中空回转环形岩石巷道掘进机
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及岩石巷道掘进设备领域,特别是涉及中空回转环形岩石巷道掘进机。
背景技术
现有岩石巷道掘进机主要有岩石型盾构机和反井钻机,其对工作面实施的是以碾压为主的全断面破坏。
岩石盾构机依靠外部机械对刀盘和机体进行整体推进,同时将刀具通过强大的压力压入岩石中,再通过强大的扭矩转动刀盘,从而在岩石工作面实施碾压和切削作业,其对岩石工作面进行大量碾压和少量切削方式的岩石破坏属于高能耗的破坏方式,特别是全断面掘进,要求动力高,机械强度高,同时盾构机机体庞大、功能齐全、造价高昂,不适合在矿山井下施工位置多变的小规格工作面中施工,同时不能施工天井、地井等工程。
反井钻机施工时,扩孔钻头固定在钻杆上,由位于天井上部的钻机实施向上的拉力和扭矩,以天井的中心孔为中心被动转动并碾压破坏岩石,全断面碾压破坏时,对动力和机具的强度要求同样很高。反井钻机的钻头也有碾压破坏和其它破坏的组合方式,但对工作面而言,依然时全断面掘进。反井钻机由于钻机自下向上的牵引方式,只能施工陡倾斜天井,不能施工平巷、斜井和地井等工程。
同时,采用上述全断面掘进机进行作业时,设备购置成本高、施工电力高,施工成本高,并且,掘进速度非常慢。
发明内容
为解决上述技术问题,本发明提供了中空回转环形岩石巷道掘进机,采用环形的刀盘和固定架的设计方式,刀盘在固定架上并通过多组的动力组进行驱动,动力组可提供刀盘回转的动力,还可提供整机前进或后退的动力,可适应全方位多角度的巷道钻进;整体结构简单,成本低,同时,可连续作业,掘进速度较快。
本发明解决其技术问题所采用的技术方案是:中空回转环形岩石巷道掘进机,包括环形本体;所述环形本体包括环形的固定架和安装在固定架上的环形的刀盘;所述刀盘的顶面安装有刀具组件;所述刀盘与固定架之间沿环形方向规则分布有多组动力组;所述动力组包括回转动力机构和轴向动力机构;所述回转动力机构用于驱动刀盘沿固定架作回转动作;所述轴向动力机构,用于驱动环形本体在岩石巷道中前进或后退;所述刀盘用于通过刀具组件在岩石巷道中形成环形钻槽。
进一步地,所述回转动力机构包括固定在刀盘的齿条、安装在固定架上的并与齿条配合的齿轮、以及用于驱动齿轮的第一驱动机构;所述第一驱动机构用于驱动齿轮转动,并带动齿条,使刀盘沿固定架回转移动。
进一步地,所述轴向动力机构为轮式轴向移动机构、步进式轴向移动机构中的一种或两种的组合。
进一步地,所述轮式轴向移动机构包括移动轮、移动轮驱动机构;所述移动轮的轮面与环形钻槽的侧壁接触;所述移动轮驱动机构用于驱动移动轮带动环形本体在环形钻槽的深度方向前进或后退。
进一步地,所述移动轮驱动机构与移动轮通过蜗轮蜗杆传动连接;所述轮式轴向移动机构还包括压紧机构;所述压紧机构用于为移动轮提供与环形钻槽的压力。
进一步地,所述步进式轴向移动机构包括径向支撑机构和轴向驱动机构;所述轴向驱动机构安装在固定架上,用于驱动径向支撑机构沿环形钻槽的深度方向前进或后退;所述径向支撑机构包括支撑端和支撑驱动机构;所述支撑端为两个,分别对应的与环形钻槽的外径内壁和内径内壁配合,所述支撑驱动机构用于驱动两个支撑端在环形钻槽的外径内壁和内径内壁之间撑紧或脱离。
进一步地,所述支撑端为与环形钻槽的外径内壁和内径内壁配合的支撑板,支撑端上还固定有与固定架径向方向一致的支撑杆,两个支撑杆之间设置有所述的支撑驱动机构;所述轴向驱动机构为两个,两个轴向驱动机构的驱动端分别与对应的支撑杆连接。
进一步地,所述刀盘与固定架之间还安装有第一支撑轴承;所述刀盘通过第一支撑轴承与固定架装配,所述第一支撑轴承用于减少刀盘回转时与固定架间的摩擦力,还用于刀盘与固定架的轴向限位和径向限位。
进一步地,所述刀盘与固定架之间设置有环形滑轨和环形滑块;所述环形滑轨和环形滑块分别安装在刀盘和固定架上,所述刀盘通过环形滑轨和环形滑块与固定架装配;所述环形滑轨和环形滑块用于为刀盘在固定架上回转提供导向,还用于刀盘与固定架的轴向限位;所述刀盘与固定架之间还设置有径向限位轮,用于刀盘与固定架的径向限位。
进一步地,所述刀盘包括外环刀盘和内环刀盘;所述外环刀盘的内侧壁上和内环刀盘的外侧壁上分别设置有齿条;两个齿条之间啮合同一齿轮;所述齿轮用于在旋转时带动外环刀盘和内环刀盘按相反的方向回转;所述外环刀盘和内环刀盘之间还设置有第二支撑轴承;所述外环刀盘通过第二支撑轴承与内环刀盘装配。
本发明的优点:本发明的中空回转环形岩石巷道掘进机,采用环形的刀盘和固定架的设计方式,刀盘在固定架上并通过多组的动力组进行驱动,动力组可提供刀盘回转的动力,还可提供整机前进或后退的动力,可适应全方位多角度的巷道钻进;整体结构简单,成本低,同时,可连续作业,掘进速度快。
附图说明
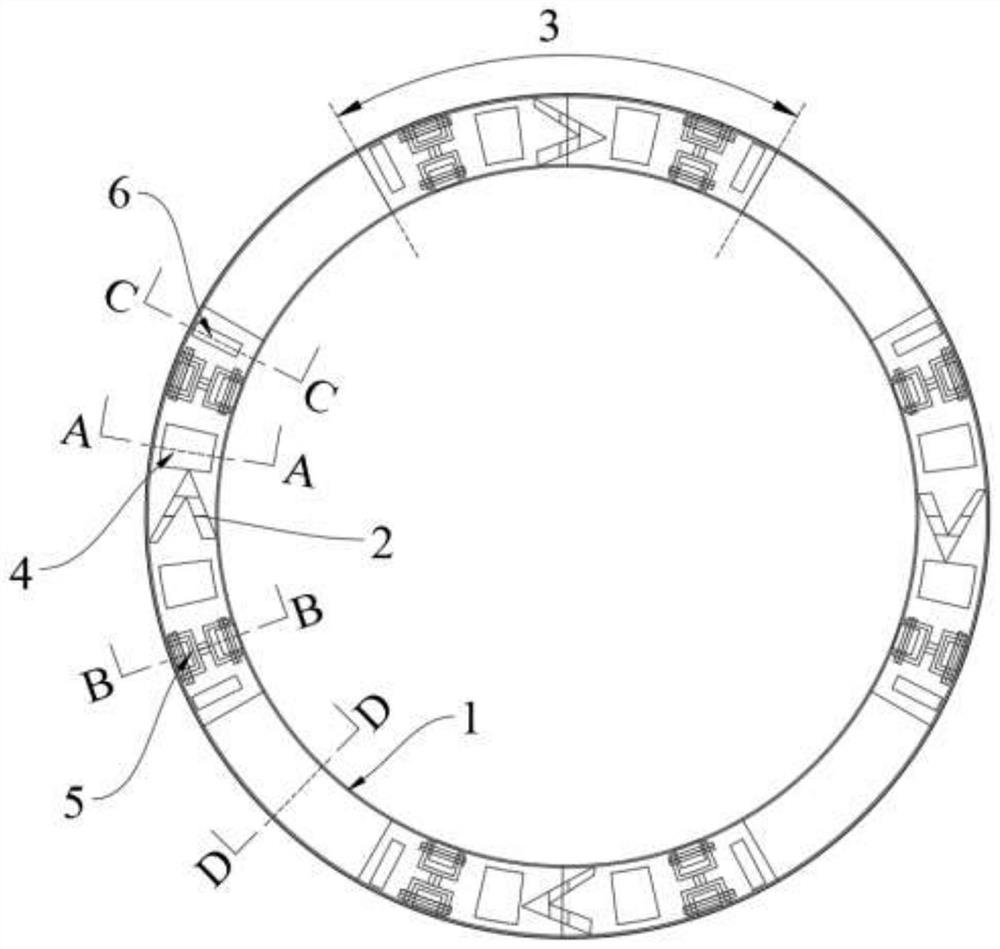
图1为实施例一的中空回转环形岩石巷道掘进机的示意图;
图2为图1的A-A的剖面示意图;
图3为图1的B-B的剖面示意图;
图4为图1的C-C的剖面示意图;
图5为图1的D-D的剖面示意图;
图6为实施例一的中空回转环形岩石巷道掘进机的在巷道中钻进的示意图;
图7为实施例二的中空回转环形岩石巷道掘进机的示意图;
图8为实施例三的中空回转环形岩石巷道掘进机的示意图;
图9为实施例四的中空回转环形岩石巷道掘进机的示意图;
图10为实施例五的中空回转环形岩石巷道掘进机的回转动力机构的内部示意图;
图11为实施例六的中空回转环形岩石巷道掘进机的回转动力机构的内部示意图;
图12为实施例七的中空回转环形岩石巷道掘进机的回转动力机构的内部示意图;
图13为实施例八的中空回转环形岩石巷道掘进机的回转动力机构的内部示意图。
具体实施方式
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
实施例一
如图1至图6所示,本实施例提供了一种中空回转环形岩石巷道掘进机,包括环形本体1;所述环形本体1包括环形的固定架11和安装在固定架11上的环形的刀盘12;所述刀盘12的顶面安装有刀具组件2;所述刀盘12与固定架11之间沿环形方向规则分布有多组动力组3;所述动力组3包括回转动力机构4和轴向动力机构;所述回转动力机构4用于驱动刀盘12沿固定架11作回转动作;所述轴向动力机构,用于驱动环形本体1在岩石巷道中前进或后退;所述刀盘12用于通过刀具组件2在岩石巷道中形成环形钻槽7;其中,本实施例中,环形本体1采用了四组动力组,每组动力组采用了两个对称分布的回转动力机构。
再参照图2所示,本实施例的一种中空回转环形岩石巷道掘进机中,所述回转动力机构4包括固定在刀盘12的齿条41、安装在固定架11上的并与齿条41配合的齿轮42、以及用于驱动齿轮42的第一驱动机构43;所述第一驱动机构43用于驱动齿轮42转动,并带动齿条41,使刀盘12沿固定架回转移动。本实施例采用了第一种形态的回转动力机构,具体为:齿条设置为与刀盘12对应的环形(同轴心),环形的齿条的一个环面与刀盘12固定,另一个环面分布有长度方向与刀盘的径向一致的齿,所述齿轮的轴向与刀盘的径向一致,并与齿条啮合。
再参照图2所示,本实施例的一种中空回转环形岩石巷道掘进机中,刀盘12的宽度大于固定架11的宽度,刀盘在露出固定架11的位置设置有排渣口13;用于将钻进时产生的岩石渣料排出。
再参照图1所示,本实施例的一种中空回转环形岩石巷道掘进机中,所述轴向动力机构为轮式轴向移动机构5和步进式轴向移动机构6;其中,本实施例中,每组动力组采用了两个对称分布的轮式轴向移动机构5和两个对称分布的步进式轴向移动机构6。
再参照图3所示,本实施例的一种中空回转环形岩石巷道掘进机中,所述轮式轴向移动机构包括移动轮51、移动轮驱动机构52;所述移动轮51的轮面与环形钻槽7的侧壁接触;所述移动轮驱动机构52用于驱动移动轮51带动环形本体1在环形钻槽7的深度方向前进或后退;其中,移动轮51可以为常规的用于行走的轮,也可包括履带式行走轮,选择履带式行走轮时,履带与环形钻槽7接触。
本实施例的一种中空回转环形岩石巷道掘进机中,所述移动轮驱动机构52与移动轮51通过蜗轮蜗杆53传动连接;所述轮式轴向移动机构还包括压紧机构54;所述压紧机构54用于为移动轮提供与环形钻槽7的压力。
再参照图4所示,本实施例的一种中空回转环形岩石巷道掘进机中,所述步进式轴向移动机构6包括径向支撑机构和轴向驱动机构64;所述轴向驱动机构64安装在固定架11上,用于驱动径向支撑机构沿环形钻槽7的深度方向前进或后退;所述径向支撑机构包括支撑端62和支撑驱动机构63;所述支撑端62为两个,分别对应的与环形钻槽7的外径内壁和内径内壁配合,所述支撑驱动机构63用于驱动两个支撑端62在环形钻槽7的外径内壁和内径内壁之间撑紧或脱离;所述支撑端62为与环形钻槽7的外径内壁和内径内壁配合的支撑板,支撑端62上还固定有与固定架径向方向一致的支撑杆61,两个支撑杆61之间设置有所述的支撑驱动机构63;所述轴向驱动机构64为两个,两个轴向驱动机构64的驱动端分别与对应的支撑杆61连接;其中,固定架11在与支撑杆61的位置设置有避让槽65,用于为固定架11与径向支撑机构相对运动时提供避让。
再参照图2至图5所示,本实施例的一种中空回转环形岩石巷道掘进机中,所述刀盘12与固定架11之间还安装有第一支撑轴承44;所述刀盘12通过第一支撑轴承44与固定架11装配,所述第一支撑轴承44用于减少刀盘12回转时与固定架11间的摩擦力,还用于刀盘12与固定架11的轴向限位和径向限位。
本实施例的一种中空回转环形岩石巷道掘进机,使用时,通过回转动力机构(可采用旋转电机或液压马达等)驱动齿轮,利用齿轮与齿条的啮合,驱动刀盘回转,刀盘通过其上固定的刀具组件进行钻进。
本实施例的一种中空回转环形岩石巷道掘进机,四组动力组中的回转动力机构可共同驱动,也可单独使用,可根据实际的回转阻力,选择,当然,为了使回转平稳,也可使用对称的回转动力机构驱动回转。
本实施例的一种中空回转环形岩石巷道掘进机,在刀盘回转的同时,还通过轴向动力机构使环形本体进行轴向的移动,具体的,本实施例所采用的为轮式轴向移动机构和步进式轴向移动机构组合使用,在实际过程中,通过移动轮驱动机构(可采用旋转电机或液压马达等)驱动移动轮转动,利用移动轮的轮面与环形钻槽侧壁的摩擦力,使环形本体沿环形钻槽的深度方向前进,当然,为了提高轮面与环形钻槽侧壁的摩擦力,可采用压紧机构(可采用液压推杆、电动推杆等)向移动轮的轮轴施压,同步的,步进式轴向移动机构中,通过支撑驱动机构驱动两个支撑端在环形钻槽7的外径内壁和内径内壁之间撑进,通过轴向驱动机构64(可采用液压推杆、电动推杆等)进行顶推,固定架在驱动轮和轴向驱动机构顶推的作用下,共同对刀盘施加钻进的推力;而在回退过程中,仅通过轮式轴向动力机构即可,步进式轴向移动机构的支撑端与环形钻槽7脱离。
本实施例的一种中空回转环形岩石巷道掘进机中,由于设置了四组的动力组,也就包括了8个步进式轴向移动机构,在钻进过程中,还可采用4+4的动作方式,即其中大致在周向上均匀分布的4个步进式轴向移动机构的径向支撑机构进行撑紧,另4个步进式轴向移动机构的径向支撑机构脱离,撑紧的4个步进式轴向移动机构中的轴向驱动机构将固定架向前顶推,直至该4个步进式轴向移动机构的径向支撑机构位于固定架的后限位处,脱离的4个步进式轴向移动机构的径向支撑机构移动至前进方向的限位处时,进行撑紧;然后,位于后限位处的4个步进式轴向移动机构脱离,重复前述的操作,进而实现环形本体1的连续向前钻进。
本实施例的一种中空回转环形岩石巷道掘进机中,由于设置了四组的动力组,多组动力组可配合使用,例如,在需要调整钻进角度时,可使其中部分的动力组进行推进,即可使环形本体的钻进方向按所需角度进行偏转。
再如图6所示,本实施例的一种中空回转环形岩石巷道掘进机,在钻进时,形成环形钻槽7,环形钻槽中心的岩石柱8,可采用其他机械设备进行处理,由于岩石柱8的四周皆为自由面,对岩石柱8的掘进,要更加容易。
实施例二
如图7所示,本实施例提供了一种中空回转环形岩石巷道掘进机,其与实施例一的不同点在于:动力组3中仅采用了轮式轴向移动机构。
本实施例中,也采用了四组动力组,采用轮式轴向移动机构的具体动作过程已经在实施例一中进行阐述,此处不再赘述。
实施例三
如图8所示,本实施例提供了一种中空回转环形岩石巷道掘进机,其与实施例一的不同点在于:动力组3中仅采用了步进式轴向移动机构。
本实施例中,也采用了四组动力组,其中,每组动力组中采用了4个步进式轴向移动机构,呈两两对称式分布;采用步进式轴向移动机构的具体动作过程已经在实施例一中进行阐述,此处不再赘述。
实施例四
如图9所示,本实施例提供了一种中空回转环形岩石巷道掘进机,其与实施例三的不同点在于:动力组3中仅采用了三组动力组3。
本实施例中,采用了三组动力组,其与四组动力组的动作过程类似。
实施例五
如图10所示,本实施例提供了一种中空回转环形岩石巷道掘进机中所采用的第二种形态的回转动力机构,具体为:齿条设置为环形,齿条的外径侧对应的与刀盘的内径侧外壁固定,齿条的内径侧周向分布有长度方向与刀盘的轴向一致的齿,齿轮的轴向与刀盘的轴向一致,并与齿条啮合;同时,刀盘的外径侧外壁与固定座的外径侧内壁间设置有环形滑轨45和环形滑块46;所述环形滑轨45和环形滑块46分别安装在固定架11和刀盘12上,所述刀盘12通过环形滑轨45和环形滑块46与固定架11装配;刀盘的外径侧外壁与固定座的外径侧内壁间还设置有径向限位轮47,用于刀盘12与固定架11的径向限位;当然按照本实施例的设计思路,还可将滑轨滑块结构设置在刀盘的内径侧,而齿条、齿轮设置在刀盘的外径侧。
实施例六
如图11所示,本实施例提供了一种中空回转环形岩石巷道掘进机中所采用的第三种形态的回转动力机构,与实施例一的不同点在于,不再采用第一支撑轴承,而是采用如实施例五中的滑轨和滑块结构,具体为:刀盘的在靠近固定架的环面设置有齿条,齿条上的齿的长度方向与刀盘的径向方向一致,刀盘的外径外侧面与固定架的外径内侧面、刀盘的内径外侧面与固定架的内径内侧面之间分别设置有所述的滑轨和滑块结构,并分别对应设置有径向限位轮47。
实施例七
如图12所示,本实施例提供了一种中空回转环形岩石巷道掘进机中,其对刀盘进行相反回转的设计,具体为:所述刀盘12包括外环刀盘121和内环刀盘122;所述外环刀盘121的内侧壁上和内环刀盘122的外侧壁上分别设置有齿条41;两个齿条41之间啮合同一齿轮42;所述齿轮42用于在旋转时带动外环刀盘121和内环刀盘122按相反的方向回转;所述外环刀盘121和内环刀盘122之间还设置有第二支撑轴承123;所述外环刀盘121通过第二支撑轴承123与内环刀盘122装配。
实施例八
如图13所示,本实施例提供了一种中空回转环形岩石巷道掘进机在地井施工的状态,本实施例中,排渣口13设置在刀盘12靠外径侧的位置上,并在排渣口的位置设置有泥浆收集装置14,用于排出钻进时产生的泥浆。
上述实施例的中空回转环形岩石巷道掘进机,采用环形的刀盘和固定架的设计方式,刀盘在固定架上并通过多组的动力组进行驱动,动力组可提供刀盘回转的动力,还可提供整机前进或后退的动力,可适应全方位多角度的巷道钻进;整体结构简单,成本低,同时,可连续作业,掘进速度快。
上述实施例不应以任何方式限制本发明,凡采用等同替换或等效转换的方式获得的技术方案均落在本发明的保护范围内。
- 中空回转环形岩石巷道掘进机
- 一种中心回转步进自主推进式岩石巷道掘进机