一种集材机器人
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及林业机械技术领域,特别涉及一种集材机器人。
背景技术
在木材采伐过程中,需要将被采伐木材在山上集中后统一运输。而以往的搬运方式通常依靠牛马将木材拖运至较为平缓坡地的山地集中转运点,但随着社会的发展牛马牲畜已经退出劳动舞台了,现在只能依靠人工在山地去搬运被采伐的木材,由于山地没有路,人力搬运不但劳动强度大、效率低而且又非常危险。
发明内容
本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种集材机器人,能够机械化木材搬运工作,降低劳动强度,大幅降低木材采伐运输过程中对人工需求。
根据本发明的第一方面,提供一种集材机器人,包括车架;吊装机构,设置在所述车架上,用于吊装木材;固定机构,设置在所述车架上且位于所述吊装机构下方,用于固定木材;行走机构,设置在所述车架上,可带动车架移动;以及动力机构,设置在所述车架上并与所述行走机构连接,用于驱动所述行走机构。
有益效果:本集材机器人包括车架、吊装机构、固定机构、行走机构以及动力机构。吊装机构设置在车架上。固定机构设置在车架上且位于吊装机构的下方。行走机构设置在车架上。动力机构设置在车架上且与行走机构连接。吊装机构和固定机构配合可以快速地将木材的一端固定在车架上。动力机构可驱动行走机构带动车架搬运木材。实现了机械化木材搬运工作,降低劳动强度,大幅降低人工需求。
根据本发明所述的一种集材机器人,所述吊装机构包括:支撑架,设置在所述车架上;绳盘组件,设置在所述支撑架上;吊绳,一端绕设在所述绳盘组件上,另一端自由;以及吊钩,设置在所述吊绳的自由端上,用于挂接木材。
根据本发明所述的一种集材机器人,所述绳盘组件包括:机架,设置在所述支撑架上;卷筒,转动设置在所述机架上,所述吊绳的一端绕设在所述卷筒上,所述卷筒转动,可带动所述吊绳的自由端上升或下降;支点轮,可转动地设置在所述支撑架上,所述吊绳的自由端绕过所述支点轮向下垂落;以及动力装置,设置在所述机架上且与所述卷筒连接,用于提供动力。
根据本发明所述的一种集材机器人,所述绳盘组件还包括:电池仓,设置在所述支撑架上且位于所述机架的一侧;蓄电池,设置在所述电池仓中并与所述动力装置连接;以及无线控制模块,与所述蓄电池连接,所述无线控制模块与所述动力装置连接,所述无线控制模块可无线操控所述动力装置。
根据本发明所述的一种集材机器人,所述固定机构包括:第一铰接座,设置在所述车架上;第二铰接座,与所述第一铰接座铰接,所述第二铰接座上端设有平板;以及夹持组件,可转动地设置在所述平板上,用于固定木材。
根据本发明所述的一种集材机器人,所述夹持组件包括:夹持底板,可转动地设置在所述平板上;夹持板,设置在所述夹持底板上,所述夹持板上开设有凹槽,所述凹槽可容置木材;以及紧绳器,设置在所述夹持底板上,用于辅助锁紧固定木材。
根据本发明所述的一种集材机器人,所述凹槽的边缘呈锯齿状。
根据本发明所述的一种集材机器人,还包括无线及自主控制组件,所述无线及自主控制组件设置在所述车架上,所述无线及自主控制组件与所述动力机构连接,所述无线及自主控制组件可控制所述动力机构对所述行走机构的动力输出,进而操控所述行走机构。
根据本发明所述的一种集材机器人,还包括照明装置,所述照明装置设置在所述车架上且与所述无线及自主控制组件连接。
根据本发明所述的一种集材机器人,所述行走机构为履带组件。
附图说明
下面结合附图和实施例对本发明进一步地说明;
图1为本发明较佳实施例的结构示意图;
图2为本发明较佳实施例的正视图;
图3为本发明较佳实施例吊装机构的结构示意图;
图4为图3中A处的局部放大图;
图5为本发明较佳实施例吊装机构的正视图;
图6为本发明较佳实施例固定机构的结构示意图;
图7为本发明较佳实施例固定机构的正视图。
具体实施方式
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
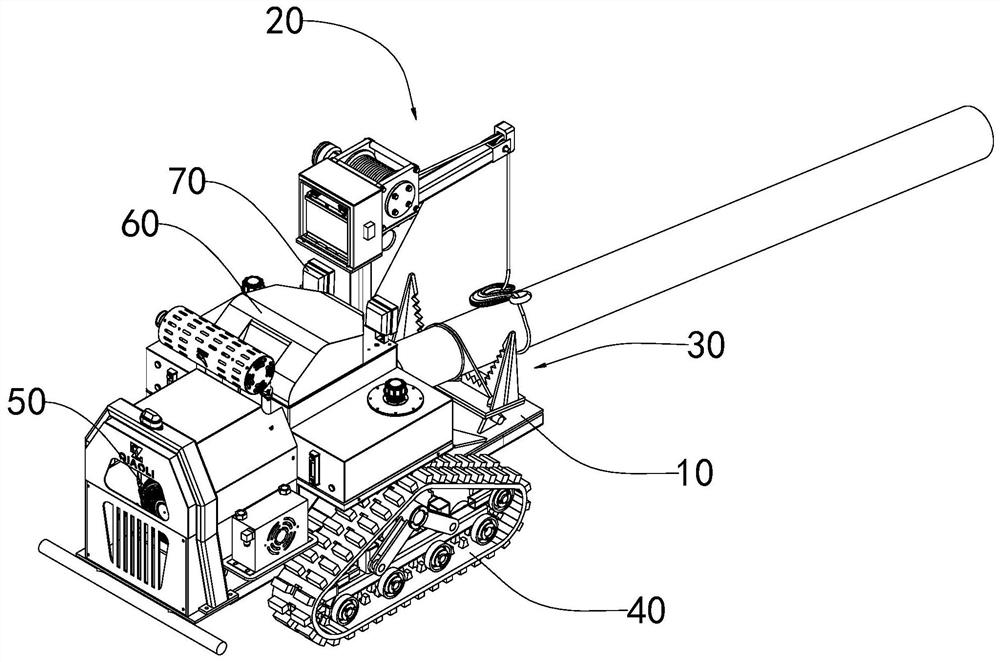
参照图1和图2,一种集材机器人包括车架10、吊装机构20、固定机构30、行走机构40以及动力机构50。吊装机构20设置在车架10上,用于吊装木材。固定机构30设置在车架10上且位于吊装机构20下方,用于固定木材。行走机构40设置在车架10上,可带动车架10移动。动力机构50设置在车架10上并与行走机构40连接,用于驱动行走机构40。
进一步地,参照图1和图2,本发明的一种集材机器人还包括无线及自主控制组件60。无线及自主控制组件60设置在车架10上。无线及自主控制组件60 与动力机构50连接。无线及自主控制组件60可控制动力机构50对行走机构40 的动力输出,进而操控行走机构40。
当然,值得说明的是,无线及自主控制组件60包括无线控制模式和自主控制模式,本集材机器人可以在无线控制模式和自主控制模式之间进自由行切换,无线控制模式下由工作人员手持远程控制端对集材机器人进行远程控制,适用于地形较为复杂的工作区域。自主控制模式由无线及自主控制组件60中的控制芯片按照设定的行为模式自动完成木材采伐运输过程,其过程完全自动化。自主控制模式适用于地形开阔,地形平坦的工作区域。在工作人员手持的无线操作端以及集材机器人上,还设置有紧急停止按钮,双层保险,防止意外发生。
无线操控和自主控制集材机器人搬运和收集木材是一种开创性的尝试,这种方式大幅降低了木材收集和搬运所需的人工耗费,并且,在复杂地形工作时,因为操作人员的视角可以自由调整,将机械设备操作的安全隐患大幅减少。
进一步地,参照图1和图2,还包括照明装置70。照明装置70设置在车架 10上且与无线及自主控制组件60连接。
进一步地,在本发明的一种实施例中,行走机构40为履带组件。履带式的行走机构40让本集材机器人能够适应多种地形在山地、丘陵等地形工作时最大的工作仰角能够达到40度。当然,值得说明的是,行走机构40为履带组件仅为本发明的一种实施方式,行走机构40也可以为通用的轮式行走机构,适用于地形平坦的工作地点,可以提升搬运速度。
参照图3,吊装机构20包括:支撑架21、绳盘组件22、吊绳23以及吊钩 24。支撑架21设置在车架10上。绳盘组件22设置在支撑架21上。吊绳23一端绕设在绳盘组件22上,另一端自由。吊钩24设置在吊绳23的自由端上,用于挂接木材。
进一步地,参照图3至图5,绳盘组件22包括:机架221、卷筒222、支点轮223以及动力装置224。机架221设置在支撑架21上。卷筒222转动设置在机架221上。吊绳23的一端绕设在卷筒222上。卷筒222转动可带动吊绳23 的自由端上升或下降。支点轮223可转动地设置在支撑架21上。吊绳23的自由端绕过支点轮223向下垂落。动力装置224设置在机架221上且与卷筒222连接,用于提供动力。
当然,值得说明的是,支点轮223上方还设有一个防脱绳装置,防脱绳装置设置在支撑架21上,防脱绳装置可以防止吊绳23因抖动脱离支点轮223。
参照图3至图5,绳盘组件22还包括:电池仓225以及蓄电池226以及无线控制模块227。电池仓225设置在支撑架21上且位于机架221的一侧。蓄电池226设置在电池仓225中并与动力装置224连接。无线控制模块227与蓄电池 226连接。无线控制模块227与动力装置224连接。无线控制模块227可无线操控动力装置224。
蓄电池226和无线控制模块227的加入使得工作人员能够远程遥控吊装机构 20,避免了工作人员在操作台和工作区来回跑的麻烦,提升了效率。亦或是减少了一个操作人员,仅需一个人就可以完成吊装工作,降低了人工费用。
参照图5至图7,固定机构30包括:第一铰接座31、第二铰接座32以及夹持组件33。第一铰接座31设置在车架10上。第二铰接座32与第一铰接座31 铰接。第二铰接座32上端设有平板321。夹持组件33可转动地设置在平板321 上,用于固定木材。
当然,值得说明的是,木材转运时,木材一端架设在夹持组件33上,另一端在地面拖行,此时木材与水平面形成一个倾角。第一铰接座31与第二铰接座 32铰接,使得夹持组件33可以绕着第一铰接座31与第二铰接座32的铰接点旋转。夹持组件33可以与上述倾角保持相同的倾斜,便于夹持的稳定性。同时,针对长度不一的木材,倾角也会不同。第一铰接座31与第二铰接座32铰接的方式可以适应不同长度木材产生的倾角。
当然,值得说明的是,夹持组件33可转动地设置在平板321上,在本实施例中,平板321中部设置有立轴,夹持组件33可以绕立轴转动,当车架10转弯时,在木材惯性的保持下,夹持组件33会与平板321发生相对转动,这样使得转弯时夹持组件33与平板321不至于蹩死,使得木材能够以一个较为平缓的方式转动,避免的因转运造成的木材损伤。
参照图6和图7,夹持组件33包括:夹持底板331、夹持板332以及紧绳器 333。夹持底板331可转动地设置在平板321上。夹持板332设置在夹持底板331 上。夹持板332上开设有凹槽332a。凹槽332a可容置木材。紧绳器333设置在夹持底板331上,用于辅助锁紧固定木材。
当然,值得说明是,在本发明的其他实施方式中,夹持组件33还可采用多种夹持方式,如采用液压元件推动位于夹持底板331两端的滑动板相对运动进行夹持。也可以采用伺服电机配合丝杆达到相同目的。
进一步地,凹槽332a的边缘呈锯齿状。当然,值得说明的是,锯齿状的边缘可以增大木材与所述凹槽332a边缘的摩擦力,防止在木材运输过程中,因颠簸造成木材松脱掉落。
当然,值得说明的是,在本实施例中,紧绳器333为紧绳环,使用绳子将木材的一端缠绕后将绳头固定在紧绳环即可完成木材的固定。而在本发明的一些其他实施例中,紧绳器333也可为棘轮盘,将绳子的一端从棘轮盘中抽出,缠绕在木材后转动棘轮盘收紧绳子,依靠棘轮盘的止逆效果将绳子锁紧。
本集材机器人在使用时,可由工作人员远程操控集材机器人运动至需要搬运的木材旁,然后由工作人员操控吊装机构20,下放吊绳23,使用吊钩24配合吊绳23将木材的一端捆绑。随后由工作人员操控吊装机构20,提升吊绳23,将木材的一端提升至固定机构30处。
随后,稍稍下放吊绳23,将木材的一端放入凹槽332a中并抵顶在凹槽332a 的边缘。随后使用钢丝绳或其他强度足够的绳索类物品将木材的一端缠绕绑紧,绑紧后将绳头固定在紧绳器333即可完成木材的固定。
随后工作人员可以操控集材机器人运动至木材集中处,解开木材一端的钢丝绳,随后使用吊装机构20将木材的一端缓缓放下,即可完成木材的收集和搬运过程。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种集材机器人
- 一种适于竹林间伐的移动式索道集材设备及集材方法