一种水下航行器无线充电系统及控制方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于水下无线充电技术领域,具体涉及一种水下航行器无线充电系统及控制方法。
背景技术
由于海洋蕴藏着大量的自然资源和矿产资源,加上陆地资源的枯竭,近年来海洋资源的开发日益发达。随着深海活动的发展,水下航行器在海洋安全、海洋经济与科学、海洋考古、救援与军事等方面有着广泛的应用。此外,水下航行器是一种智能运动平台,可以在真实的海洋环境中依靠遥控或自主安全导航,完成管道检测、环境监测、水下搜救、海洋油气勘探开发等多种任务。
为了满足上述需求,需要水下航行器具有长时间续航的能力。在既不增加储能装置重量,又满足水下设备的密封性能的情况下,只能采用非接触式的无线充电技术。但在水下作业时,水下航行器总是受到洋流和模型不确定性等干扰的影响,发射线圈与接收线圈无法保持相对稳定位置来取得最佳的传输效率,导致充电速度慢,传输效率低等问题。
发明内容
本发明所要解决的技术问题是针对上述现有技术的不足,提供一种水下航行器无线充电系统及控制方法,能够在洋流影响下,使无线充电系统发射线圈与接收线圈保持相对稳定的位置关系,解决了水下充电效率低下的问题。
为实现上述技术目的,本发明采取的技术方案为:
一种水下航行器无线充电系统,包括海上发电平台、潜于海面以下的水下航行器和海平面以上的无线充电接收器;
所述航行器包括接收器运动控制模块、动态定位模块、控制模块、整流滤波电路和系统电源;
所述无线充电接收器与海上发电平台的发射端通过强磁耦合,产生变化电流传输至整流滤波电路,对系统电源进行充电;
所述接收器运动控制模块,用于调整无线充电接收器的位置和角度;
所述动态定位模块,用于保持航行器在水中的位置及方向;
所述控制模块,用于根据无线充电接收器和航行器反馈的状态信号控制各模块的运行,以保持接收线圈与发射线圈间的相对位置。
为优化上述技术方案,采取的具体措施还包括:
上述的接收器运动控制模块采用由舵机驱动的追踪机械臂,将无线充电接收器提升至海平面以上并实时调整无线充电接收器的状态。
上述的动态定位模块包括坐标定位模块、动力驱动模块与动态定位控制模块,动力驱动模块由四个水平推进器构成,动态定位控制模块分为运动控制器模块和动力分配模块;
坐标定位模块反馈海上发电平台与水下航行器的相对位置;
根据海上发电平台与水下航行器的相对位置,运动控制模块计算水下航行器控制律;
动力分配模块根据水下航行器控制律进行动力驱动模块的推进器的力和力矩分配,使航行器接近海上发电平台,达到功率消耗最小化;
根据海上发电平台与水下航行器的相对位置,接收器运动控制模块通过追踪机械臂对接收线圈状态进行微调,达到最优的传输效率。
上述的一种水下航行器无线充电系统的控制方法,包括:
控制模块控制动态定位模块获取海上发电平台与水下航行器的相对位置,
根据海上发电平台与水下航行器的相对位置,动态定位模块的运动控制模块计算水下航行器控制律;
动态定位模块的动力分配模块根据水下航行器控制律进行动力驱动模块的推进器的力和力矩分配,使航行器接近海上发电平台,达到功率消耗最小化;
接收器运动控制模块根据海上发电平台与水下航行器的相对位置调整无线充电接收器的位置和角度,达到最优的传输效率;
无线充电接收器与海上发电平台的发射端通过强磁耦合,产生变化电流传输至整流滤波电路,对系统电源进行充电。
上述的运动控制模块采用滑模控制计算水下航行器控制律,其设计过程具体为:
步骤1、构建水下航行器在地球固定坐标系(EF)下的动力学模型方程:
其中,向量η=[x y ψ]
其中,旋转矩阵J(ψ)是航向角函数,J
步骤2、设η
e(t)=η
关于时间的微分,等式(24)变成:
引入滑模面函数为:
其中,∧是恒定控制增益,为对角正矩阵。
步骤3、根据滑模控制器设计策略,构造水下航行器的控制律τ:
τ=τ
式中,τ
等效控制τ
τ
其中,
步骤4、根据等式(28)和(29),式(27)中水下航行器的鲁棒滑模控制定律重写如下:
用饱和函数替换符号函数,如下所示:
其中,Ф是为了引进边界层而给出的边界,式(31)中的滑模控制定律为:
上述的动力分配模块采用基于拉格朗日乘子的线性二次型控制分配方法进行动力分配,其设计过程包括以下步骤:
步骤一、等效控制输入τ和实际推力器动作U之间的关系假设为线性模型,其形式如下:
τ=TU (35)
其中,矩阵T不是方阵,并且具有全行秩和/或非平凡零空间,则存在满足等式(35)的无限多个控制向量U;
步骤二、采用了摩尔-彭若斯广义逆方法,首先,定义最小二乘成本函数:
U
其中,W是加权推进器成本的正定矩阵。式(36)表示动力分配将寻求实现期望广义力τ的解,同时最小化目标函数U
接下来,二次能量函数为:
根据以下条件最小化:
τ-TU=0 (38)
则选择拉格朗日函数表示为:
其中,λ表示拉格朗日乘数。
步骤三、方程(39)对U进行微分,得到以下方程:
步骤四、根据公式(38),公式(40)重写为:
τ=TW
得到拉格朗日乘法的最优解如下:
λ=(TW
将式(42)代入式(41),广义逆
因此,利用式(43),实际推力器动作U计算为:
本发明具有以下有益效果:
(1)采用机械臂来实时调整无线充电接收端与发射端的相对位置,所采用的机械臂有结构轻、载重/自重比高等特性,因而具有较低的能耗、较大的操作空间和很高的效率,其响应快速而准确。在海平面以上进行电能无线传输,也避免海水介质的影响。
(2)采用滑模控制策略设计控制系统,在模型不确定性、系统参数变化、外部干扰等方面具有优良的品质特性、鲁棒性以及良好的动态和稳态响应。
(3)控制分配模块采用基于拉格朗日乘子的线性二次型方法有助于将滑模定律计算得到的广义力和力矩分配给推进系统的各个推进器,从而使整个系统消耗的功率最小。
(4)通过水下航行器的状态保持、接收端实时追踪,实现更加高效的水下无线充电,解决在海水介质以及洋流及模型不确定的影响下,水下无线充电效率低的问题。
附图说明
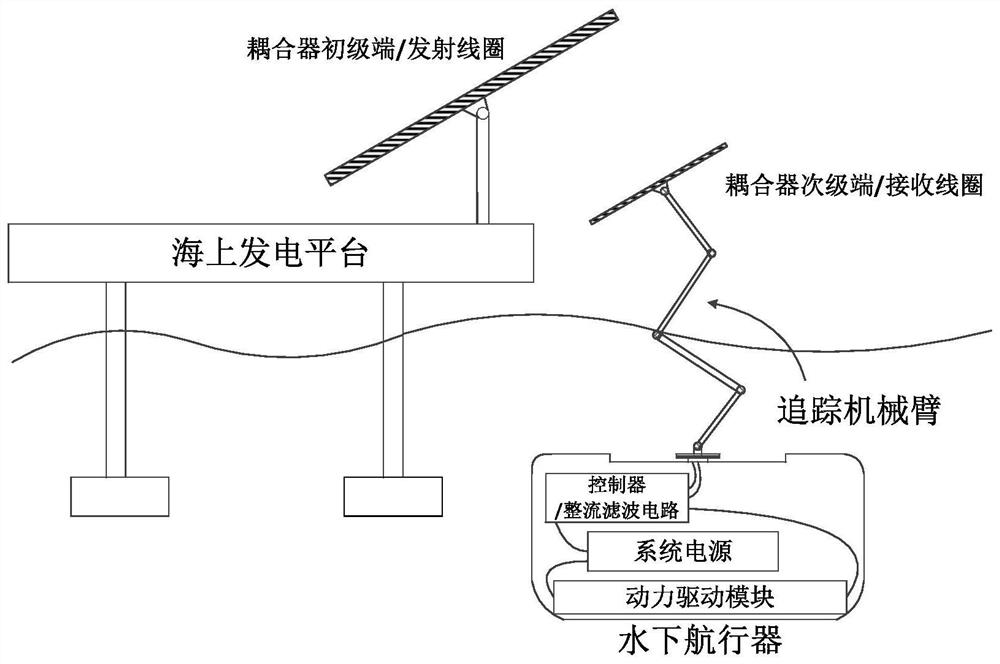
图1是水下航行器无线充电系统的结构示意图。
图2是水下航行器定位采用的坐标系示意图。
图3是水下航行器动力驱动模块四个推进器位置示意图。
图4是动力定位原理框图。
具体实施方式
以下结合附图对本发明的实施例作进一步详细描述。
如图1所示,本发明一种水下航行器无线充电系统,包括海上发电平台、潜于海面以下的水下航行器和海平面以上的无线充电接收器;
所述航行器包括接收器运动控制模块、动态定位模块、控制模块、整流滤波电路和系统电源;
本发明无线充电系统采用磁耦合谐振式无线传能技术,所述无线充电接收器与海上发电平台的发射端通过强磁耦合,产生变化电流传输至整流滤波电路,对系统电源进行充电;
所述接收器运动控制模块,用于调整无线充电接收器的位置和角度;
所述动态定位模块,用于保持航行器在水中的位置及方向;
所述控制模块,用于根据无线充电接收器和航行器反馈的状态信号控制各模块的运行,以保持接收线圈与发射线圈间的相对位置。
本发明控制模块采用基于滑模控制理论的鲁棒状态保持控制算法,以保证水下航行器在洋流扰动时的稳定性;还设计了一种动力优化分配控制算法,使系统的能量消耗最小。
本发明实现了更加高效的水下无线充电,减轻洋流、暗涌等的影响,从而保证水下航行器的充电效率。
实施例中,所述接收器运动控制模块采用由舵机驱动的追踪机械臂,将无线充电接收器提升至海平面以上并实时调整无线充电接收器的状态。
实施例中,所述动态定位模块包括坐标定位模块、动力驱动模块与动态定位控制模块,动力驱动模块由四个水平推进器构成,动态定位控制模块分为运动控制器模块和动力分配模块;
坐标定位模块反馈海上发电平台与水下航行器的相对位置;
根据海上发电平台与水下航行器的相对位置,运动控制模块计算水下航行器控制律;
动力分配模块根据水下航行器控制律进行动力驱动模块的推进器的力和力矩分配,使航行器接近海上发电平台,达到功率消耗最小化;
根据海上发电平台与水下航行器的相对位置,接收器运动控制模块通过追踪机械臂对接收线圈状态进行微调,达到最优的传输效率。
一种水下航行器无线充电系统的控制方法,包括:
控制模块控制动态定位模块获取海上发电平台与水下航行器的相对位置,
根据海上发电平台与水下航行器的相对位置,动态定位模块的运动控制模块计算水下航行器控制律;
动态定位模块的动力分配模块根据水下航行器控制律进行动力驱动模块的推进器的力和力矩分配,使航行器接近海上发电平台,达到功率消耗最小化;
接收器运动控制模块根据海上发电平台与水下航行器的相对位置调整无线充电接收器的位置和角度,达到最优的传输效率;
无线充电接收器与海上发电平台的发射端通过强磁耦合,产生变化电流传输至整流滤波电路,对系统电源进行充电。
如图2所示,水下航行器的动力模型由两部分组成,一部分是运动学模型,另一部分是动力学模型。使用两个坐标系:一个是坐标系(BF)固定在水下航行器上以定义其平移和旋转运动,另一个坐标系位于地球固定坐标系(EF)上以描述其位置和方向。本发明中,EF坐标系的原点固定在水面上,Z轴方向指向水下,X轴和Y轴方向构成右手坐标系。BF坐标系的原点位于水下航行器的重心,其中x、y、z轴分别指向HAUV的前方、右舷和下方。
观测变量η表示航行器在EF坐标系中的位置与姿态,用BF坐标系坐标原点在EF坐标系中的坐标(x,y,z)表示航行器在EF坐标系中的位置,同时用EF坐标系与BF坐标系之间的欧拉角(Ф,θ,ψ)表示航行器的姿态。
状态变量v表示航行器的BF坐标系线速度和角速度,其中(u,v,w)表示航行器的线速度,(p,q,r)表示航行器绕各轴旋转的角速度。
在讨论航行器的水平运动时,忽略垂荡、横摇和纵摇三种运动,即w=p=q=0。
HAUV在水平面上的运动可以描述如下:
η=[x y ψ]
v=[u v r]
BF坐标Bx
式中,旋转矩阵J(η)=J(ψ)是HAUV航向角的函数,定义如下:
水下航行器的运动学方程可以重新排列为:
将体坐标系BF中的前进线速度u、侧移线速度v、艏摇角速度r变换到地坐标系EF中,得到X轴上速度
通过减少HAUV在垂直平面运动中的垂荡、横摇和俯仰三种运动,BF框架中的水平运动动力学方程可以表示为:
其中,惯性矩阵M>0,M=M
式中,所有矩阵M、C(v)和D(v)可表示为:
m为水下航行器质量,x
矩阵中带下标的元素与矩阵M
向量τ表示外力及外力矩作用,不包括环境干扰,τ=[τ
水下航行器运动的三自由度方程的展开形式:
如图3所示,动力驱动模块由四个水平推进器构成,通过将这些水平推进器以固定倾角θ
矩阵形式的水平推进器分配可定义如下:
τ
式中,τ
由于洋流在流体流动和水下航行器之间产生相对速度,因此需要考虑对水下航行器的水动力效应。根据高斯-马尔可夫(Gauss-Markov)定理,洋流速度可建模为以下形式:
其中,μ
V
可以假设流体是无旋转的,EF坐标中的洋流速度矢量如下:
式中,
v
式中,ψ
通过旋转变换,可以得到EF坐标洋流速度与BF坐标洋流速度之间的关系:
其中,
考虑洋流影响的水下航行器动力模型,三个自由度水下航行器的相对速度(包括洋流的影响)可改写为:
水下航行器的动态模型,包括用BF坐标表示的洋流,其形式如下:
假设洋流速度是缓慢变化的,这意味着
因此,水下航行器的运动学和动力学模型(包括洋流)为:
如图4所示,为了系统地处理水下航行器的控制性能和功率方面的挑战,整个控制系统由两个级联模块组成,如滑模控制器和控制分配模块。滑模控制器模块负责根据每个自由度的当前状态和期望状态生成广义力和力矩,这些是实现水下航行器的期望位置和航向角所必需的。之后,控制分配模块有助于将这些广义力和力矩分配给推进系统的各个推进器,从而使整个系统消耗的功率最小。
滑模鲁棒控制器设计包括以下步骤:
为了简化控制器设计的复杂性,需要定义水下航行器在EF坐标下的动力学模型方程。为此,使用以下运动学变换:
两边求导,得
将等式(20),(21)代入式(19),可表示EF坐标系下水下航行器的动态模型:
其中,变换后的系统矩阵M
作为利用拉格朗日力学建立的动力系统,等式(22)中表示的水下航行器动力学方程具有以下假设:
假设1:惯性矩阵
假设2:矩阵
假设3:矩阵D
假设4:假设水下航行器模型中不确定性矩阵M
其中,∧和~分别表示估计系统矩阵和估计误差矩阵。
假设5:正有界对角矩阵满足下列不等式。
0≤λ
其中,λ
设η
e(t)=η
关于时间的微分,公式(24)变成:
现在,引入滑模面函数为:
其中,∧>0是恒定控制增益,为正对角矩阵。
根据滑模控制器设计策略,水下航行器的控制律τ被构造为:
τ=τ
式中,τ
τ
其中,β是开关控制增益的正定矩阵,滑模面的符号函数用sign(s)表示。此符号函数可以表示为:
根据等式(28)和(29),等式(27)中水下航行器的鲁棒滑模控制定律可重写如下:
为了避免使用等式(31)中的符号函数sign(s)产生抖振,可以构造饱和函数替换符号函数,如下所示:
其中,k根据实际情况选取。
其中,Ф是为了引进边界层而给出的边界,式(31)中的滑模控制定律为:
假设所有模型不确定性和干扰满足假设4,开关控制增益β根据式(34)选取。控制律τ由式(31)设计,则滑动面s渐近收敛到零,可以得出所设计的控制系统是渐近稳定的结论。
采用基于拉格朗日乘子的线性二次型控制分配包括以下设计步骤:
控制分配模块负责将根据滑模控制定律计算的力和力矩传递到可用的推进器组上,从而使功率消耗最小化。对于控制分配,采用拉格朗日乘子法。
等效控制输入τ和实际推力器动作U之间的关系可以假设为线性模型,其形式如下:
τ=TU (35)
其中,矩阵T不是方阵,并且具有全行秩和/或非平凡子空间。因此,存在满足等式(35)的无限多个控制向量U。
为了补偿推力器的冗余,采用了摩尔-彭若斯广义逆方法。首先,最小二乘成本函数可以定义为:
U
其中,W是加权推进器成本的正定矩阵。式(36)表示控制分配模块将寻求实现期望广义力τ的解,同时最小化目标函数U
接下来,二次能量函数被认为是:
可根据以下条件进行最小化
τ-TU=0 (38)
因此,选择拉格朗日函数,表示为:
其中,λ表示拉格朗日乘数。方程(39)对U进行微分,得到以下方程:
根据等式(38),等式(40)可以重写为:
τ=TW
最后,拉格朗日乘法的最优解可以得到如下:
λ=(TW
将式(42)代入式(41),矩阵T的广义逆
因此,利用式(43),实际推力器动作U可计算为:
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
- 一种水下航行器无线充电系统及控制方法
- 一种水下航行器燃料电池混合推进系统及控制方法