对往返电梯组的控制
文献发布时间:2023-06-19 11:34:14
技术领域
本文中公开的主题大体上涉及电梯系统的领域,且特别地涉及用于操作往返电梯组的方法和设备。
背景技术
往返电梯组可包括用来使人在厅(例如,底层)与空中厅(例如,了望台)之间往返的一个或多个电梯系统。
发明内容
根据实施例,提供一种操作往返电梯组的方法。方法包括:检测在层站处电梯轿厢的到达;确定自前一电梯轿厢离开层站起的时间;确定电梯轿厢的满度(fullness)百分比;确定直到下一电梯轿厢到达层站处的估计时间;以及基于电梯轿厢的满度百分比、自前一电梯轿厢离开层站起的时间以及直到下一电梯轿厢到达层站处的估计时间中的至少一个来确定电梯轿厢何时离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:检测电梯轿厢内的乘客数量,其中响应于电梯轿厢内的乘客数量来确定电梯轿厢的满度百分比。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:当电梯轿厢的满度百分比大于所选择的满度百分比时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:当自前一电梯轿厢离开层站起的时间大于所选择的时间段时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:当直到下一电梯轿厢到达层站处的估计时间小于所选择的时间段时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:当电梯轿厢的满度百分比大于所选择的满度百分比时,命令电梯轿厢离开层站;当自前一电梯轿厢离开层站起的时间大于所选择的时间段时,命令电梯轿厢离开层站;以及当直到下一电梯轿厢到达层站处的估计时间小于所选择的时间段时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:获得在层站处两个或更多个电梯系统在电梯厅内的物理位置的布局,两个或更多个电梯系统中的每个包括电梯轿厢;以及响应于两个或更多个电梯系统在电梯厅内的物理位置来协调在层站处两个或更多个电梯系统中的每个的电梯轿厢的到达,其中两个或更多个电梯系统以在电梯厅内的布置来组织。
根据另一实施例,提供一种操作往返电梯组的方法。方法包括:获得在层站处两个或更多个电梯系统在电梯厅内的物理位置的布局,两个或更多个电梯系统中的每个包括电梯轿厢;以及响应于两个或更多个电梯系统在电梯厅内的物理位置来协调在层站处两个或更多个电梯系统中的每个的电梯轿厢的到达,其中两个或更多个电梯系统以在电梯厅内的布置来组织。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:协调两个或更多个电梯系统中的每个的电梯轿厢的到达,使得电梯轿厢从两个或更多个电梯系统中的每个以围绕布置的顺时针顺序到达。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:协调两个或更多个电梯系统中的每个的电梯轿厢的到达,使得电梯轿厢从两个或更多个电梯系统中的每个以围绕布置的逆时针顺序到达。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:将两个或更多个电梯系统在电梯厅内组织为第一组和第二组。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括:停用第一组,使得组织成第一组的两个或更多个电梯系统不再呼叫到层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可为:第一组位于电梯厅的第一侧上,且第二组位于电梯厅的第二侧上。
根据另一实施例,提供一种体现在非暂时性计算机可读介质上的计算机程序产品。该计算机程序产品包括指令,该指令在由处理器执行时促使处理器执行操作,该操作包括:检测在层站处电梯轿厢的到达;确定自前一电梯轿厢离开层站起的时间;响应于电梯轿厢内的乘客数量来确定电梯轿厢的满度百分比;确定直到下一电梯轿厢到达层站处的估计时间;以及基于电梯轿厢的满度百分比、自前一电梯轿厢离开层站起的时间以及直到下一电梯轿厢到达层站处的估计时间中的至少一个来确定电梯轿厢何时离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括,操作还包括:检测电梯轿厢内的乘客数量,其中响应于电梯轿厢内的乘客数量来确定电梯轿厢的满度百分比。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括,操作还包括:当电梯轿厢的满度百分比大于所选择的满度百分比时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括,操作还包括:当自前一电梯轿厢离开层站起的时间大于所选择的时间段时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括,操作还包括:当直到下一电梯轿厢到达层站处的估计时间小于所选择的时间段时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括,操作还包括:当电梯轿厢的满度百分比大于所选择的满度百分比时,命令电梯轿厢离开层站;当自前一电梯轿厢离开层站起的时间大于所选择的时间段时,命令电梯轿厢离开层站;以及当直到下一电梯轿厢到达层站处的估计时间小于所选择的时间段时,命令电梯轿厢离开层站。
除了本文中描述的特征中的一个或多个外,或作为备选,另外的实施例可包括,操作还包括:获得在层站处两个或更多个电梯系统在电梯厅内的物理位置的布局,两个或更多个电梯系统中的每个包括电梯轿厢;以及响应于两个或更多个电梯系统在电梯厅内的物理位置来协调在层站处两个或更多个电梯系统中的每个的电梯轿厢的到达,其中两个或更多个电梯系统以在电梯厅内的布置来组织。
本公开内容的实施例的技术效果包括操作往返电梯组以通过监测电梯轿厢的满度百分比和在层站处花费的时间两者来减轻群聚(bunch)。
除非另外明确地指示,前述特征和要素可在无排他性的情况下以各种组合来组合。根据以下描述和附图,这些特征和要素以及其操作将变得更明显。然而,应理解的是,以下描述和图在性质上意在为说明性和解释性的且非限制性的。
附图说明
本公开内容通过示例示出,且不限于附图,附图中相似的参考标号指示类似的要素。
图1是可采用本公开内容的各种实施例的电梯系统的示意性图示;
图2示出根据本公开内容的实施例的展示群聚的往返电梯组的时间对层站操作的图;
图3示出根据本公开内容的实施例的未展示群聚的往返电梯组的时间对层站操作的图;以及
图4示出根据本公开内容的实施例的用于与图1的电梯系统使用的建筑物电梯系统的示意图;
图5是根据本公开内容的实施例的操作往返电梯组的方法的流程图;
图6示出根据本公开内容的实施例的可提示电梯轿厢从层站释放的不同情景602、604;
图7是根据本公开内容的实施例的操作往返电梯组的方法的流程图;
图8示出未协调的系统,其中未协调在层站处多个电梯系统的电梯轿厢的到达;
图9示出根据本公开内容的实施例的协调系统,其中协调在层站处多个电梯系统的电梯轿厢的到达;以及
图10示出根据本公开内容的实施例的协调系统的显示装置,其中协调在层站处多个电梯系统的电梯轿厢的到达且下一电梯轿厢显示在显示装置上。
具体实施方式
图1是电梯系统101的透视图,该电梯系统101包括电梯轿厢103、对重105、张力部件107、导轨109、机器111、位置参考系统113和控制器115。电梯轿厢103和对重105由张力部件107连接到彼此。张力部件107可包括或构造为例如绳、钢缆和/或有涂层的钢带。对重105构造成平衡电梯轿厢103的负载,且构造成便于电梯轿厢103在电梯竖井117内并沿导轨109相对于对重105同时且在相反方向上移动。
张力部件107接合机器111,该机器111是电梯系统101的顶上结构的部分。机器111配置成控制电梯轿厢103与对重105之间的移动。位置参考系统113可安装在电梯竖井117的顶部处的固定部分上,诸如在支承件或导轨上,且可配置成提供与电梯轿厢103在电梯竖井117内的位置相关的位置信号。在其它实施例中,位置参考系统113可直接地安装到机器111的移动部分,或可位于如本领域中已知的其它位置和/或构造中。如本领域中已知的,位置参考系统113可为用于监测电梯轿厢和/或对重的位置的任何装置或机构。如将由本领域技术人员所了解的,例如而不限于,位置参考系统113可为编码器、传感器或其它系统,且可包括速度感测、绝对位置感测等。
如示出的,控制器115位于电梯竖井117的控制器室121中,且配置成控制电梯系统101(且特别是电梯轿厢103)的操作。例如,控制器115可向机器111提供驱动信号来控制电梯轿厢103的加速、减速、匀速(leveling)、停止等。控制器115还可配置成从位置参考系统113或任何其它期望的位置参考装置接收位置信号。当电梯轿厢103沿导轨109在电梯竖井117内向上或向下移动时,电梯轿厢103可在由控制器115控制下停止在一个或多个层站125处。虽然示出在控制器室121中,本领域技术人员将了解,控制器115可位于和/或构造在电梯系统101内的其它地点或位置中。在一个实施例中,控制器可位于远程或云中。
机器111可包括马达或类似的驱动机构。根据本公开内容的实施例,机器111构造成包括电气驱动的马达。用于马达的功率供应部可为任何功率源,包括功率网,其与其它部分组合向马达供应。机器111可包括牵引轮,该牵引轮将力传给张力部件107以使电梯轿厢103在电梯竖井117内移动。
虽然示出和描述有包括张力部件107的绕绳(roping)系统,采用使电梯轿厢在电梯竖井内移动的其它方法和机构的电梯系统可采用本公开内容的实施例。例如,实施例可在使用线性马达将运动传给电梯轿厢的无绳电梯系统中采用。实施例还可在使用液压提升机将运动传给电梯轿厢的无绳电梯系统中采用。图1仅为出于说明性和解释性的目的所提出的非限制性示例。
在其它实施例中,系统包括使乘客在楼层之间和/或沿单个楼层移动的输送系统。此类输送系统可包括自动扶梯、人员移动器等。因此,本文中描述的实施例不限于电梯系统,诸如图1中示出的电梯系统。在一个示例中,本文中公开的实施例可为适用的输送系统,诸如电梯系统101,以及输送系统的输送设备,诸如电梯系统101的电梯轿厢103。在另一示例中,本文中公开的实施例可为适用的输送系统,诸如自动扶梯系统,以及输送系统的输送设备,诸如自动扶梯系统的移动阶梯。
现在参照图2和图3(继续参照图1),其两者示出包括多个电梯轿厢103a-103g的往返电梯组112的时间211对层站125操作的图200a、200b。多个电梯轿厢103a-103g中的每个使人员(即,乘客)在初级层站125a与次级层站125b之间往返。初级层站125a可为底层或空中厅,其中乘客可登上多个电梯轿厢103a-103g中的一个以运送至次级层站125b。次级层站125b可为空中厅,其中乘客转移到另一电梯轿厢103,或次级层站125可为了望台。多个电梯轿厢103a-103g包括第一电梯轿厢103a、第二电梯轿厢103b、第三电梯轿厢103c、第四电梯轿厢103d、第五电梯轿厢103e、第六电梯轿厢103f和第七电梯轿厢103g。要理解的是,虽然图2和图3中公开的多个电梯轿厢103a-103g包括七个电梯轿厢103,本文中公开的实施例可适用于包括两个或更多个电梯轿厢103的任何往返电梯组。
当前,典型地在所有类型的往返电梯组中使用相同的调度算法,无论往返电梯组是标准的“本地服务”电梯组(例如,服务许多层站125)还是服务两个层站125的往返电梯组112(如图2和图3中示出的)。图2示出为往返电梯组112所独有的问题,其称为群聚。当电梯轿厢103“群聚起来”且开始成群250合拍地(in time)一起接近地行进时,发生群聚。对于群聚,可存在众多原因,一个原因可包括:一个电梯轿厢为装满乘客在层站125处等待过久,其然后可使随后的电梯轿厢积聚。一旦群250开始形成,它们趋于合拍地向前传播。图2中示出的群250由第五电梯轿厢103e、第四电梯轿厢103d、第二电梯轿厢103b、第七电梯轿厢103g和第六电梯轿厢103f构成。
群聚可导致若干电梯轿厢103一起非常接近地或几乎同时到达至层站125,其可导致对于正好在群250离开之后到达要登上电梯轿厢的乘客久的等待时间。有利地,通过实施所服务层站125的可预测模式和应用最佳控制方法(诸如,例如,如本文中描述的最佳停止规则),存在相当大的机会来改进往返电梯组112的性能和防止群聚。如图3中示出的,本文中公开的实施例寻求通过动态地控制在初级层站125a(或次级层站125b)处连续电梯轿厢103到达之间的“间隔”来生成连续电梯轿厢103到达之间的一致时间间隔以减小对于往返电梯组112中的电梯轿厢103的平均等待时间。这可通过减小和/或消除“群聚”来将平均等待时间减小远超过50%。另外,这还可减小离开的时间和至目的地的时间。
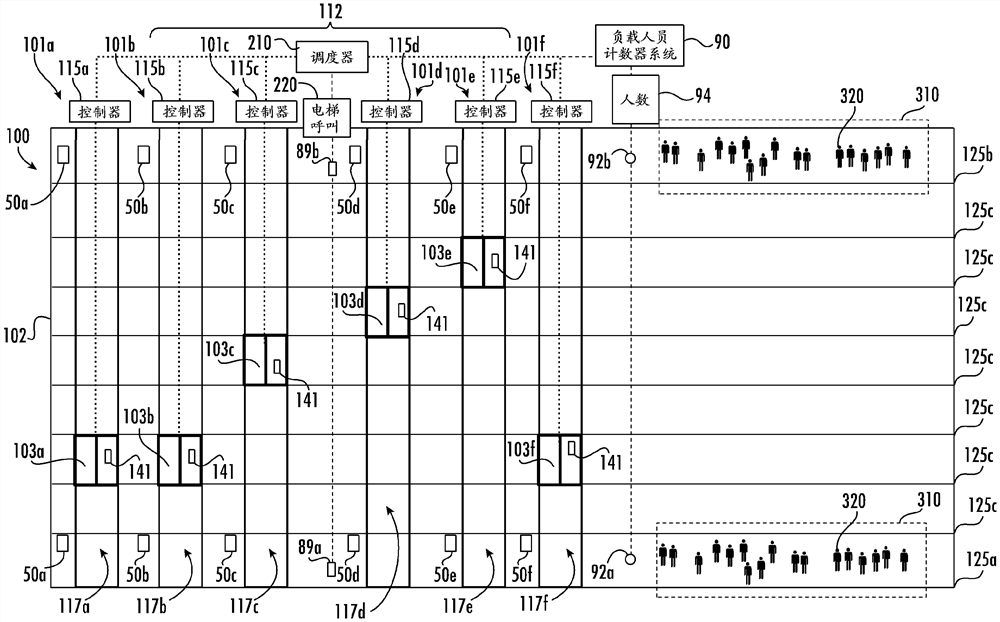
现在参照图4(继续参照图1-3)。去除了第七电梯轿厢103g以简化图4中的图示。如在图2中看到的,建筑物102内的建筑物电梯系统100可包括组织成往返电梯组112(例如,电梯组合)的多个不同的单独电梯系统101a-101f。电梯系统101a-101f包括具有电梯轿厢103a的第一电梯系统101a、具有电梯轿厢103b的第二电梯系统101b、具有电梯轿厢103c的第三电梯系统101c、具有电梯轿厢103d的第四电梯系统101d、具有电梯轿厢103e的第五电梯系统101e,以及具有电梯轿厢103f的第六电梯系统101f。要理解的是,虽然六个电梯系统101a-101f用于示例性图示,本文中公开的实施例可应用于具有两个或更多个电梯系统101的建筑物电梯系统100。还要理解的是,虽然九个层站125用于示例性图示,本文中公开的实施例可应用于具有任何数量的层站125的建筑物电梯系统100。图4示出初级层站125a、次级层站125b以及在初级层站125a与次级层站125b之间的所有的中间层站125c。往返电梯组112的电梯轿厢103a-103f典型地不在中间层站125c处停止,而是在初级层站125a与次级层站125b之间运送乘客。要理解的是,虽然使用初级层站125a和次级层站125b,本文中公开的实施例还可适用于在初级层站125a与次级层站125b之间的层站125c处停止的电梯系统101。
此外,为了便于解释,图4中示出的电梯系统101a-101f组织为单个往返电梯组112,但要理解的是,电梯系统101a-101f可组织为一个或多个往返电梯组。往返电梯组112可包含一个或多个电梯系统101。
图4的建筑物102中的初级层站125a和次级层站125b可具有电梯呼叫装置89a、89b。电梯呼叫装置89a、89b将电梯呼叫220(包括电梯呼叫220的源)发送到调度器210。电梯呼叫装置89a、89b可包括目的地输入选项,其包括电梯呼叫220的目的地。电梯呼叫装置89a、89b可为按钮和/或触摸屏,且可手动或自动激活。例如,电梯呼叫220可由经由电梯呼叫装置89a、89b输入电梯呼叫220的个人来发送。电梯呼叫装置89a、89b还可通过语音识别或门厅中的乘客检测机构(诸如,例如重量感测装置、视觉识别装置、深度感测装置、雷达装置、激光检测装置和/或能够感测乘客存在的任何其它期望装置)来激活以发送电梯呼叫220。电梯呼叫装置89a、89b可通过自动电梯呼叫系统来激活以发送电梯呼叫220,当确定个人为了呼叫电梯朝电梯系统移动时或当个人计划激活电梯呼叫装置89a、89b时该自动电梯呼叫系统自动地发起电梯呼叫220。电梯呼叫装置89a、89b还可为配置成传送电梯呼叫220的移动装置。移动装置可为智能电话、智能手表、膝上型计算机或为本领域技术人员所已知的任何其它移动装置。要理解的是,本文中公开的实施例可适用于不使用电梯呼叫装置89a、89b的电梯系统101a-101f,且因此调度器210可基于计划而不是电梯呼叫220或如由层站人员计数器装置92a、92b所检测的在电梯厅310中的人员320的存在来调度电梯轿厢103a-103f。
控制器115a-115f可为组合的、本地的、远程的、云等。调度器210可为本地的、远程的、云等。调度器210与每个电梯系统101a-101f的控制器115a-115f通信。备选地,可存在控制器115为所有的电梯系统101a-101f所共有且控制所有的电梯系统101a-101f。调度器210可为‘组’软件,其配置成选择给电梯呼叫220分配的最佳电梯轿厢103。调度器210管理与往返电梯组112相关的电梯呼叫装置89a、89b。
调度器210配置成控制和协调多个电梯系统101a-101f的操作。调度器210可为电子控制器,其包括处理器和相关联的存储器,该存储器包括计算机可执行指令,该计算机可执行指令在由处理器执行时促使处理器执行各种操作。处理器可为但不限于很多种可能架构中的任一种的单处理器或多处理器系统,包括均匀或不均匀布置的现场可编程门阵列(FPGA)、中央处理单元(CPU)、专用集成电路(ASIC)、数字信号处理器(DSP)或图形处理单元(GPU)硬件。存储器可为但不限于随机存取存储器(RAM)、只读存储器(ROM)或者其它电子、光学、磁性或任何其它计算机可读介质。
调度器210与建筑物电梯系统100的电梯呼叫装置89a、89b中的每个通信。调度器210配置成接收从电梯呼叫装置89a、89b传送的每个电梯呼叫220。调度器210配置成管理从每个电梯呼叫装置89a、89b到来的电梯呼叫220,且命令一个或多个电梯系统101a-101f响应于电梯呼叫220。备选地,在不存在电梯呼叫装置89a、89b的情况下,调度器210配置成基于电梯轿厢103a-103f在层站处多久的计划和/或在电梯厅310内的人员320的检测而不是电梯呼叫220来调度电梯轿厢103a-103f。
每个电梯系统101a-101f可包括电梯轿厢人员计数器141,其配置成检测电梯轿厢103a-103f内的乘客(即,人员)的数量。电梯轿厢人员计数器141与调度器210和/或控制器115a-115f通信。乘客数量允许调度器210确定在电梯轿厢103a-103f中留有多少空间。电梯轿厢人员计数器141可使用多种感测机构,诸如,例如视觉检测装置、重量检测装置、激光检测装置、门反向监测装置、热图像检测装置以及深度检测装置。视觉检测装置可为相机,其使用视觉识别来识别电梯轿厢103a-103f中的各个乘客和物体。重量检测装置可为感测电梯轿厢103a-103f中的重量且然后确定乘客数量的量表。激光检测装置可检测有多少乘客走过激光束来确定电梯轿厢103a-103f中的乘客数量。类似地,门反向监测装置还检测进入轿厢的乘客以便不将电梯门关到乘客上,且因此可用来确定乘客数量。热检测装置可为红外或其它热量感测相机,其使用检测到的温度来识别电梯轿厢103a-103f中的各个乘客和物体且然后确定乘客数量。深度检测装置可为2-D、3-D或其它深度/距离检测相机,其使用检测到的与物体和/或乘客的距离来确定乘客数量。如可由本领域技术人员所了解的,除了所陈述的方法外,可存在额外的方法来感测乘客数量,且可使用这些方法中的一种或任何组合来确定电梯轿厢103a-103f中的乘客数量。电梯轿厢人员计数器141还可能够检测可占有电梯轿厢103a-103f中的空间的行李或其它物体,且将此类物体与人员区分开。
有利地,为了避免图2中示出的群聚250,调度器210配置成基于下者中的至少一个来调度电梯轿厢103a-103f:电梯轿厢103a-103f的满度百分比(基于检测到的乘客数量)、自前一从层站125离开的电梯轿厢103离开起有多少时间,以及直到下一电梯轿厢103到达层站125处有多少时间。
层站人员计数器系统90配置成检测或确定人数94。人数94可为位于层站125a、125b上的人员320数量,或更特别为位于层站125a、125b上的电梯厅310中的人员320数量。人数94可为准确的人员320数量或大致的人员320数量。图2的建筑物102中的初级层站125a和次级层站125b可包括层站人员计数器装置92a、92b。层站人员计数器装置92a、92b可位于初级层站125a和次级层站125b上电梯组112附近。层站人员计数器装置92a、92b可包括相机。层站人员计数器装置92a、92b可用来确定在电梯系统101附近和/或在电梯系统101附近的电梯厅310内的人数94。电梯厅310可位于初级层站125a或次级层站125b上。人数94可包括位于电梯厅310中的人员320数量。位于电梯系统101附近和/或位于电梯厅310内的人员320指示人员320想要登上电梯系统101的电梯轿厢103来撤出建筑物102。
层站人员计数器装置92a、92b可包括在电梯厅310中的一个或多个检测机构,诸如,例如重量感测装置、视觉识别装置、深度感测装置、雷达装置、激光检测装置、移动装置(例如,移动电话)追踪和/或能够感测人员320存在的任何其它期望装置。视觉识别装置可为相机,其使用视觉识别来识别电梯厅310中的各个人员320和物体。重量检测装置可为感测电梯厅310中的重量且然后确定人员320数量的量表。激光检测装置可检测有多少乘客走过激光束来确定电梯厅310中的人员310数量。热检测装置可为红外或其它热量感测相机,其使用检测到的温度来识别电梯厅310中的各个人员320和物体且然后确定人员320数量。深度检测装置可为2-D、3-D或其它深度/距离检测相机,其使用检测到的与物体和/或人员320的距离来确定乘客数量。移动装置追踪可通过追踪移动装置无线信号和/或检测在建筑物102内在层站125上或电梯厅310中有多少移动装置在移动装置上使用特定的应用以确定层站125上或电梯厅310中的人员数量。如可由本领域技术人员所了解的,除了所陈述的方法外,可存在额外的方法来感测人员320数量,且可使用这些方法中的一种或任何组合来确定电梯厅310中或层站125上的人员320数量。
在一个实施例中,层站人员计数器装置92a、92b能够通过图像像素计数来检测人数94。人数94可将电梯厅310的当前图像与电梯厅310的储存图像比较。例如,通过捕捉电梯厅310的当前图像且将电梯厅310的当前图像与电梯厅310的储存图像(其示出电梯厅310有零个人员320存在或已知数量的人员320存在)比较,层站人员计数器装置92a、92b可使用像素计数。电梯厅310的储存图像与电梯厅310的当前图像之间不同像素的数量可与电梯厅310内的人数94相关。要理解的是,本文中公开的实施例不限于像素计数来确定人数94,且因此可使用包括但不限于视频分析软件的其它方法来确定人数94。视频分析可从静止物体中识别人员300,且单独地对每个人员计数,以确定人员300的总数量。
可使用机器学习、深度学习和/或人工智能模块来确定人数94。人工智能模块可位于层站人员计数器装置92a、92b中,或位于电梯厅310中或层站125上的单独模块中。单独模块可能够与层站人员计数器装置92a、92b通信。人数94可备选地表示为从百分之零至百分之一百的百分比,其指示在电梯厅310的储存图像与电梯厅310的当前图像之间有多少百分比的像素是不同的。电梯厅310的人数94可表示为一至十的标度(例如,一为空,且十为满),指示在电梯厅310的储存图像与电梯厅310的当前图像之间有多少百分比的像素是不同的。人数94可表示为实际的或估计的人员320数量,其可响应于电梯厅310的储存图像与电梯厅310的当前图像之间不同像素的数量来确定。
有利地,层站人员计数器系统90可用来代替电梯呼叫装置89a、89b。因此,当人数94等于或大于所选择的人数时,电梯呼叫220可传送到调度器。
另外,显示装置50a-50f可位于每个电梯系统101a-101f附近初级层站125a和次级层站125b上。如图4中示出的,每个电梯系统101a-101f可在初级层站125a和次级层站125b中的每个上具有它自己的显示装置50a-50f。备选地,可存在用于初级层站125a的单个显示装置50和用于次级层站125b的单个显示装置(见图10)。显示装置50a-50f视觉地显示,对于与显示装置50a-50f相关联的电梯系统101a-101f,电梯轿厢103是否将到达。有利地,这将允许人员320知道哪个电梯系统101a-101f具有接着到达层站125a、125b处的电梯轿厢103a-103f。有利地,显示装置50将允许在电梯厅310中等待的人员320知道哪些电梯轿厢103a-103f将不久到达,且因此人员320可聚在正确的电梯系统101a-101f周围,因此减小登上电梯的时间。
现在参照图5和图6,同时参照图1-4的部分。图5示出根据本公开内容的实施例的操作往返电梯组112的方法400的流程图。在实施例中,方法400可由图2的调度器210执行。在框404处,检测在层站125处电梯轿厢103的到达。在框406处,确定自前一电梯轿厢103离开层站125起的时间。在框410处,确定电梯轿厢103的满度百分比680。满度百分比680的确定可基于检测到的在电梯轿厢103内的乘客(即,人员320)的数量或基于其任何其它类似物,诸如,例如检测轿厢中的占用空间、轿厢中的重量,或为本领域技术人员所已知的任何其它类似方法。在框412处,确定直到下一电梯轿厢103到达层站125处的估计时间。在框414处,基于电梯轿厢103的满度百分比680、自前一电梯轿厢103离开层站125起的时间以及直到下一电梯轿厢103到达层站125处的估计时间中的至少一个来确定电梯轿厢103何时离开层站125。
图6示出可提示电梯轿厢103从层站125释放的不同情景602、604。如图6中情景602处示出的,当多个乘客320进入电梯轿厢103且电梯轿厢103的满度百分比680大于所选择的满度百分比640时,可命令电梯轿厢103离开层站125。因此,方法400还可包括:当电梯轿厢103的满度百分比680大于所选择的满度百分比640时,命令电梯轿厢103离开层站125。例如,如图6中示出的,所选择的满度百分比640可为80%。要理解的是,所选择的满度百分比40也可大于或小于80%。如图6中情景604处示出的,当自前一电梯轿厢103离开层站125起的时间大于所选择的时间段660时,可命令电梯轿厢103离开层站125。例如,所选择的时间段60可为30秒。要理解的是,所选择的时间段60可大于或小于30秒。方法400还可包括:当自前一电梯轿厢103离开层站125起的时间大于所选择的时间段660时,命令电梯轿厢103离开层站125。另外,方法400还尚可包括:当直到下一电梯轿厢103到达层站125处的估计时间小于所选择的时间段时,命令电梯轿厢103离开层站125。例如,该所选择的时间段可等于一分钟。要理解的是,所选择的时间段60可大于或小于一分钟。
虽然上文描述以特定的顺序描述了图5的流程,应了解的是,除非在所附权利要求书中另外特别地需要,步骤的排序可变化。
现在参照图7、图8、图9和图10,同时参照图1-4的部分。图7示出根据本公开内容的实施例的操作往返电梯组112的方法700的流程图。在实施例中,方法700可由图2的调度器210执行。在框704处,获得在层站125处两个或更多个电梯系统101在电梯厅310内的物理位置的布局。两个或更多个电梯系统101中的每个包括电梯轿厢103。在框706处,响应于两个或更多个电梯系统在电梯厅310内的物理位置来协调在层站125处两个或更多个电梯系统101中的每个的电梯轿厢103的到达。两个或更多个电梯系统101以在电梯厅310内的布置来组织。在实施例中,两个或更多个电梯系统101可以以方形布置、矩形布置、三角形布置、圆形布置或电梯厅310内的任何其它布置来组织。图8和图9中示出的布置是矩形的。图8示出未协调的系统,其中未协调在层站125处两个或更多个电梯系统101中的每个的电梯轿厢103的到达,其使乘客去猜测关于哪个电梯轿厢103将接着到达。图8中的箭头800指示每个电梯系统101的电梯轿厢103的到达顺序。在图8中示出的示例中,来自每个电梯系统101的电梯轿厢103的到达顺序可如下:第一电梯系统101a,然后第二电梯系统101b,然后第三电梯系统101c,然后第四电梯系统101d,然后第五电梯系统101e,以及然后第六电梯系统101f。图9示出协调的系统,其中协调在层站125处两个或更多个电梯系统101中的每个的电梯轿厢103的到达,其使乘客有信心知道哪个电梯轿厢103将接着到达。图9中的箭头900指示每个电梯系统101的电梯轿厢103的到达顺序。
在实施例中,可协调两个或更多个电梯系统101中的每个的电梯轿厢103的到达,使得电梯轿厢103从两个或更多个电梯系统101中的每个以围绕布置的顺时针顺序到达,如图9中示出的。电梯厅310可包括一个或多个显示装置50,其显示协调电梯系统101的电梯轿厢到达的方向。例如,如图10中示出的,协调两个或更多个电梯系统101中的每个的电梯轿厢103的到达,使得电梯轿厢103从两个或更多个电梯系统101中的每个以顺时针顺序到达,因此显示装置50示出电梯轿厢103到达的顺时针方向。在另一实施例中,可协调两个或更多个电梯系统101中的每个的电梯轿厢103的到达,使得电梯轿厢103从两个或更多个电梯系统101中的每个以围绕布置的逆时针顺序到达。
在实施例中,两个或更多个电梯系统101可在电梯厅310内组织为第一组610和第二组620。第一组610可沿电梯厅310的第一壁612驻留,且第二组620可沿电梯厅310的第二壁614驻留。可停用第一组610或第二组620来为乘客简化登梯,故他们仅必须看一组。例如,可停用第一组610,使得组织成第一组610的两个或更多个电梯系统不再呼叫到层站125。例如,第一电梯组610可在低活动性时段期间停用。
备选地,第一组610a和第二组620a可横跨电梯厅310分离,如图9中示出的(即,从第一壁612穿过厅310延伸到第二壁614的分隔线)。可停用第一组610a或第二组620a来为乘客简化登梯。例如,可停用第一组610a,使得组织成第一组的两个或更多个电梯系统不再呼叫到层站。
虽然上文描述以特定的顺序描述了图7的流程,应了解的是,除非在所附权利要求书中另外特别地需要,步骤的排序可变化。
如上文描述的,实施例可呈处理器实施的过程以及用于实践那些过程的装置(诸如处理器)的形式。实施例还可呈包含体现在有形介质(诸如网络云存储、SD卡、闪存驱动器、软盘、CD ROM、硬盘驱动器或任何其它计算机可读存储介质)中的指令的计算机程序代码(例如,计算机程序产品)的形式,其中,当计算机程序代码加载到计算机中且由计算机执行时,计算机变为用于实践实施例的装置。实施例还可呈例如无论是存储在存储介质中、加载到计算机中且/或由计算机执行,还是在某种传送介质上传送、加载到计算机中且/或由计算机执行或者在某种传送介质上(诸如在电线或电缆上、通过光纤或经由电磁辐射)传送的计算机程序代码的形式,其中,当计算机程序代码加载到计算机中且由计算机执行时,计算机变为用于实践实施例的装置。当在通用微处理器上实施时,计算机程序代码段将微处理器配置成产生特定的逻辑电路。
用语“约”意在包括基于在提交申请的时候可用的设备与特定量的测量和/或制造公差相关联的误差度。
本文中使用的术语仅出于描述特定实施例的目的,且不意在限制本公开内容。如本文中使用的,除非上下文另外清楚地指示,单数形式“一”、“一个”和“该”意在也包括复数形式。还将理解的是,用语“包括(comprises)”和/或“包括了(comprising)”在用于该说明书中时指定所陈述的特征、整数、步骤、操作、要素和/或部分的存在,但不排除一个或多个其它特征、整数、步骤、操作、要素部分和/或其组的存在或添加。
本领域技术人员将了解,本文中示出和描述各种示例性实施例,在特定实施例中各自具有某些特征,但本公开内容不因此受限。相反地,可修改本公开内容以结合此前未描述但与本公开内容的范围相称的任何数量的变型、变更、替换、组合、子组合或等同布置。另外,虽然描述了本公开内容的各种实施例,要理解的是,本公开内容的方面可仅包括所描述的实施例中的一些。因此,本公开内容不看作由前述描述所限制,而是仅由所附权利要求书的范围所限制。
- 对往返电梯组的控制
- 电梯组管理控制装置以及电梯组管理控制方法