一种线激光旋转扫描三维轮廓测量方法及装置
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及三维轮廓测量技术领域,具体地说,是一种线激光旋转扫描三维轮廓测量方法及装置。
背景技术
传统的激光三角法测量系统中需将测量装置或待检物体置于平移滑轨上,控制物体与检测装置做相对运动以获取物体三维信息,该方法的问题有:(1)设备体积庞大,机械结构复杂,需要较大的运动空间;(2)滑轨在直线滑移过程中会引入较大的机械抖动误差;(3)移动装置不便捷导致测量速度慢。(4)实际应用中物体在一些情况下不能自由运动。
发明内容
针对现有技术的技术问题,本发明公开了一种一种线激光旋转扫描三维轮廓测量方法及装置,本发明是通过以下技术方案来实现的:
本发明公开了一种线激光旋转扫描三维轮廓测量方法,包括如下步骤:
1)相机标定和系统参数标定;
2)将物体放在基准平面上,相机置于基准面正上方,由步进电机控制线激光器转动,使得激光线能完整扫描物体轮廓;对比平移式的扫描通常由步进电机旋转带动皮带运动,旋转扫描的机械效率更高,使得系统整体扫描速度更快,稳定性更高。步进电机体积较小;
3)扫描并使用步进电机带动激光器旋转运动;
4)线激光器每转动相同角度获取一张二维图像;
5)根据获取的二维图像上线激光条纹中心的像素点坐标计算物体轮廓的高度信息。
作为进一步地改进,本发明所述的相机标定和系统参数标定的具体计算方法为:
4.1)对相机进行标定,计算出相机内参K,对基准面处进行标定计算出相机相对于基准面的外参矩阵R和T;
4.2)系统参数d、Δh、L的求解,目前很多方法并未提供系统参数的求解方法)。
作为进一步地改进,本发明所述的系统参数d、Δh、L的求解方法如下:
设d为O到基准面的垂直距离,设Δh为激光器与相机到基准面垂直距离之差,L为激光器与相机的水平距离;
设O点为镜头光心位置,设相机实际摆放时的相机坐标系为OX
有相机模型公式
由
再由几何关系得到:(d+Δh)tan(θ
已知d和Δh,由几何关系计算得到L=(d+Δh)tan(θ
作为进一步地改进,本发明所述的物体轮廓的高度信息的计算公式为:
由几何关系有(Z′
由
h即为物体表面轮廓的高度值。
作为进一步地改进,本发明所述的公式的计算方法为:
通过线激光逐角度扫描物体轮廓,并用相机同频率获取二维图像计算物体轮廓高度信息,再进行三维轮廓建模,线激光器激光发射点为B点,线激光以θ角入射至待测物体表面,光线经过物体表面漫反射由成像透镜成像于像面D点,改变θ角,获得物体不同位置轮廓的成像点,由步进电机带动线激光器逐角度扫描物体,确保激光线完整横扫描物体表面轮廓,并使激光旋转速度和相机拍摄频率保持一致,由相机采集激光条纹二维图像,对二维图像进行图像处理获取线条纹中心点像素坐标
作为进一步地改进,本发明所述的图像处理步骤包括图像降噪、ROI获取、激光条纹中心点提取等算法,图像处理用于获得二维图像中线激光条纹的一系列中心点位置。
作为进一步地改进,本发明所述的步骤5)后为,在采集完所有物体轮廓的二维图像和计算高度后,对物体轮廓进行三维重构。
本发明还公开了一种线激光旋转扫描三维轮廓测量装置,装置包括步进电机、固定在步进电机上的线激光器,线激光器在步进电机控制下完成物体轮廓的扫描,还包括基准平面以及位于基准平面正上方的相机。
作为进一步地改进,本发明所述的步进电机由脉冲控制其转动角度。
本发明的有益效果如下:
(1)设备体积较小,机械结构简单;
(2)使用线激光旋转方式扫描物体轮廓,系统的稳定性和测量速度高;
(3)无需物体运动,解决实际应用中物体在一些情况下不能自由运动的问题。
附图说明
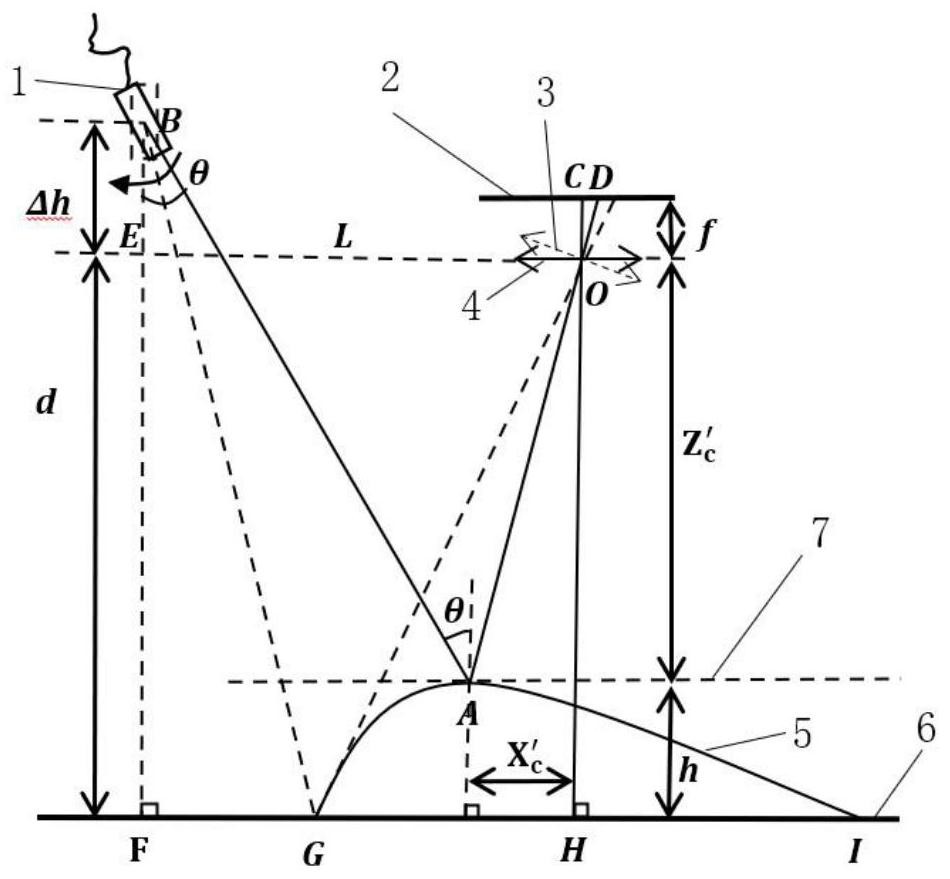
图1是本发明线激光扫描三维轮廓测量方法的原理示意图;
图2是相机坐标系OX
图3是系统参数d、Δh、L求解原理示意图;
图4是本发明实施流程图;
图5是使用本发明的方法的装置结构示意图;
图中:1、线激光器,2、成像平面,3、实际成像透镜,4、虚拟成像透镜,5、物体,6、基准平面,7、待测平面,8、相机,9、步进电机。
具体实施方式
本发明公开了一种线激光旋转扫描三维轮廓测量方法及装置,其特征在于,
1.将物体5放在基准平面6上,由步进电机9控制线激光器1转动,使得激光线能完整扫描物体5轮廓;
2.开始扫描并使用步进电机9带动线激光器1旋转运动;
3.线激光器1每转动相同角度获取一张二维图像
4.根据获取的二维图像上线激光条纹中心的像素点坐标计算物体5的高度轮廓。具体计算方法如下,本发明提供的高度h信息的计算方法最后得到的公式只包含一个可控的角度变量,其他均为已知的系数,现有的其他技术手段公式中会涉及较多需要进一步求解的参数变量:
默认相关研究人员对相机8标定,针孔相机8模型涉及的世界坐标系、相机8坐标系、图像坐标系和像素坐标系以及其四者之间的转换关系有所了解。由于不同相机8的畸变模型不同,因此此方法提供的计算公式未考虑畸变,假设相机8为无畸变的理想相机8。若工程中使用的相机8有较大畸变需要在计算中进行考虑。
相机8标定和系统参数标定:
a.对相机8进行标定,计算出相机8内参K,对基准平面6处进行标定计算出相机8相对于基准平面6的外参矩阵R和T,R为3x3矩阵,T为3x1矩阵。
b.系统参数d、Δh、L的求解:
设相机8实际摆放时的相机8坐标系为OX
硬件装置如图5所示,将线激光器1固定在步进电机9上,使得线激光器1在步进电机9控制下从左至右完成物体5轮廓的扫描;相机8放置于基准平面6正上方一定距离,使物体5表面轮廓在相机8中呈尽量完整的像。
方案的整体实施流程如图4所示,流程包括标定模块和测量模块。
其中,标定模块于测量模块之前运行,需要标定出相机8内外参数和系统参数用于测量模块的计算。标定相机8的内参K和相机8相对于基准平面6的外参R。计算系统参数d=R
其中,测量模块通过线激光逐角度扫描物体5轮廓,并用相机8同频率获取二维图像计算物体5轮廓高度信息,再进行三维轮廓建模;如图1所示,一字线激光器1激光发射点为B点,线激光以θ角入射至待测物体5表面于A点,经过A点与基准平面6平行的为待测平面7,两平面的距离为A点的高度信息h,光线经过物体5表面漫反射由实际成像透镜3成像于成像像面2于D点。改变θ角,可获得物体5不同位置轮廓的成像点。由步进电机9带动线激光器1逐角度扫描物体5,确保激光线完整横扫描物体5表面轮廓,并使激光旋转速度和相机8拍摄频率保持一致。由相机8采集激光条纹二维图像,对二维图像进行图像处理获取线条纹中心点像素坐标
上述的图像处理步骤包括图像降噪、ROI获取、激光条纹中心点提取等算法步骤,图像处理目的在于获得二维图像中线激光条纹的一系列中心点位置。
具体的,步进电机9体积较小,由脉冲控制其转动角度,精度高,响应快,满足高测量效率和高精度的需求,使系统有更高的测量精度和效率。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种线激光旋转扫描三维轮廓测量方法及装置
- 一种线激光扫描三维轮廓测量方法及装置