车轴的位置)之间的距离[m]。lr是车辆SV的前后方向上的重心G与后轮的中心位置(例如,车轴的位置)之间的距离[m]。并且,θf是将瞬时中心ORf与前轮的接地点Ef连结的线段、与路面(与水平面平行的路面)成的角度,θr是将瞬时中心Orr与后轮的接地点Er连结的线段、与路面(与水平面平行的路面)成的角度。
θ是表示车身VB绕左右方向的轴的倾斜的角度(俯仰角)。前轮和后轮与路面(与水平面平行的路面)接触并且车身VB静止时的俯仰角θ为零。在车身VB的前部高于车身VB的后部时,俯仰角θ为正值。在车身VB的前部低于车身VB的后部时,俯仰角θ为负值。即,在车辆SV为特定状态(前端低头状态)时,俯仰角θ为负值。
具体而言,当在ACC的执行中执行减速控制的情况下,驾驶辅助ECU30首先从减速度信息中取得在当前时刻应使车辆SV产生的减速度Gb,该并将取得的减速度Gb设定为目标加速度Gt。
接下来,驾驶辅助ECU30假定使车辆SV产生目标加速度Gt,使用以下的(6)式和(7)式来运算俯仰率θ′。俯仰率θ′是俯仰角θ的每单位时间的变化量。在本例子中,将俯仰率θ′作为表示特定状态(前端低头状态)的程度的指标值使用。
【公式1】
(6)式是与车辆SV的俯仰方向相关的运动方程式。(7)式是与车辆SV的上下方向相关的运动方程式。这里,I是俯仰惯性力矩[kg·m
驾驶辅助ECU30使用(6)式和(7)式,使制动力分配比n变化并且运算俯仰率θ′。而且,驾驶辅助ECU30以特定状态的程度不大于规定的程度的方式决定制动力分配比n。具体而言,驾驶辅助ECU30以俯仰率θ′大于规定的俯仰率阈值θth的方式决定制动力分配比na。俯仰率阈值θth是预先决定好的负的值。在本例子中,θth是-0.1[deg/s]。此外,俯仰率阈值θth并不限定于该值。
驾驶辅助ECU30边使制动力分配比n逐渐减少(即,逐渐减少总制动力F向前轮侧的分配)边探索满足θ′>θth的条件的制动力分配比n。因此,驾驶辅助ECU30将“在满足θ′>θth的条件的制动力分配比n中最大的值”作为制动力分配比na来采用。
驾驶辅助ECU30将包括总制动力F和制动力分配比na在内的制动指示信号向制动ECU20发送。制动ECU20基于总制动力F和制动力分配比na,运算各车轮W*的目标制动力Fb*,并以各车轮W*的制动力成为对应的目标制动力Fb*的方式控制制动致动器21。
这样,制动力控制装置以特定状态(前端低头状态)的程度不大于规定的程度的方式预先调整制动力分配比na。因此,制动力控制装置能够抑制前端低头状态的程度变大。
此外,通过对(6)式进行积分,从而获得以下的(8)式。
【公式2】
并且,根据以下的(9)式和(10)式的关系,(8)式能够变换为以下的(11)式。
【公式3】
以后,将(11)式的右边的第1项的【数4】
-(l
表述为“A1”。将(11)式的右边的第2项的【数5】
-(l
表述为“A2”。将(11)式的右边的第3项的【数6】
-(l
表述为“A3”。将(11)式的右边的第4项的【数7】
-(l
表述为“A4”。将(11)式的右边的第5项的【数8】
{H-l
表述为“A5”。“A5”包括制动力分配比n。
并且,通过对(7)式进行积分,从而获得以下的(12)式。
【公式9】
并且,根据(9)式和(10)式的关系,(12)式能够变换为以下的(13)式。
【公式10】
以后,将(13)式的右边的第1项的【数11】
-(l
表述为“B1”。将(13)式的右边的第2项的【数12】
-(l
表述为“B2”。将(13)式的右边的第3项的【数13】
-(K
表述为“B3”。将(13)式的右边的第4项的【数14】
-(C
表述为“B4”。将(13)式的右边的第5项的【数15】
-{(tanθ
表述为“B5”。“B5”包括制动力分配比n。
(工作)
驾驶辅助ECU30的CPU(仅称为“CPU”。)每经过规定时间就执行图5所示的“减速开始/结束判定例程”。
此外,CPU通过每经过规定时间执行未图示的例程,从而从各种传感器43~44和各种开关61~64取得检测信号或者输出信号。
除此之外,CPU在开始ACC时执行未图示的例程,并将以下叙述的各种标志(X1和X2)和变量(i)的值设定为“0”。
若变为规定的时机,则CPU从图5的步骤500开始处理并进入至步骤501,判定在当前时刻ACC的工作状态是否为接通状态。在ACC的工作状态不是接通状态的情况下,CPU在该步骤501中判定为“否”,直接进入至步骤595并暂时结束本例程。
若假定ACC的工作状态是接通状态,则CPU在步骤501中判定为“是”,进入至步骤502,并判定第1标志X1的值是否为“0”。第1标志X1在其值为“1”时表示在ACC中执行减速控制,在其值为“0”时表示在ACC中未执行减速控制。
现在若假定第1标志X1的值是“0”,则CPU在步骤502中判定为“是”,进入至步骤503,并判定减速开始条件是否成立。减速开始条件如上述那样在条件B1与条件B2的任意一个成立时成立。
在减速开始条件不成立的情况下,CPU在步骤503中判定为“否”,直接进入至步骤595并暂时结束本例程。
与此相对地,在减速开始条件成立的情况下,CPU在该步骤503中判定为“是”并进入至步骤504,将第1标志X1的值设定为“1”。其后,CPU进入至步骤595并暂时结束本例程。由此,如后述的图6的例程所示,CPU开始减速控制。
若在如上述那样开始减速控制后CPU再次从步骤500开始图5的例程并进入至步骤502,则CPU在该步骤502中判定为“否”并进入至步骤505。CPU在步骤505中判定减速结束条件是否成立。减速结束条件如上述那样在条件C1与条件C2的任意一个成立时成立。
在减速结束条件不成立的情况下,CPU在该步骤505中判定为“否”,直接进入至步骤595,并暂时结束本例程。在该情况下,CPU继续进行减速控制。
与此相对地,在减速结束条件成立的情况下,CPU在该步骤505中判定为“是”,进入至步骤506,并将第1标志X1的值设定为“0”,将第2标志X2的值设定为“0”,将变量i的值设定为“0”。第2标志X2在其值为“0”时表示在后述的图6的例程中执行分配比调整控制,在其值为“1”时表示在图6的例程中没有执行分配比调整控制。变量i是用于对图6的例程的反复次数进行计数的计数变量。
并且,CPU每经过规定时间(dT)就执行图6所示的“减速控制例程”。CPU通过每经过规定时间(dT)执行未图示的例程,从而从制动ECU20取得各车轮W*的滑移比S*。
此外,从开始了减速控制的时刻起的时间t使用规定时间(dT)和变量i通过以下的(14)式来表示。
t=dT×(i-1)…(14)
若变为规定的时机,则CPU从图6的步骤600开始处理,进入至步骤601,并判定第1标志X1的值是否为“1”。在第1标志X1的值不是“1”的情况下,CPU在该步骤601中判定为“否”,直接进入至步骤695,并暂时结束本例程。
现在假定由于减速开始条件成立,所以在图5的例程的步骤504中将第1标志X1的值设定为“1”。在该情况下,CPU在步骤601中判定为“是”并依次执行以下叙述的步骤602~步骤604的处理。其后,CPU进入至步骤605。
步骤602:CPU将变量i自加1(i←i+1)。
步骤603:CPU通过将根据(14)式求出的时间t用于减速度信息,从而取得在当前时刻应使车辆SV产生的减速度Gb。而且,CPU将减速度Gb设定为目标加速度Gt(i)。
步骤604:CPU基于当前时刻的车速SPD和目标加速度Gt(i)等运算总制动力F(i)。例如,CPU通过将目标加速度Gt(i)和车速SPD用于检查表Map(Gt(i)、SPD),从而求出用于获得目标加速度Gt(i)的总制动力F(i)(即,F(i)=Map(Gt(i)、SPD))。上述的检查表存储于驾驶辅助ECU30的ROM。
接下来,CPU在步骤605中判定第2标志X2的值是否为“0”。当前时刻是在图5的例程的步骤504中将第1标志X1的值设定为“1”紧后的时刻,因此第2标志X2的值是“0”。因此,CPU在步骤605中判定为“是”,进入至步骤606,并判定变量i是否为“1”。
变量i是“1”,因此CPU在步骤606中判定为“是”并依次执行以下叙述的步骤607和步骤608的处理。其后,CPU进入至步骤609。
步骤607:CPU将制动力分配比n设定为标准分配比n_normal。
步骤608:CPU通过执行图7所示的“分配比运算例程”来运算制动力分配比n。对于分配比运算例程进行后述。
接下来,CPU在步骤609中判定规定的调整结束条件是否成立。调整结束条件是用于判定是否使分配比调整控制结束的条件,在以下的条件D1~条件D3全部成立时成立。
(条件D1):变量i大于“1”(i>1)。
(条件D2):制动力分配比n是标准分配比n_normal(n=n_normal)。
(条件D3):上次的目标加速度Gt(i-1)与这次的目标加速度Gt(i)之间的变化量的大小小于规定的变化量阈值Gvth(|Gt(i-1)-Gt(i)|<Gvth)。此外,Gvth小于减速度信息中的从“t=0”到“t=Tp2”为止的期间内的减速度Gb的变化量的大小。因此,在本例子中,从“t=0”到“t=Tp2”为止的期间内的条件D3不成立。
现在,变量i是“1”,因此调整结束条件不成立。因此,CPU在步骤609中判定为“否”并依次执行以下叙述的步骤610~步骤611的处理。其后,CPU进入至步骤695并暂时结束本例程。
步骤610:CPU将制动力分配比na设定为通过图7所示的例程运算出的制动力分配比n。
步骤611:CPU将包括总制动力F(i)和制动力分配比na在内的制动指示信号向制动ECU20发送。制动ECU20若接受制动指示信号,则根据上述的手法,基于总制动力F(i)和制动力分配比na运算各车轮W*的目标制动力Fb*。而且,制动ECU20以各车轮W*的制动力成为对应的目标制动力Fb*的方式控制制动致动器21。这样,CPU开始分配比调整控制。
若CPU再次开始图6的例程并进入至步骤606,则CPU判定为“否”并进入至步骤613。在步骤613中,CPU判定规定的滑移条件是否成立。滑移条件在至少一个车轮W*的滑移比S*大于规定的滑移比阈值Sth时成立。此外,作为滑移指标值,也可以使用车轮速度Vw*的每单位时间的减少量。因此,滑移条件也可以是关于至少一个车轮W*车轮速度Vw*的每单位时间的减少量的大小(绝对值)大于规定的变化量阈值时成立的条件。
现在若假定滑移条件不成立,则CPU在该步骤613中判定为“否”,并如上述那样依次执行步骤607~步骤611的处理。因此,CPU继续进行分配比调整控制。
假定如上述那样CPU在反复执行图6的例程的期间在步骤609中调整结束条件成立。在该情况下,CPU在步骤609中判定为“是”,并依次执行以下叙述的步骤614、步骤615以及步骤611。其后,CPU进入至步骤695并暂时结束本例程。
步骤614:CPU将第2标志X2的值设定为“1”。
步骤615:CPU将制动力分配比na设定为标准分配比n_normal。
步骤611:CPU将包括总制动力F(i)和制动力分配比na在内的制动指示信号向制动ECU20发送。
因此,CPU结束分配比调整控制。CPU将制动力分配比na设定为标准分配比n_normal来执行减速控制。
并且,当在CPU反复执行图6的例程的期间在步骤613中滑移条件成立的情况下,CPU也执行相同的处理。CPU在步骤613中判定为“是”,并如上述那样依次执行步骤614、步骤615以及步骤611。因此,即使在这种情况下,CPU也结束分配比调整控制。
若在CPU结束分配比调整控制后CPU再次开始图6的例程并进入至步骤605,则判定为“否”。其后,CPU如上述那样依次执行步骤615和步骤611的处理。因此,CPU将制动力分配比na维持在标准分配比n_normal,并且执行减速控制。
接下来,对CPU在步骤608中执行的处理(图7所示的分配比运算例程的处理)进行说明。以后,前缀字符串“s_”表示一次积分值,前缀字符串“ss_”表示二次积分值。例如,“s_A1”表示A1的一次积分值,“SS_A1”表示A1的二次积分值。
在进入至步骤608的情况下,CPU从步骤700开始图7所示的例程的处理,进入至步骤701,并判定变量i是否为“1”。在变量i为“1”的情况下,CPU在步骤701中判定为“是”,进入至步骤702,并执行初始化处理。具体而言,CPU将在本例程中使用的各种值如以下那样初始化。CPU进入至步骤795,其后,在图6的例程中进入至步骤609。
【公式16】
θ(1)=0
y(1)=0
s_A1(1)=0
ss_A1(1)=0
s_A2(1)=0
s_A3(1)=0
ss_A3(1)=0
s_A4(1)=0
s_A5(1)=0
ss_A5(1)=0
s_B1(1)=0
ss_B1(1)=0
s_B2(1)=0
s_B3(1)=0
ss_B3(1)=0
s_B4(1)=0
s_B5(1)=0
ss_B5(1)=0
CPU在反复执行图6的例程的期间再次进入至步骤608。CPU若进入至步骤701,则判定为“否”,并依次执行以下叙述的步骤703步骤705的处理。其后,CPU进入至步骤706。
步骤703:CPU使用以下的(15)式~(30)式来运算积分值。
【公式17】
s_A1(i)=s_A1(i-1)+A1(i)×dT…(15)
ss_A1(i)=ss_A1(i-1)+s_A1(i)×dT…(16)
s_A2(i)=s_A2(i-1)+A2(i)×dT…(17)
s_A3(i)=s_A3(i-1)+A3(i)×dT…(18)
ss_A3(i)=ss_A3(i-1)+s_A3(i)×dT…(19)
s_A4(i)=s_A4(i-1)+A4(i)×dT…(20)
s_A5(i)=s_A5(i-1)+A5(i)×dT…(21)
ss_A5(i)=ss_A5(i-1)+s_A5(i)×dT…(22)
s_B1(i)=s_B1(i-1)+B1(i)×dT…(23)
ss_B1(i)=ss_B1(i-1)+s_B1(i)×dT…(24)
s_B2(i)=s_B2(i-1)+B2(i)×dT…(25)
s_B3(i)=s_B3(i-1)+B3(i)×dT…(26)
ss_B3(i)=ss_B3(i-1)+s_B3(i)×dT…(27)
s_B4(i)=s_B4(i-1)+B4(i)×dT…(28)
s_B5(i)=s_B5(i-1)+B5(i)×dT…(29)
ss_B5(i)=ss_B5(i-1)+s_B5(i)×dT…(30)
步骤704:CPU使用以下的式(31)来运算俯仰角θ(i),并使用以下的式(32)来运算上位位移量y(i)。
【公式18】
步骤703:CPU使用以下的式(33)来运算俯仰率θ′(i)。而且,CPU将该运算出的俯仰率θ′变换为[deg/s]的单位的数值。
【公式19】
接下来,CPU若进入至步骤706,则判定规定的运算结束条件是否成立。运算结束条件在以下的条件E1与条件E2的任意一个成立时成立。
(条件E1):在步骤705中运算出的俯仰率θ′(i)大于俯仰率阈值θth(θ′(i)>θth)。
(条件E2):n=0。
此外,在制动力分配比n是“0”的情况下,将总制动力F全部分配给后轮(Wrl和Wrr)(即,Fr=F)。即使在不满足条件E1的情况下,也将总制动力F全部分配给后轮,因此能够抑制车辆SV变为特定状态(前端低头状态)。
在运算结束条件成立的情况下,CPU在步骤706中判定为“是”并进入至步骤795。其后,CPU在图6的例程中进入至步骤609。
与此相对地,在运算结束条件不成立的情况下,CPU在步骤706中判定为“否”并进入至步骤707。CPU在步骤707中使用以下的(34)式来设定制动力分配比n。Max函数是选择“n-dn”与“0”中的较大的一方的函数。dn是规定的正值,是分配比的调整量。
【公式20】
n←Max(n-dn,0)…(34)
其后,CPU如上述那样执行步骤703~步骤706的处理。如以上那样,在运算结束条件成立的情况下,CPU使制动力分配比n减少调整量dn,并执行步骤703~步骤706的处理。
这样,每当CPU执行步骤707的处理,CPU使制动力分配比n减少调整量dn。在图6的例程的步骤607中,将制动力分配比n设定为标准分配比n_normal。因此,制动力分配比n从标准分配比n_normal逐渐减少。A5和B5包括制动力分配比n,因此若n的值变化,则俯仰率θ′(i)的值也变化。CPU采用运算结束条件(条件E1)成立的时刻时的制动力分配比n作为制动力分配比na(步骤610)。因此,采用“在满足θ′(i)>θth的条件的制动力分配比n中最大的值”作为制动力分配比na。
(工作例)
使用图8来对制动力控制装置的工作例(模拟)进行说明。
<时刻t0>
在图8所示的例子中的时刻t0,CPU执行前车跟随控制。由于跟随对象车辆(a)减速,所以减速开始条件(具体而言,条件B2)成立。因此,CPU进行以下的处理。
处理1:CPU在图5的例程中将第1标志X1的值设定为“1”(步骤504)。
处理2:由于将第1标志X1的值设定为“1”,所以CPU在图6的例程中开始分配比调整控制(步骤601:是)。CPU执行步骤602~步骤611的处理。
<从时刻t0到时刻t2的期间>
在时刻t0到时刻t2的期间,CPU进行以下的处理。此外,在该期间减速结束条件不成立(步骤505:否)。并且,在该期间滑移条件不成立(步骤613:否)。
处理3:CPU在图5的例程中将第1标志X1的值维持在“1”。
处理4:CPU若在图6的例程中进入至步骤606,则判定为“否”并进入至步骤613。滑移条件不成立,因此CPU在步骤613中判定为“否”,并执行步骤607~步骤611的处理。至少条件D2不成立,因此调整结束条件不成立(步骤609:否)。CPU继续进行分配比调整控制。
在该期间,后轮制动力Fr相对于总制动力F之比(1-na)大于0.3。因此,总制动力F向后轮侧的分配大于将制动力分配比na设定为标准分配比n_normal的情况。特别是在时刻t1总制动力F向后轮侧的分配大于总制动力F向前轮侧的分配。
<时刻t2>
在时刻t2,CPU进行以下的处理。此外,在此刻,减速结束条件不成立(步骤505:否)。
处理5:CPU在图5的例程中将第1标志X1的值维持在“1”。
处理6:条件D1~条件D3全部成立。因此,CPU若在图6的例程中进入至步骤609,则判定为“否”,并执行步骤614、步骤615以及步骤611的处理。即,CPU结束分配比调整控制。而且,CPU将制动力分配比na设定为标准分配比n_normal来执行减速控制。
此外,在时刻t2之后,CPU若在图6的例程中进入至步骤605,则判定为“否”,并执行步骤615和步骤611的处理。即,CPU将制动力分配比na维持在标准分配比n_normal,并且执行减速控制。
接下来,对本实施方式的效果进行说明。图9是表示图8的工作例中的俯仰率θ′相对于时间的变化。现有装置(比较例)在车辆变为特定状态(前端低头状态)后以事后消除特定状态的方式调整制动力分配比。因此,在比较例中,如用图9的虚线表示的那样俯仰率θ′小于俯仰率阈值θth(-0.1[deg/s])。作为结果,特定状态的程度暂时变大。
与此相对地,本实施方式所涉及的制动力控制装置假定使车辆SV产生预先决定好的减速度Gb(=目标加速度Gt),以俯仰率θ′大于俯仰率阈值θth(-0.1[deg/s])的方式预先调整制动力分配比na。因此,俯仰率θ′不会大幅度地小于俯仰率阈值θth。因此,制动力控制装置能够抑制特定状态的程度变大。其结果是,能够减少驾驶员感到不舒适感的可能性。
并且,若俯仰率θ′是负值并且其大小|θ′|较大(即,若特定状态的程度变大),则车身VB在俯仰方向上每单位时间大幅度地变化。在该情况下,乘员使身体向与该车身VB的移动相反的方向挪动来取得平衡。乘员由于这样的身体的动作导致感到疲劳。与此相对地,制动力控制装置使用俯仰率θ′作为表示特定状态的程度的指标值。因此,能够有效地抑制每单位时间的车身VB的俯仰方向的变化。根据本实施方式,乘坐舒适性提高,从而能够减少乘员感到疲劳的可能性。
除此之外,若在滑移比S*超过滑移比阈值Sth的状况下调整制动力分配比na(特别是若通过使制动力分配比na减少而向后轮分配的制动力Fr变大),则车辆SV的举动有可能变得不稳定。制动力控制装置在滑移比S*大于滑移比阈值Sth的时刻以后将分配比设定为标准分配比n_normal。因此,能够抑制车辆SV的举动变得不稳定。
此外,本公开并不限定于上述实施方式,在本公开的范围内能够采用各种变形例。
(变形例1)
也可以使用俯仰率θ′以外的值作为表示特定状态的程度的指标值。例如,也可以使用俯仰角θ。在该情况下,条件E1也可以替换为以下的条件E1’。
条件E1’:在步骤704中运算出的俯仰角θ(i)大于俯仰角阈值θath(θ(i)>θath)。θath是规定的负值。
(变形例2)
俯仰率θ′的运算方法并不限定于上述的例子。例如,车辆SV也可以还具备加速度传感器和/或陀螺仪传感器。在该情况下,俯仰率θ′也可以基于由加速度传感器和/或惯性传感器(陀螺仪传感器)测定出的值来运算。
(变形例3)
分配比调整控制也可以用于ACC以外的驾驶辅助控制。分配比调整控制也可以用于以车辆SV的实际的加速度接近目标加速度的方式控制制动力的其他驾驶辅助控制。例如,分配比调整控制也可以用于自动制动控制。自动制动控制是在车辆SV的紧前行驶的前车停止时使车辆SV自动地停止的控制。在该情况下,在驾驶辅助ECU30的ROM预先储存有自动制动控制用的第2减速度信息。第2减速度信息表示减速度(负的加速度)Gc、与从开始减速的时刻起的时间t的关系。在第2减速度信息中,将减速度Gc设定于第1范围内(下限值Gth2以上的范围),并且将跃度的绝对值设定于第2范围内(上限值Jth2以下的范围)。在前车停止的情况下,驾驶辅助ECU30从第2减速度信息中取得在当前时刻应使车辆SV产生的减速度Gc,并将该取得的减速度Gc设定为目标加速度Gt。而且,驾驶辅助ECU30以车辆SV的加速度接近目标加速度Gt的方式(或者以一致的方式)使用制动ECU20来控制制动致动器21。
(变形例4)
制动装置并不限定于上述的油压式的装置。制动装置也可以是电动制动器(EMB:Electro-mechanical Brake)装置、或者能够通过轮内马达独立地控制车轮W*的制动力的装置。
- 制动力控制方法以及制动力控制装置
- 二轮车用制动装置的制动力控制方法及制动力控制装置