确定车辆的位置的方法
文献发布时间:2023-06-19 11:13:06
技术领域
本公开涉及确定车辆的位置的计算机实现的方法。
背景技术
可以为配备有传感器系统的车辆提供确定车辆的位置的方法,其中,该传感器系统包括至少一个传感器,该至少一个传感器接收从传感器系统的至少一个发射器发射并在车辆环境中朝向该至少一个传感器反射的电磁辐射。该方法包括以下步骤:确定包括多个检测点的至少一个扫描,其中,各个检测点是根据由至少一个传感器接收的并表示在车辆环境中的位置的电磁辐射来评估的;根据数据库确定预定义的地图,其中,该地图包括地图环境中的多个要素,该多个要素中的各个要素表示车辆环境中的多个静态地标中的相应静态地标,并且地图环境表示车辆环境;将多个检测点与预定义的地图的多个要素进行匹配;基于该匹配来确定车辆的位置。
车辆相对于诸如导航地图的预定义的地图的自定位或自我定位是自主驾驶和类似应用领域中的重要任务。车载雷达系统即使在恶劣的天气条件下也能够检测到如建筑物、树木、电线杆和其它车辆的对象。
由雷达系统获取的雷达检测结果(或其它检测点)可以用于在导航地图中定位车辆。可以从公共可用数据库收集导航地图。例如,导航地图可以是所谓的“开放街道地图(OpenStreetMap)”。另选地,导航地图可以由商业地图提供商提供。这样的地图通常特别准确。通常,可以基于车辆的给定位置从全球数据库(例如,从车辆的全球定位系统)获得导航地图。另选地,可以使用测距法来确定初步位置估计。
静态地标可以是已知的静态对象,即,基础设施对象或一直存在的对象,如建筑物的墙壁、屏障、栅栏、人行道边缘、电线杆、较大的植物、树木等。存储在数据库中的地图数据包括地标的简化数学表示,例如,呈延伸的几何对象(如,线条)的形式。多个要素中的各个要素包括与其在世界坐标系中的位置有关的信息。
术语“匹配”可以在评估雷达检测点与地图要素之间的对应性的意义上进行理解。为了进行匹配,可以应用所谓的扫描匹配算法。在EP 3 517 996A1中公开了扫描匹配算法的示例。在扫描匹配的上下文中,利用检测点与地图要素之间的对应性来确定车辆的位置。
尽管该方法可以使用车辆的雷达系统,但是应理解,也可以使用激光雷达系统的检测点而不是雷达系统的检测点来采用该方法。雷达检测点和激光雷达检测点的组合也是可能的。
针对匹配,可以将当前一组(例如,雷达)扫描的每个扫描投影到最近的地图要素(建筑物/墙壁)中。需要在投影之前识别最近的地图要素。如果扫描匹配算法是在包括更多的建筑物/墙壁的较大区域(例如,整个城市)内的更复杂的环境中执行的,或被递归/循环地应用于每个雷达扫描,则计算量增大,因此需要更复杂的方法来计算地图投影。
因此,与匹配相关联的问题是高计算负荷。
因此,需要提供一种更有效的方法来确定车辆的位置。
发明内容
本公开提供了一种计算机实现的方法、计算机系统和非暂时性计算机可读介质。在说明书和附图中给出了实施方式。
在一个方面,本公开涉及一种确定配备有传感器系统的车辆的位置的计算机实现的方法,其中,所述传感器系统包括至少一个传感器,所述至少一个传感器接收从所述传感器系统的至少一个发射器发射并且在车辆环境中朝向所述至少一个传感器反射的电磁辐射,其中,所述方法包括以下步骤:捕获包括多个检测点的至少一个扫描,其中,各个检测点是根据由所述至少一个传感器接收并且表示在所述车辆环境中的位置的电磁辐射来评估的;根据数据库确定预定义的地图,其中,该地图包括地图环境中的多个要素,所述多个要素中的各个要素表示所述车辆环境中的多个静态地标中的相应静态地标,并且所述地图环境表示所述车辆环境;将所述多个检测点与所述地图的所述多个要素进行匹配;基于所述匹配来确定所述车辆的所述位置;其中,所述预定义的地图还包括所述地图环境的多个部分到所述多个要素的空间指派,并且其中,所述空间指派用于所述匹配。
所述多个部分由布置成网格的空间位置限定,所述空间位置包括任何可能的检测点的位置。
空间指派允许在检测点与要素之间进行更高效的指派。这意味着,为了将给定检测点指派给要素中的一个或更多个要素,不必对所有要素进行详尽的搜索来例如找到距给定检测点最近的要素。相反,空间指派很容易给出给定检测点被指派给哪个要素的信息。在这方面,空间指派可以被认为是地图的附加层,该附加层是预先计算的(即,预定的),使得在方法的运行期间可以避免复杂的指派步骤。因此,所述方法使得车辆能够在任何类型的环境中并且尤其是在城市环境中特别高效地自定位。在实验中,已经发现所提出的方法在时间方面比传统的扫描匹配算法要好35%。
应理解,传感器系统的发射器可以在确定一个或更多个扫描期间发射电磁辐射。在一个示例中,传感器系统可以是雷达传感器系统,并且检测点可以是雷达检测点。
所述匹配包括:针对所述多个检测点中的相应检测点,识别所述地图环境的所述多个部分中的相应部分,所述地图环境的所述多个部分中的所述相应部分表示所述车辆环境的包括由所述多个检测点中的所述相应检测点表示的位置的部分;识别所述多个要素中的被指派给所述地图环境的所述多个部分中的所识别的相应部分的相应要素;将所述多个要素中的所识别的相应要素指派给所述多个检测点中的所述相应检测点。可以针对多个检测点中的全部或一些检测点执行这些步骤。可以理解,因为预定义的地图已经包括空间指派,所以可以以低的计算负荷来执行这些步骤。具体地,基于空间指派来执行将要素指派给检测点。该指派可以通过地图的空间指派完全预定。
可以使用利用所述方法中的超过一种的方法来预定空间区段的混合模式,以避免在算法执行期间计算距离。
通常应理解,地图环境的一部分优选地仅被指派给地图的一个单个要素。然而,可以将地图环境的一部分指派给超过一个要素。这对于部分重叠的要素可能很有用。例如,拐角点可以是两个连接线条的端点,其中,线条形成地图的要素。
在说明书和附图中规定了本发明的有利实施方式。
根据一实施方式,预定义的地图包括多个空间区段的定义,该多个空间区段中的各个空间区段表示地图环境的部分并且被指派给多个要素中的相应要素。可以将空间区段配置成所谓的Voronoi区段或单元。Voronoi区段形成Voronoi图,该Voronoi图可以用作地图的附加层。通常,Voronoi图被划分成检测点的区域,所述检测点相对于地图的所有要素(例如,点或线条)距相应要素距离最近。Voronoi图可以给出将检测点指派给距其最近的地图要素的概率。检测点与其对应的地图要素之间的距离可以通过距离度量(例如,欧几里德距离)来给出。
可以以不同的方式来限定空间区段,例如,通过形成网格的多个(离散)位置,例如像图像的像素。这些位置是按组构造的,其中,相应组的各个位置具有到地图的一个或更多个要素的相同指派。因此,形成了空间区段。另选地或附加地,空间区段可以由空间区段的拐角点限定,其中,拐角点由区段的边界线条连接。在下面的公开中可以找到用于限定并确定空间区段的另外的和类似的方法:Burnikel,Christoph,Kurt Mehlhorn,and StefanSchirra:"How to compute the Voronoi diagram of line segments:Theoretical andexperimental results."European Symposium on Algorithms.Springer,Berlin,Heidelberg,1994。
用于确定空间区段的一种方式是将地图要素(例如,线条)离散化。然后,可以使用Fortune的算法来计算被创建在要素(例如,线段)上的点的Voronoi单元,以预先计算线条指派。为此目的,由同一线条贯穿(intersect)的Voronoi单元被连接。最后,线段Voronoi单元的所有边界索引都被存储,并且可以在扫描匹配算法期间通过检查检测点被指派给哪个多边形(即,空间区段)而被评估。该方法的优点是提供了非常准确的空间区段边界(即,Voronoi单元边界)。
根据一实施方式,匹配是基于多个要素中的所识别的相应要素以及多个检测点中的被指派了所述多个要素中的所识别的相应要素的相应检测点进行的。指派可以仅基于空间指派,即,被指派给地图的包括给定检测点的部分的要素也被指派给给定检测点。然而,可以并入另外的规则,例如,将要素指派给给定检测点要求要素与给定检测点之间的距离低于预定义的阈值。以这种方式,有噪声的检测点可以被过滤掉,以使其不影响匹配。
根据一实施方式,所述方法包括以下步骤:基于空间指派来确定多个检测点中的相应检测点的至少一个置信度值,其中,至少一个置信度值表示多个检测点中的相应检测点被指派给多个要素中的相应要素的概率,并且其中,匹配是基于至少一个置信度值进行的。换句话说,检测点可以根据置信度值与一个或更多个要素进行匹配。在一个示例中,可以针对相应检测点确定多个置信度值,所述多个置信度值中的各个置信度值表示相应检测点被指派给多个要素中的相应要素的概率。
根据一实施方式,至少一个置信度值是基于针对多个检测点中的相应检测点的蒙特卡洛模拟确定的。这可以基于姿势的不确定性(例如,车辆的初步位置的位置和航向的标准偏差)和/或检测点不确定性(例如,雷达检测点的角度和范围的标准偏差)来进行。
根据一实施方式,至少一个置信度值被转换成指数加权因子,并且其中,匹配包括按照指数加权因子进行加权。指数加权有效地集中于主要影响并减轻离群值的影响。然而,其它加权方案也是可能的。
根据一实施方式,预定义的地图还包括多个距离值,所述多个距离值分别表示地图环境的被指派给多个要素的多个部分与要素之间的距离。距离值可以用于匹配以便进一步提高所述方法的效率。距离可以被限定成欧几里德距离。如上面进一步指出的,所述部分可以由空间区段限定。
根据一实施方式,针对地图环境的多个部分中的相应部分,空间指派标识多个要素中的距地图环境的多个部分中的相应部分的距离最小的相应要素。因此,地图的距离中的各个距离可以是最小距离(例如,由检测点在要素上的正交投影限定的)。在一个示例中,要素可以是线条,因此检测点被投影到线条上。
根据一实施方式,匹配包括通过使经变换的检测点与借助于空间指派被指派给多个经变换的检测点的要素之间的距离最小来确定刚性变换函数,其中,经变换的检测点是多个检测点中的借助于刚性变换函数变换的相应检测点。
根据一实施方式,地图的至少一个要素包括延伸的几何对象,尤其是线条或面,优选是直线或平面。在一个示例中,要素由线条形成,其中,线条中的各个线条被限定成在线条的两个在空间上限定的端点之间延伸。线条可以是两个端点之间的矢量。
根据一实施方式,匹配包括粒子滤波。粒子滤波对于车辆的全局自定位而言是强大的。由于粒子滤波的计算负担很大,因此使用所提出的地图的空间指派大大降低了计算负荷。针对使用粒子滤波的全局自定位,加权过程可能在计算上是密集的。针对权重计算,基于每一个检测点的角度将粒子投影到地图中。将粒子与其投影之间的距离和检测范围进行比较。在一个示例中,地图可以是停车场地图,其中,初始化(寻找车辆的初始姿势)需要≈30000个粒子的分布。考虑到粒子的这个数量以及各个雷达扫描最多128个检测点的检测点数量,针对实时应用,很难在可接受的时间内执行加权过程。将空间指派应用于指派和距离计算大大缩短了计算时间(测试表明时间缩短了99%)。这种相当大的计算时间缩短允许基于粒子滤波的全局自定位的进一步实时开发,尤其是当未知初始姿势的区域变小(不是整个停车场那样大)时。
根据一实施方式,所述方法还包括以下步骤:确定车辆的初步位置,并且其中,确定车辆的位置包括借助于刚性变换函数来对初步位置进行变换。
根据一实施方式,所述方法还包括基于车辆的运动模型来确定位置,尤其是初步位置,其中,运动模型是基于来自车辆的至少一个运动传感器的至少一个测量结果和/或基于至少一个扫描的多个检测点中的至少一些检测点来确定的。运动模型可以是描述车辆随时间推移的轨迹的模型。可以利用某一值初始化该模型,然后根据车辆的运动测量结果对该模型进行定期更新。在这方面,优选地基于来自车辆的至少一个运动传感器的至少一个测量结果和/或基于检测点中的至少一些检测点来确定运动模型。来自运动传感器和雷达系统的测量结果的组合可以进一步提高所述方法的准确性。作为使用运动模型的另选方式,可以使用合适的定位系统,例如基于DGPS(差分全球定位系统)。
来自至少一个运动传感器的测量结果可以包括车辆的速度和/或偏航率,其中,车辆优选地包括对应传感器设施。这也称为“航位推算(dead-reckoning)”测量。优选地,基于车轮速度传感器(每时间跨度的车轮旋转)测量结果和/或偏航率传感器测量结果来确定车辆的速度和/或偏航率。已经发现,在某些条件下(例如,在强转向操纵期间),单独进行的航位推算测量结果提供车辆位置的不准确的估计。由于这个原因,基于航位推算的估计可以表示车辆位置的初步估计。
车辆的位置可以包括表示车辆的位置和取向的坐标。
在另一方面,本公开涉及一种计算机系统,所述计算机系统被配置成执行本文描述的计算机实现的方法的多个或全部步骤。计算机系统可以被连接至或可连接至车辆的传感器或传感器系统,其中,该传感器或传感器系统可以被配置成至少执行确定至少一个扫描的方法步骤。传感器可以是传感器单元的一部分,该传感器单元可以是雷达传感器单元或激光雷达传感器单元。
计算机系统可以被配置成执行本文公开的其它方法步骤,尤其是确定预定义的地图、对地图进行变换、匹配和/或确定位置。相关的方法步骤也可以由计算机系统执行。计算机系统还可以连接至或可连接至车辆的运动传感器或定位系统,以便例如通过使用车辆的运动模型来确定车辆的初步位置。计算机系统可以形成或可以是车辆的计算单元或系统(例如车辆的电子控制单元(ECU))的一部分。
计算机系统可以包括处理单元、至少一个存储器单元和至少一个非暂时性数据存储部。非暂时性数据存储部和/或存储器单元可以包含计算机程序,所述计算机程序用于指示计算机执行本文描述的计算机实现的方法的多个或全部步骤或方面。非暂时性数据存储部和/或存储器单元可以包括数据库,在该数据库中存储了用于确定预定义的地图的地图数据。
在另一方面,本公开涉及一种车辆,该车辆配备有:传感器系统,该传感器系统被适配成接收从传感器系统的至少一个发射器发射并在车辆环境中朝向该传感器系统反射的电磁辐射;以及计算机系统,该计算机系统基于所发射的和所反射的辐射来确定车辆的位置。
在另一方面,本公开涉及一种非暂时性计算机可读介质,该非暂时性计算机可读介质包括用于执行本文描述的计算机实现的方法的多个或全部步骤或方面的指令。计算机可读介质可以被配置成:诸如光盘(CD)或数字通用盘(DVD)的光学介质;诸如硬盘驱动器(HDD)的磁性介质;固态驱动器(SSD);诸如闪速存储器的只读存储器(ROM);等。此外,计算机可读介质可以被配置成能够经由诸如互联网连接的数据连接访问的数据存储部。计算机可读介质可以例如是在线数据储存库或云存储部。
本公开还涉及一种计算机程序,该计算机程序用于指示计算机执行本文描述的计算机实现的方法的多个或全部步骤或方面。
附图说明
本文结合附图描述本公开的示例性实施方式和功能,附图示意性地示出了:
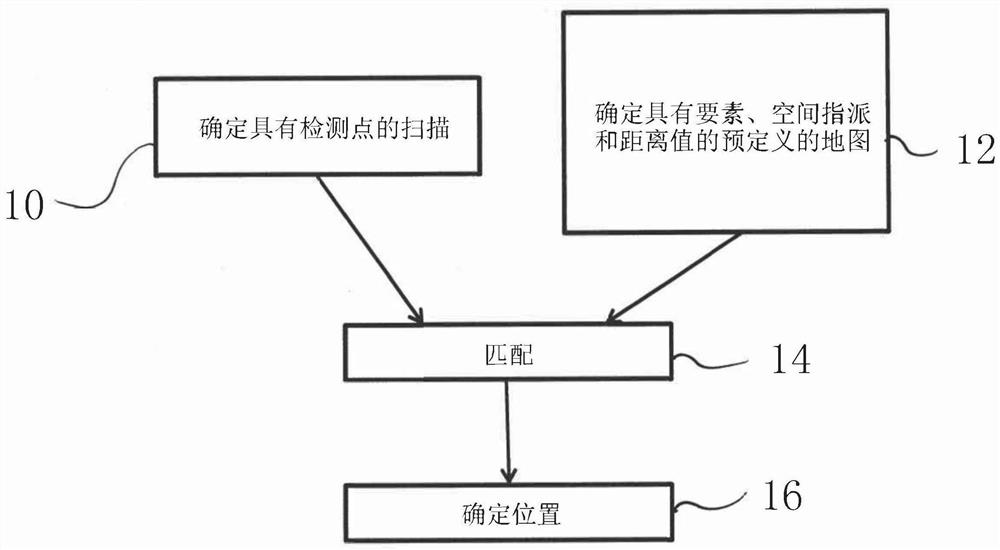
图1是用于确定车辆的位置的方法的框图;
图2是示例性检测点与被指派给该检测点的线条之间的距离;
图3是用于确定来自图2的距离并用于确定刚性变换函数的数学表达式;
图4是地图的被指派给线条的示例性空间区段;
图5是来自图4的作为线条图的空间区段;
图6是来自图4的地图的包括地图的线条的一部分、地图的具有被指派给线条的空间区段的一部分以及地图的表示地图环境与线条之间的距离值的一部分;
图7是地图的具有被指派给线条的空间区段并且具有给定检测点的多个样本的部分。
具体实施方式
图1描绘了用于确定车辆的位置的方法的框图。该方法可以由车辆的计算机系统(未示出)来执行。在框10,确定多个扫描,该多个扫描中的各个扫描包括多个检测点。在框12,根据数据库确定预定义的地图,其中,该地图包括多个要素,该多个要素中的各个要素表示静态地标。数据库存储在计算机系统的非暂时性存储介质中。在下文中,假定地图的要素由线条形成。然而,其它类型的要素也是可能的。
数据库包括大区域的地图数据,其中,地图是通过获取地图数据的与车辆的初步位置相对应的一部分来确定的。换句话说,地图包括与当前车辆环境相对应的地图环境中的线条。地图还包括地图环境的多个部分到地图要素的空间指派。具体地,地图环境由多个位置(例如,网格)表示,其中,该多个位置中的各个位置被指派了地图的一线条。该多个位置是扫描的检测点的可能的位置。地图还包括多个位置中的各个位置的距离值。距离值分别给出所述位置与所指派的线条之间的最小距离。将关于图2和图3进一步描述这一点。
在框14中,在检测点与地图要素之间进行匹配。预定义的地图的空间指派用于该匹配,并允许高效地进行匹配。针对给定检测点,识别地图环境中的对应位置,这可以包括检测点的一个或更多个坐标到地图环境中的最近位置的坐标的一个或更多个取整运算(rounding operation)。识别位置的其它方式也是可能的。在空间指派的基础上,被指派给该位置的要素也被指派给检测点。无需详尽搜索地图的所有要素。而是,可以使用空间指派轻松地识别给距定检测点最近的要素,该最近的要素是预定义的地图的一部分。
在框16,基于匹配来确定车辆的当前位置。这可以包括利用来自匹配的信息(尤其是刚性变换函数)来更新初步位置。
图2示出了被指派给地图的要素18的两个示例性检测点P和P’。针对检测点P和P’两者,要素18被认为是最近的要素。要素18是线段S,线段S在第一端点L
使用公式20来计算地图的多个部分与地图要素(例如,要素18)之间的空间指派。结果如图4所示,图4示出了示例性地图24,该示例性地图24包括地图环境26中的多个要素(例如,要素18)。将地图环境26划分成空间区段28,这些空间区段在图4中以不同的灰度级表示,并且形成了地图环境26的多个部分。图5示出了没有灰度级的空间区段,例如,参见区段28和28’。将空间区段分别指派给地图环境26中的线条。例如,将空间区段28指派给线条18,线条18是距空间区段28内所有点的距离最小的线条。空间区段28可以基于覆盖地图环境26的位置的规则网格而离线地确定(例如,在进行图1描述的方法之前)。针对各个位置,使用公式20来确定距地图环境26中所有线条(即,要素)的最小距离。然后选择对于所有线条的所有距离值中的最小值,并将相应线条指派给相应位置。以此方式,针对网格的各个点计算空间指派,即,将各个位置指派给最近的线条。将空间指派作为地图24的附加层存储成查找表。另外,针对多个位置中的各个位置,将对应距离值作为地图的另一附加层存储。在运行期间,参见图1的框10、框12和框14,针对多个检测点中的各个检测点对地图进行评估。例如,如果给定检测点P位于空间区段28内,则通过使用地图的空间指派,容易将线条18确定为地图的所有线条中的最近的线条。另外,距离值d可以从地图得知。然后可以在检测点与所指派的线条之间进行匹配,其中,由于空间指派和距离值(所述空间指派和距离值形成预先计算的数据),整个匹配过程非常高效。
匹配14包括通过使图3的表达式22最小来确定刚性变换函数。表达式22是在地图的N个线条和M个检测点d
图6示出了地图24的具有地图24的线条(例如,线条18)的部分30。线条表示停车场级的墙壁。该部分30也可以被视为地图24,其中,空间指派是该地图的附加层或一部分。图6示出了地图24的另一部分32,该地图24与图4的具有灰度的空间区段但不具有线条的地图24相对应。图6包括地图24的另一部分34,该另一部分34表示地图环境26与线条之间的作为颜色强度的距离值,即,针对地图部分34中的给定点,颜色强度指示根据公式20距最近的线条的距离。距离值形成地图24的另一附加层。
10 框
12 框
14 框
16 框
18 要素
20 公式
22 公式
24 地图
26 地图环境
28 空间区段
28’ 空间区段
30 地图部分
32 地图部分
32’ 地图部分
34 地图部分
36 放大的地图部分
38 样本
40 传播的误差椭圆
d 距离
P 检测点
P’ 检测点
S 线段
- 车辆位置确定装置、车辆位置确定系统以及车辆位置确定方法
- 铁道车辆的行驶位置确定系统、行驶位置确定装置以及行驶位置确定方法