一种太阳光自跟踪装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于太阳能发电领域,尤其涉及一种太阳光自跟踪装置。
背景技术
太阳能是一种清洁可再生能源,地球表面每年接受太阳的辐射量达5.4×1024J,相当于1.8×1014t标准煤。若将其中的0.1%按转换率5%转换为电能,每年发电量可达5600TW·h,相当于目前全世界能耗的40倍,因此人类正在开发研究如何利用太阳能。太阳能应用具有广阔的市场前景。
纵观太阳能设备,基本上采用固定式安装,比如太阳能路灯、太阳能热水器、太阳能发电厂等等,由于太阳每天自东向西,因此,在一天内,对固定安装的太阳能极板而言,只有在某个角度正对太阳,不能全天候捕捉太阳的位置。这种固定式安装的太阳能设备,由于在一天中,正对太阳的时间比较短,因此太阳能利用效率低。
从上世纪九十年代以来,国内外不少专家学者相继开展了太阳跟踪,如1990年国家气象局计量站,研制了FST型全自动太阳跟踪器,1994年《太阳能》杂志介绍了单轴液压自动跟踪器。从目前太阳跟踪方式看主要有“光电跟踪和日轨跟踪”两种。光电跟踪是以感光元件检测光的强度,通过伺服调整机构实现对太阳光的跟踪,该跟踪方案,灵敏度高,结构简单,但易受天气影响,不能判断太阳光的方向,不能处理天气变化情况。如太阳突然从云层中出来,作习时间固定等等,缺乏人工智能。日轨跟踪,是根据计算出的太阳的子午线,通过双轴伺服调整机构实现对太阳光的跟踪,该跟踪方案,除了对机械结构精度要求高,实时跟踪所消耗的能量较大外,最主要的问题是太阳子午线只是一年中太阳运行的一般规律,与实际需要有差距。
本世纪以来,光伏产业得到空前发展,太阳能路灯、太阳能发电厂、太阳能热水器等等遍布我国城乡。有一批科技工作者在研究太阳光跟踪,然而,到现在仍未走向应用,原因固然是多方面的,但最根本的原因是跟踪技术不理想,跟踪成本太高。
通过上述分析,现有技术存在的问题及缺陷为:
(1)固定式安装的太阳能极板,一天内,极板正对太阳的时间较短,太阳能得不到充分的利用。
(2)采用光电传感器检测光照强度,缺乏对太阳光方位的判断,只能实现光强度跟踪,跟踪效率不高。
(3)太阳光跟踪装置的成本较高,难以推广应用。
解决以上问题及缺陷的难度为:
太阳光跟踪装置涉及传感器技术、机械运动控制、计算机信息处理技术等多学科知识,需要有一支融合多学科知识的团队。
目前,太阳能应用产品有太阳能路灯、太阳能发电厂、太阳能热水器等等,产品的规格和尺寸大小不一,缺乏标准的规范。
解决以上问题及缺陷的对策:
把光电检测技术与信息处理技术进行融合,通过四象限传感器检测四个点的光强度,利用信息技术分析和判断光的方向,发出跟踪指令,实现快速跟踪。
把光强度跟踪与时间跟踪相结合,利用算法,分析太阳光的变化,滤除干扰,实现智能跟踪。
针对具体的太阳能应用产品,研发跟踪装置,并对实际的节能进行测试,正确处理好成本、跟踪之间的关系。坚持以节能为目标,以跟踪为手段,正确处理好跟踪和成本的关系。
解决以上问题及缺陷的意义为:
解决以上问题及缺陷,一方面可以实现太阳光智能跟踪,另一方面,为产品走向市场奠定基础。从上世纪九十年代至今,研究太阳光跟踪的人不少,但产品没有走向市场的主要原因是产品结构复杂,强调了跟踪,忽视了成本。
发明内容
针对现有技术存在的问题,本发明提供了一种太阳光自跟踪装置。
本发明是这样实现的,一种太阳光自跟踪装置,包括:四象限光检测传感器,实时检测太阳光强度,并将检测的所述太阳光强度信号输送至信号处理器,所述信号处理器对接收的信号进行处理后输送至控制器的A/D转换端;
所述A/D转换端对接收的信号进行A/D转换,将模拟量变成数字量;
然后所述控制器对信号进行分析和比较,按照时间和光强原则,对二自由度旋转装置发出控制信号;
所述四象限光检测传感器和光伏极板水平安装在所述二自由度旋转装置上,按时间和光强度原则,所述二自由度旋转装置先进行水平跟踪,再进行垂直跟踪。
进一步,所述四象限光检测传感器中均匀分布四个光敏电阻,用于检测太阳光的强度,两块相互垂直的隔板,配合所述光敏电阻检测光的方向;太阳光照射光敏电阻,光敏电阻的电阻发生变化,输出电压U
光从某一方向照射,隔板会挡住部分光线,因此,照射在四个光敏电阻的光线强度不一样,所以,测得的输出电压值也不一样。从而CPU通过比较水平方向和垂直方向的所测电压值,确定太阳的方位。
进一步,所述的控制器将四象限光检测传感器测得的电压值进行A/D转换,将模拟信号转化为数字信号,通过对数字分析,得出当前的光强度以及太阳的方位;通过算法,发出水平和垂直跟踪信号。
进一步,所述控制器对四象限光检测传感器测得的电压值,经信号处理器处理,输送到控制器进行A/D转换,得到四象限光照强度的A/D转换值。并进行比较,水平方向的值=(D
进一步,所述控制器对旋转角度受水平方向光强度差值控制的水平舵机、旋转角度受垂直方向光强度差值控制垂直舵机的状态进行控制。
进一步,所述按时间和光强原则包括:
时间原则:装置设有日历,系统根据一年内太阳子午线的运行规律,自动调整装置春、夏、秋、冬的工作时间;根据一天内太阳运行规律,自动调整太阳光跟踪频率。
光强度原则:根据光强度,自动跟踪太阳位置。
本发明的另一目的在于提供一种太阳光自跟踪装置,所述太阳光自跟踪装置包括四象限光检测传感器、信号处理器、控制器和二自由度旋转装置;
所述二自由度旋转装置包括控制垂直方向旋转的舵机、控制水平方向旋转的舵机及支架。
所述四象限光检测传感器水平安装在二自由度旋转装置的支架上;
所述四象限光检测传感器的输出端连接信号处理器的输入端,所述信号处理器的输出端连接控制器的A/D转换电路输入端;
所述控制器输出端(3-1)连接控制垂直方向旋转的舵机,所述控制器输出端(3-2)连接控制水平方向旋转的舵机。
进一步,所述四象限光检测传感器上对称分布四个光敏电阻,并用两块垂直隔板分开。
进一步,所述控制器包括A/D转换器、时钟电路、CPU和存储器,在程序控制下不断读取所述四象限光检测传感器的输出电压值,通过分析和比较光敏电阻检测的电压值,判断太阳光强度和太阳方向,按时间和光强度两个原则,向控制垂直方向旋转的舵机、控制水平方向旋转的舵机发出控制信号;
所述控制垂直方向旋转的舵机和控制水平方向旋转的舵机,接收控制器指令,并带着所述四象限光检测传感器和光伏发电板,进行水平方向和垂直方向旋转,实现对太阳光智能跟踪。
本发明的另一目的在于提供一种太阳能发电装置,搭载所述的太阳光自跟踪装置。
结合上述的所有技术方案,本发明所具备的优点及积极效果为:
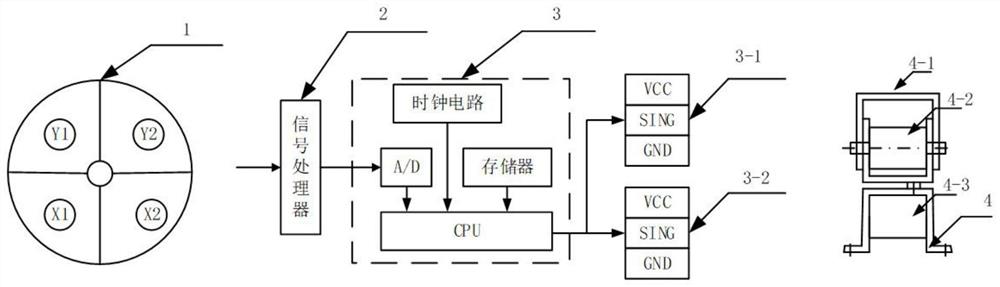
本发明提供的太阳光自跟踪装置由四象限光检测传感器1(以上简称光检测传感器),信号处理器2,控制器3和二自由度旋转装置4组成。传感器1水平安装在二自由度旋转装置4的支架4-1上,传感器1的输出连接信号处理器2的输入,信号处理器2的输出连接控制器3的A/D转换电路输入,控制器3的输出端3-1接二自由度旋转装置4的垂直方向旋转舵机4-2,控制器3的输出端3-2接二自由度旋转装置4的水平方向旋转的舵机4-3。传感器1上,对称分布四个光敏电阻,并有均分的两块垂直隔板(其结构详见附图1)。控制器3内含A/D转换器、时钟电路、CPU和存储器,系统在程序控制下不断读取传感器的值,通过分析和比较光敏电阻检测的电压值,判断太阳光强度和太阳的方向,按时间和光强度两个原则,向舵机发出控制信号。二自由度双轴旋转装置4(其结构详见附图2)上的舵机,接收到控制器指令,并带着传感器1和光伏发电板,进行水平方向和垂直方向旋转,实现对太阳光智能跟踪。本发明应用在太阳能发电(太阳能路灯、太阳能发电厂等)领域后,太阳能极板能实时跟踪太阳光,太阳光的利用率明显得到提高,项目研究具有经济效益和社会效益。
本发明实现了太阳光高质量的智能追踪,提高了太阳能利用率。采用时间和光强度原则,正确处理了跟踪和运行成本的关系。采用了模块化的设计,结构简单,便于市场推广应用。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图做简单的介绍。
图1是本发明实施例提供的太阳太跟踪系统框架图。
图1中,1、四象限光检测传感器;2、信号处理器;3、控制器;3-1、控制器输出端;3-2、控制器输出端;4、二自由度旋转装置;4-1、支架;4-2、控制垂直方向旋转的舵机;4-3、控制水平方向旋转的舵机。
图2是本发明实施例提供的四象限光检测传感器示意图。
图2中,1-1、底板;1-2、水平隔板;1-3、安装孔;1-4、光敏电阻;1-5、垂直隔板。
图3是本发明实施例提供的二自由度旋转装置示意图。
图3中,4-1、太阳极板安装支架;4-2、控制垂直旋转舵机;4-3、控制水平旋转舵机;4-4、安装孔。
图4是本发明实施例提供的光强度和光方向测量原理。
图4中,A、为太阳光检测电路,B、太阳与传感器位置的关系。
图5是本发明实施例提供的太阳太跟踪系统工作流程图。
图6是本发明实施例提供的太阳子午线效果图。
图7是本发明实施例提供的自跟踪光伏路灯图。
图7中,1、四象限光检测传感器;5、光伏极板;6、垂直方面旋转支架;7、垂直旋转轴;4-2、控制垂直方向运动的舵机;8、水平旋转轴;4-3、控制水平方向运动的舵机;9、安装板。
图8是本发明实施例提供的自跟踪太阳能发电厂示意图。
图8中,1、四象限光检测传感器;4-2、控制垂直方向运动的舵机;5、光伏极板;7、垂直旋转轴。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例,仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
本发明实施例提供一种太阳光自跟踪装置,包括:四象限光检测传感器实时检测太阳光,并将检测的所述太阳光输出信号至信号处理器,所述信号处理器对接收的信号进行处理后发送控制器的A/D转换端;
所述A/D转换端对接收的信号进行A/D转换,将模拟量变成数字量;
然后所述控制器对信号进行分析和比较,再向二自由度旋转装置发出控制信号;
所述四象限光检测传感器和光伏极板水平安装在所述二自由度旋转装置上,按时间和光强原则,所述二自由度旋转装置先进行水平跟踪,再进行垂直跟踪。
如图1所示,本发明实施例提供的太阳光自跟踪装置包括:四象限光检测传感器1(详见附图2),信号处理器2,控制器3和二自由度旋转装置4(见附图3)。
四象限光检测传感器1水平安装在二自由度旋转装置4的支架4-1上,传感器1的输出连接信号处理器2的输入,信号处理器2的输出连接控制器3的A/D转换电路输入,控制器输出端3-1接二自由度旋转装置的控制垂直方向旋转的舵机4-2,控制器输出端3-2接二自由度旋转装置的控制水平方向旋转的舵机4-3。
如图2所示,四象限光检测传感器1包括:底板1-1、水平隔板1-2、安装孔1-3、光敏电阻1-4、垂直隔板1-5;
四象限光检测传感器1上对称分布四个光敏电阻1-4,并用两块垂直隔板1-5分开。
在本发明中,控制器3内含A/D转换器、时钟电路、CPU和存储器,系统在程序控制下不断读取传感器的值,通过分析和比较光敏电阻检测的值,判断太阳光强度和方向,按时间和光强度两个原则,向舵机发出控制信号。
如图3所示,二自由度双轴旋转装置4包括:
太阳极板安装支架4-1、控制垂直旋转舵机4-2、控制水平旋转舵机4-3、安装孔4-4,控制垂直旋转舵机4-2、控制水平旋转舵机4-3接收到控制器,并带着四象限光检测传感器1和光伏发电板,进行水平方向和垂直方向旋转,实现对太阳光智能跟踪。
在本发明中,四象限光检测传感器1实时检测太阳光,输出信号接信号处理器2,信号处理器2对信号进行处理后送控制器的A/D转换端。系统在程序控制下,对信号进行A/D转换,将模拟量变成数字量,然后对信号进行分析和比较,再向二自由度旋转装置发出控制信号。四象限光检测传感器1和光伏极板水平安装在二自由度旋转装置4上,系统按时间和光强原则,先进行水平跟踪,再进行垂直跟踪。
在本发明中,四象限光检测传感器1包括的四个均匀分布的光敏电阻用于检测太阳光的强度,两块垂直隔板,配合光敏电阻检测光的方向(详见附图4)。当太阳光照射在光敏电阻,光敏电阻的电阻会发生变化,输出电压U
将四象限光敏电阻测得的电压值进行A/D转换,将模拟信号转化为数字信号,通过对数字分析,得出当前光强差值及太阳的方位。通过算法,发出水平和垂直跟踪指令。
本发明中,系统控制器中设有日历,在程序控制下,系统根据一年内太阳子午线的运行规律,自动调整装置春、夏、秋、冬的工作时间;根据一天内太阳运行规律,自动调整太阳光跟踪频率;根据光强度,自动调整对太阳光的跟踪。
在本发明中,控制器3对四象限光照强度的A/D转换值进行比较,水平方向的值=(D
舵机的控制信号来源于控制器,水平舵机旋转角度受水平方向光强差值控制,垂直舵机旋转角度受垂直方向光强差值控制。
下面结合具体实施例对本发明技术方案作进一步描述。
实施例1
在本发明中,由带垂直隔板的四象限太阳光检测传感器检测光的强度,通过信号处理电路将光信号转化成电信号,电信号送控制器的A/D转换,A/D转换将模拟信号转化为数字信号,系统在程序控制下,对A/D转换数据进行分析和判断,结合系统设定的时间原则,向执行机构发出跟踪命令。二自由度旋转装置在接到命令后,先在水平旋转一定角度(转角与光强的差值有关,差值大转角大),再对光强进行检测,直到水平跟踪到位。水平跟踪完成后,再进行垂直方向跟踪,垂直方向也是边跟踪边检测光强,直到四象限检测到的值在规定的区域。
在本发明中,所述太阳光强传感器采用带垂直隔板的四象限光电传感器,光敏电阻正对太阳,输出电压值最小(详见附图4),由于隔离板的存在,四象限检测值不一样,通过CPU对检测信号先进行A/D转换,再进行数字比较,分析和判断光的强度和方向,具体方法如下:
水平方向传感器左右测量值之差(D
垂直方向传感器上下测量值之差(D
在本发明中,所述时间控制原则是指,按太阳子午线(如图6所示)运行规律,CPU自动调节装置一年“春、夏、秋、冬”运行时间及一天内的跟踪频率。如夏天,装置从早上7点半开始跟踪,下午7点结束跟踪。冬天,装置从早上9点开始跟踪,下午5点结束跟踪。在一天内,上午和下午跟踪频率低,中午跟踪频率高。在具体跟踪过程中,按当关检测到地光强差进行跟踪。将时间控制原则和光强度控制原则有机结合,实现高水平、高效率的太阳光智能跟踪。
图5是本发明实施例提供的太阳太跟踪系统工作流程图。
本发明提供的太阳光自跟踪装置的二自由度旋转执行机构可根据需要选择一个自由度还是两个自由度。在硬件上,采用了模块化设计,针对不同需要可以自由搭配,在软件上,可以根据用户需要进行定制。
案例2:自跟踪太阳能路灯:
如图7所示,是本发明应用在太阳路灯实例。图7中,1、四象限光检测传感器;5、光伏极板;6、垂直方面旋转支架;7、垂直旋转轴;4-2、控制垂直方向运动的舵机;8、水平旋转轴;4-3、控制水平方向运动的舵机;9、安装板。
光伏极板安装在具有水平和垂直旋转的二自由度支架上,四象限光检测传感器用胶粘贴在极板上。太阳极板发电一方面供储电池充电,另一方面经稳压后给路灯LAP供电,当极板发电不足时,储电池补充供电。
按时间原则,系统自动开机(若春季工作时间定为早上8点到晚上6点,则早8点系统自动开启)。开机后,系统在程序控制下,先对四象限光检测传感器的信号进行A/D转换,然后计算水平方面的差值(D
案例3:自跟踪太阳能发电厂
图8是本发明实施例提供的自跟踪太阳能发电厂示意图。图8中,1、四象限光检测传感器;4-2、控制垂直方向运动的舵机;5、光伏极板;7、垂直旋转轴。
太阳能发电厂由几十块太阳能极板,通过并联方式,为系统提供能源。太多阳能发电经过稳压后逆变供用户使用。示例中列举了三块极板,每个极板配有一个垂直方面的旋转装置,系统共用一个四象限传感器。自跟踪太阳能发电厂只需要在垂直方跟踪太阳。对每个旋转装置而言,只有需要工作时,才给予供电。
按时间原则,系统每天自动开启和关闭跟踪系统。系统工作时,四象限光传感器检则的输出信号先经信号处理器进行处理,从处理器输出的信号送控制器,控制器在CPU的控制下对信号进行A/D转换,然后对转换的数字进行分析和判断。如果需要调整,系统发垂直舵机发出旋转指令(包括方向和角度)。系统根据时间原则,每隔一定时间,对数据进行采集和分析一次,对系统进行调整。
以上所述,仅为本发明的提供了两个具体实施方案,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
- 一种太阳光自跟踪装置
- 一种基于美学用自跟踪型音乐律动展示装置