掌桥专利
首页
导航:
首页
>
其他类目不包含的电技术
>
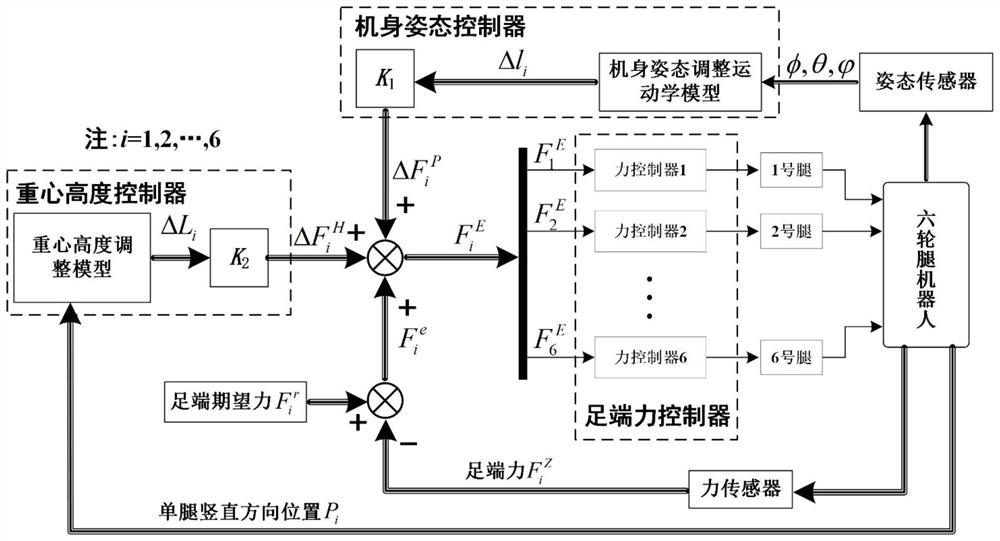
一种轮腿式机器人机身姿态及足端受力协同控制方法
一种轮腿式机器人机身姿态及足端受力协同控制方法
文献发布时间:2023-06-19 11:08:20
完整全部详细技术资料下载
相关技术
一种轮腿式机器人机身姿态及足端受力协同控制方法
基于同轴式轮腿结构的主动姿态与全轮转向协同控制方法
技术分类
农业;林业;畜牧业;狩猎;诱捕;捕鱼
焙烤;制作或处理面团的设备;焙烤用面团
屠宰;肉品处理;家禽或鱼的加工
其他类不包含的食品或食料;及其处理
烟草、雪茄烟、纸烟、吸烟者用品
服装
帽类制品
鞋类
服饰缝纫用品、珠宝
手携物品或旅行品
刷类制品
家具、家庭用的物品或设备、咖啡磨、香料磨、一般吸尘器
医学或兽医学、卫生学
救生、消防
运动、游戏、娱乐活动
本部其他类目中不包括的技术主题
一般的物理或化学的方法或装置
破碎、磨粉或粉碎、谷物碾磨的预处理
用液体或用风力摇床或风力跳汰机分离固体物料、从固体物料或流体中分离固体物料的磁或静电分离、高压电场分离
用于实现物理或化学工艺过程的离心装置或离心机
一般喷射或雾化、对表面涂覆液体或其他流体的一般方法
一般机械振动的发生或传递
将固体从固体中分离、分选
清洁
固体废物的处理、被污染土壤的再生
基本上无切削的金属机械加工、金属冲压
铸造、粉末冶金
机床、其他类目中不包括的金属加工
磨削、抛光
手动工具、轻便机动工具、手动器械的手柄、车间设备、机械手
手动切割工具、切割、切断
木材或类似材料的加工或保存、一般钉钉机或钉U形钉机
加工水泥、黏土或石料
塑料的加工、一般处于塑性状态物质的加工
压力机
纸品或纸板或类似纸的方式加工的材料制品制作、纸或纸板或类似纸的方式加工的材料的加工
层状产品
附加制造技术
印刷、排版机、打字机、模印机
装订、图册、文件夹、特种印刷品
书写或绘图器具、办公用品
装饰艺术
一般车辆
铁路
无轨陆用车辆
船舶或其他水上船只、与船有关的设备
飞行器、航空、宇宙航行
输送、包装、贮存、搬运薄的或细丝状材料
卷扬、提升、牵引
开启或封闭瓶子、罐或类似的容器、液体的贮运
鞍具、家具罩面
微观结构技术
纳米技术
无机化学
水、废水、污水或污泥的处理
玻璃、矿棉或渣棉
水泥、混凝土、人造石、陶瓷、耐火材料
肥料、肥料制造
炸药、火柴
有机化学
有机高分子化合物、其制备或化学加工、以其为基料的组合物
染料、涂料、抛光剂、天然树脂、黏合剂、其他类目不包含的组合物、其他类目不包含的材料的应用
石油、煤气及炼焦工业、含一氧化碳的工业气体、燃料、润滑剂、泥煤
动物或植物油、脂、脂肪物质或蜡、由此制取的脂肪酸、洗涤剂、蜡烛
生物化学、啤酒、烈性酒、果汁酒、醋、微生物学、酶学、突变或遗传工程
糖工业
使用化学药剂、酶类或微生物处理小原皮、大原皮或皮革的工艺,如鞣制、浸渍或整饰、其所用的设备、鞣制组合物(皮革或毛皮的漂白入D06L、皮革或毛皮的染色入D06P)
铁的冶金
冶金、黑色或有色金属合金、合金或有色金属的处理
对金属材料的镀覆、用金属材料对材料的镀覆、表面化学处理、金属材料的扩散处理、真空蒸发法、溅射法、离子注入法或化学气相沉积法的一般镀覆、金属材料腐蚀或积垢的一般抑制
电解或电泳工艺、其所用设备
晶体生长
组合技术
天然或化学的线或纤维、纺纱或纺丝
纱线、纱线或绳索的机械整理、整经或络经
织造
编织、花边制作、针织、饰带、非织造布
缝纫、绣花、簇绒
织物等的处理、洗涤、其他类不包括的柔性材料
绳、除电缆以外的缆索
造纸、纤维素的生产
道路、铁路或桥梁的建筑
水利工程、基础、疏浚
给水、排水
建筑物
锁、钥匙、门窗零件、保险箱
一般门、窗、百叶窗或卷辊遮帘、梯子
土层或岩石的钻进、采矿
一般机器或发动机、一般的发动机装置、蒸汽机
燃烧发动机、热气或燃烧生成物的发动机装置
液力机械或液力发动机、风力、弹力或重力发动机、其他类目中不包括的产生机械动力或反推力的发动机
液体变容式机械、液体泵或弹性流体泵
流体压力执行机构、一般液压技术和气动技术
工程元件或部件、为产生和保持机器或设备的有效运行的一般措施、一般绝热
气体或液体的贮存或分配
照明
蒸汽的发生
燃烧设备、燃烧方法
供热、炉灶、通风
制冷或冷却、加热和制冷的联合系统、热泵系统、冰的制造或储存、气体的液化或固化
干燥
炉、窑、烘烤炉、蒸馏炉
一般热交换
武器
弹药、爆破
测量、测试
光学
摄影术、电影术、利用了光波以外其他波的类似技术、电记录术、全息摄影术〔4〕
测时学
控制、调节
计算、推算、计数
核算装置
信号装置
教育、密码术、显示、广告、印鉴
乐器、声学
信息存储
仪器的零部件
特别适用于特定应用领域的信息通信技术
核物理、核工程
基本电气元件
发电、变电或配电
基本电子电路
电通信技术
其他类目不包含的电技术
其他专利
06120112812045