一种拖行式夹持泊车机器人及停车实现方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明属于智能泊车技术领域,特别涉及一种拖行式夹持泊车机器人及停车实现方法。
背景技术
随着家庭车辆的普及度增加,城市车辆随之增多,但城市内停车位却增加有限,且城市土地越来越稀缺,导致停车日益紧张,随着人们生活水平提高,对占地面积小、自动化水平高的停车方式的方式逐渐增加。采用智能泊车机器人将车辆搬运到停车位,来替代人工寻找停车位,能够有效增加相同面积下的停车数量,且在停车取车高峰期也不会出现停车场内堵塞的状况,这种停车方式和智能泊车机器人受到很多人的期待和青睐。其中,最重要的设备就是智能泊车机器人。
目前市场上已经出现了多种结构的智能泊车机器人,其中可以进入车辆底部,采用叉臂夹抱车辆轮胎促使车辆离开地面的泊车机器人,因其具有体积小、运动灵活、不需要对场地进行较大改造,而具有广泛的应用前景。但是,目前使用叉臂夹抱车辆轮胎促使车辆离开地面的泊车机器人是从侧向插入车辆底部,夹抱轮胎以实现将车辆抬离地面的目的。这与目前多数停车场的停车位是并排排列的情况相矛盾,这种停车位排列方式,更适合从车辆前方或后方插入车辆底部的泊车机器人,但是目前并没有出现从车辆前方或后方插入车辆底部,并采用叉臂夹抱车辆轮胎促使车辆离开地面的泊车机器人。
发明内容
鉴于现有技术中存在上述技术问题,本发明提供一种拖行式夹持泊车机器人及停车实现方法,该泊车机器人能够从车辆前方或后方插入车辆底部,并采用叉臂夹抱车辆轮胎促使车辆离开地面。
本发明的技术方案如下所述:
本发明提供一种拖行式夹持泊车机器人,所述拖行式夹持泊车机器人包括:
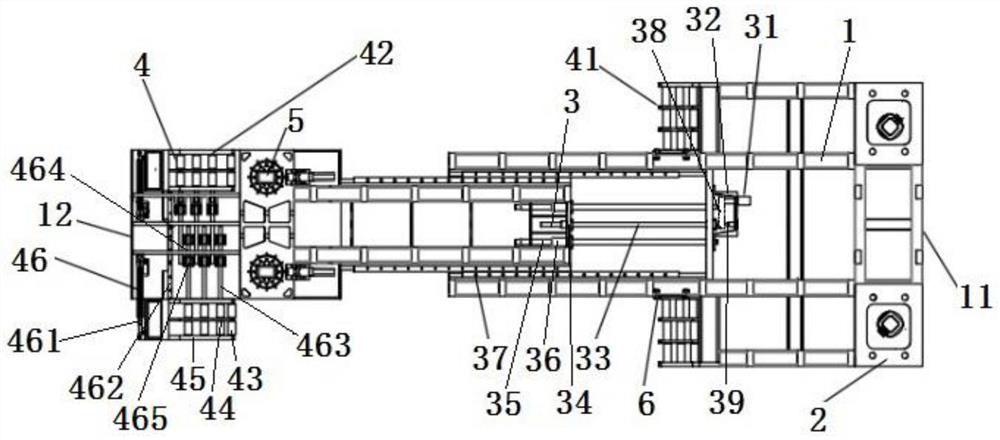
一机架1,所述机架整体呈T型,中部设有伸缩机构3,且伸缩机构3连接的两部分中其较宽的部分为大头端11,较窄的部分为伸缩端12;
一主动行走装置2,安装在大头端11的两侧,用于支撑机架1及驱动机架1移动;
一伸缩机构3,安装在机架1中部,用于调节机架1的长度,并调节第一轮胎托架41和第二轮胎托架42之间的距离;
二轮胎托架4,包括位于大头端11的第一轮胎托架41和位于伸缩端12的第二轮胎托架42,两者之间的距离可调,用于挤压轮胎以促使车辆离开地面;
一转向机构5,安装在伸缩端12的两侧,用于支撑机架1及转向。
进一步的,所述主动行走装置2包括两个舵轮21和减震机构22,所述舵轮21通过减震机构22固定安装在机架1上。驱动所述舵轮21能够带动该泊车机器人行进。所述减震装置22用于在路面颠簸时减震以及对舵轮21限位。
进一步的,所述伸缩机构3包括伸缩电机31、电机固定架32、伸缩丝杠33、丝杠螺母34、直线导轨35、直线轴承36及第一交叉导轨37。所述伸缩电机31通过电机固定架32固定安装在大头端11上,并驱动伸缩丝杠33旋转。所述伸缩丝杠33在大头端11的中心线上向伸缩端12延伸。在伸缩丝杠33的两侧设有与之平行的直线导轨35,所述直线导轨35的两端都固定安装在大头端11上。所述丝杠螺母34、直线轴承36都固定安装在伸缩端12的同一端,并分别与伸缩丝杠33、直线导轨35相配合,所述直线轴承36与直线导轨35之间滑动连接。在大头端11与伸缩端12之间发生滑动接触的部分设有第一交叉导轨37,其与伸缩丝杠33相平行。所述伸缩电机31用于提供动力,所述伸缩丝杠33和丝杠螺母34用于动力的传动,所述直线导轨35和第一交叉导轨37都用于导向,所述第一交叉导轨37还用于负载。当启动伸缩电机31,带动伸缩丝杠33顺时针或逆时针转动,带动丝杠螺母34沿着伸缩丝杠做直线运动,即带动伸缩端12沿着直线导轨35和第一交叉导轨37做直线运动,从而实现对机架1长度的调节,和对第一轮胎托架41和第二轮胎托架42之间距离的调节。
进一步的,所述伸缩电机31的输出端经过同步带38与伸缩减速机39的输入端相连。
进一步的,所述轮胎托架4包括滚动轴套43、滚轴44和轴架45。所述滚动轴套43套在滚轴44上;所述滚轴44平行地排成多排的,且其两端固定安装在轴架45上;所述轴架45包括一个与滚轴44平行的支架和至少两个与滚轴44垂直的支架。滚动轴套43能够在滚轴44上滚动,将滑动摩擦力变为滚动摩擦力,能够有效减小挤压车辆轮胎时使轮胎被挤上轮胎托架所需要的力。
进一步的,两个所述第一轮胎托架41分别固定安装在大头端11由宽变窄位置的两侧,且其滚轴44的滚动方向与伸缩机构3的伸缩方向相同。
进一步的,两个所述第二轮胎托架42通过滑移机构46安装在伸缩端的最末端的两侧,且其滚轴44的滚动方向与伸缩机构3的伸缩方向相同。
进一步的,所述滑移机构46包括伸缩推杆461、第二交叉导轨462、导柱463、滑动轴承464和限位块465。所述伸缩推杆461、第二交叉导轨462、导柱463相互平行设置,其中,所述伸缩推杆461固定安装在伸缩端12上,其输出端与第二轮胎托架42固定连接;所述第二交叉导轨462的两部分分别固定安装在伸缩端12和第二轮胎托架42上;所述导柱463一端固定在第二轮胎托架42上,另一端通过滑动轴承464可滑动地插入伸缩端12上的导孔。所述限位块465固定在导柱463上。当启动伸缩推杆461伸长时,带动第二轮胎托架42沿着第二交叉导轨462和导柱463向外滑移,以将第二轮胎托架42弹出;当启动伸缩推杆461缩短时,带动第二轮胎托架42沿着第二交叉导轨462和导柱463向内滑移,以将第二轮胎托架42收回。所述滑动轴承464同时起到承托、滑动的作用。所述限位块465用于限位,防止轮胎托架掉落。
进一步的,所述转向机构5包括两个转向轮50。所述转向轮包括轮子51、轮毂52、轮轴53、交叉滚子轴承54、锥齿轮组55、电机固定架56、减速机57、转向电机58及固定块59。所述轮子51安装在轮轴53上,所述轮轴53的两端与固定块59固定连接,所述固定块59固定在轮毂52的中心孔内,所述轮毂52固定安装于交叉滚子轴承54的中心孔内。所述锥齿轮组55包括水平放置的环状齿轮551和由电机驱动的552小齿轮,且环状齿轮551和小齿轮552相配合。所述环状齿轮551内侧与轮毂52固定连接。所述转向电机58通过减速机57与小齿轮552同轴连接,且所述减速机57固定安装在电机固定架56上。所述电机固定架56与所述交叉滚子轴承54与伸缩端12固定连接。启动转向电机58,通过减速机57带动小齿轮552顺时针或逆时针旋转,小齿轮552带动环状齿轮551旋转,从而带动轮毂52、轮轴52、轮子51及交叉滚子轴承54的下面部分旋转,交叉滚子轴承54的上面部分不旋转,以使轮子51的前进方向发生转变(即轮子51转向)。
进一步的,所述拖行式夹持泊车机器人还包括:
光电感应器6,位于轮胎托架4上或其一侧,用于感应车辆轮胎的位置;
激光避障导航装置,位于大头端11最前方,用于泊车机器人的避障和导航;
电源,用于向泊车机器人各结构供电。
上述拖行式夹持泊车机器人的初始状态为伸缩机构收缩至最短状态,滑移机构处于收回状态。当其抬起车辆时,控制主动行走装置和转向装置使其从车辆的前方或后方插入车辆的下方,当第一轮胎托架碰到车轮时,不再进行插入动作,并控制伸缩机构伸长;当第二轮胎托架的光电感应器感应到车轮时,控制伸缩机构伸长适当长度后停止,再控制滑移机构将第二轮胎托架弹出;控制伸缩机构收缩,至车辆的轮胎都已经离开地面,完成抬起车辆的动作。当其放下车辆时,控制伸缩机构伸长至适当长度后停止,再控制滑移机构将第二轮胎托架收回;控制伸缩机构收缩至最短状态,并控制主动行走装置和转向装置使其从车辆的前方或后方离开。
本发明还提供上述拖行式夹持泊车机器人的停车实现方法,所述方法包括如下步骤:
S01:控制主动行走装置和转向装置,根据车辆的位置和朝向,使泊车机器人的伸缩端从车头或车尾插入车辆的底部,直到第一轮胎托架上碰到车轮时停止;
S02:控制伸缩机构伸长,根据车辆的轴距,使第二轮胎托架在弹出后位于车辆后轮的或方或前轮的前方;
S03:控制第二轮胎托架的滑移机构弹出第二轮胎托架,使第二轮胎托架在移动后能够接触到车轮;
S04:控制伸缩机构缩短,根据车辆的轴距,使第一轮胎托架与第二轮胎托架之间的距离小于车辆的轴距;
S05:控制主动行走装置和转向装置,根据导航的路线,使泊车机器人的向目标位置行进;
S06:当到达目标位置后,控制伸缩机构伸长,使第二轮胎托架不再接触车轮;
S07:控制第二轮胎托架的滑移机构收回第二轮胎托架;
S08:控制主动行走装置和转向装置,使泊车机器人走出从车头或车尾车辆的底部。
本发明具有以下有益效果:
1、本发明机器人采用的是从汽车前后叉车,可以适用现有只能纵向进车的停车场或立体车库;
2、机架可伸缩、轮胎托架可弹出收回,适用于绝大多数车辆,同时减小了非工作状态下的占用空间;
3、采用挤压轮胎使车辆离开地面的方式,没有升降机构,节省了成本,降低了泊车机器人的高度;
4、不需要借助辅助工具取车,更方便更节约时间,更节约成本和资源;
5、轮胎托板安装有能滚动的轴套,减小了挤压车轮过程中的摩擦力,即减小了对车轮的损伤。
附图说明
图1为本发明实施例中的拖行式夹持泊车机器人的结构示意图;
图2为本发明实施例中的主动行走的结构示意图;
图3为本发明实施例中的转向机构的结构示意图;
图4为本发明实施例中的转向机构的俯视图;
图5为本发明实施例中的泊车机器人将车辆抬离地面时的示意图;
其中,1为机架,11为大头端,12为伸缩端,2为主动行走装置,21为舵轮,22为减震机构,3为伸缩机构,31为伸缩电机,32为电机固定架,33为伸缩丝杠,34为丝杠螺母,35为直线导轨,36为直线轴承,37为第一交叉导轨,38为同步带,39为伸缩减速机,4为轮胎托架,41为第一轮胎托架,42为第二轮胎托架,43为轴套,44为滚轴,45为轴架,46为滑移机构,461为伸缩推杆,462为第二交叉导轨,463为导柱,464为滑动轴承,5为转向机构,50为转向轮,51为轮子,52为轮毂,53为轮轴,54为交叉滚子轴承,55为锥齿轮组,551为环状齿轮,552为小齿轮,56为电机固定架,57为减速机,58为转向电机,59为固定块,6为光电感应器。
具体实施方式
为了更清楚地说明本发明的技术方案,下面结合具体实施例和附图进行说明,显而易见地,下面描述中的实施例仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
实施例1
本实施例涉及一种拖行式夹持泊车机器人,如图1-4所示,所述拖行式夹持泊车机器人包括:
一机架1,所述机架整体呈T型,中部设有伸缩机构3,且伸缩机构3连接的两部分中其较宽的部分为大头端11,较窄的部分为伸缩端12;
一主动行走装置2,安装在大头端11的两侧,用于支撑机架1及驱动机架1移动;
一伸缩机构3,安装在机架1中部,用于调节机架1的长度,并调节第一轮胎托架41和第二轮胎托架42之间的距离;
二轮胎托架4,包括位于大头端11的第一轮胎托架41和位于伸缩端12的第二轮胎托架42,两者之间的距离可调,用于挤压轮胎以促使车辆离开地面;
一转向机构5,安装在伸缩端12的两侧,用于支撑机架1及转向;
光电感应器6,位于轮胎托架4上或其一侧,用于感应车辆轮胎的位置;
激光避障导航装置,位于大头端11最前方,用于泊车机器人的避障和导航;
电源,用于向泊车机器人各结构供电。
如图2所示,所述主动行走装置2包括两个舵轮21和减震机构22,所述舵轮21通过减震机构22固定安装在机架1上。驱动所述舵轮21能够带动该泊车机器人行进。所述减震装置22用于在路面颠簸时减震以及对舵轮21限位。所述减震装置22是橡胶减震器。
如图1所示,所述伸缩机构3包括伸缩电机31、电机固定架32、伸缩丝杠33、丝杠螺母34、直线导轨35、直线轴承36及第一交叉导轨37。所述伸缩电机31通过电机固定架32固定安装在大头端11上,并驱动伸缩丝杠33旋转。所述伸缩丝杠33在大头端11的中心线上向伸缩端12延伸。在伸缩丝杠33的两侧设有与之平行的直线导轨35,所述直线导轨35的两端都固定安装在大头端11上。所述丝杠螺母34、直线轴承36都固定安装在伸缩端12的同一端,并分别与伸缩丝杠33、直线导轨35相配合,所述直线轴承36与直线导轨35之间滑动连接。在大头端11与伸缩端12之间发生滑动接触的部分设有第一交叉导轨37,其与伸缩丝杠33相平行。所述伸缩电机31用于提供动力,所述伸缩丝杠33和丝杠螺母34用于动力的传动,所述直线导轨35和第一交叉导轨37都用于导向,所述第一交叉导轨37还用于负载。当启动伸缩电机31,带动伸缩丝杠33顺时针或逆时针转动,带动丝杠螺母34沿着伸缩丝杠做直线运动,即带动伸缩端12沿着直线导轨35和第一交叉导轨37做直线运动,从而实现对机架1长度的调节,和对第一轮胎托架41和第二轮胎托架42之间距离的调节。其中,所述伸缩电机31的输出端经过同步带38与伸缩减速机39的输入端相连。
如图1所示,所述轮胎托架4包括滚动轴套43、滚轴44和轴架45。所述滚动轴套43套在滚轴44上;所述滚轴44平行地排成多排的,且其两端固定安装在轴架45上;所述轴架45包括一个与滚轴44平行的支架和至少两个与滚轴44垂直的支架。滚动轴套43能够在滚轴44上滚动,将滑动摩擦力变为滚动摩擦力,能够有效减小挤压车辆轮胎时使轮胎被挤上轮胎托架所需要的力。其中,两个所述第一轮胎托架41分别固定安装在大头端11由宽变窄位置的两侧,且其滚轴44的滚动方向与伸缩机构3的伸缩方向相同;两个所述第二轮胎托架42通过滑移机构46安装在伸缩端的最末端的两侧,且其滚轴44的滚动方向与伸缩机构3的伸缩方向相同。
其中,所述滑移机构46包括伸缩推杆461、第二交叉导轨462、导柱463、滑动轴承464和限位块465。所述伸缩推杆461、第二交叉导轨462、导柱463相互平行设置,其中,所述伸缩推杆461固定安装在伸缩端12上,其输出端与第二轮胎托架42固定连接;所述第二交叉导轨462的两部分分别固定安装在伸缩端12和第二轮胎托架42上;所述导柱463一端固定在第二轮胎托架42上,另一端通过滑动轴承464可滑动地插入伸缩端12上的导孔。所述限位块465固定在导柱463上。当启动伸缩推杆461伸长时,带动第二轮胎托架42沿着第二交叉导轨462和导柱463向外滑移,以将第二轮胎托架42弹出;当启动伸缩推杆461缩短时,带动第二轮胎托架42沿着第二交叉导轨462和导柱463向内滑移,以将第二轮胎托架42收回。所述滑动轴承464同时起到承托、滑动和限位的作用。
如图3和图4所示,所述转向机构5包括两个转向轮50。所述转向轮包括轮子51、轮毂52、轮轴53、交叉滚子轴承54、锥齿轮组55、电机固定架56、减速机57、转向电机58及固定块59。所述轮子51安装在轮轴53上,所述轮轴53的两端与固定块59固定连接,所述固定块59固定在轮毂52的中心孔内,所述轮毂52固定安装于交叉滚子轴承54的中心孔内。所述锥齿轮组55包括水平放置的环状齿轮551和由电机驱动的552小齿轮,且环状齿轮551和小齿轮552相配合。所述环状齿轮551内侧分别与轮毂52固定连接。所述转向电机58通过减速机57与小齿轮552同轴连接,且所述减速机57固定安装在电机固定架56上。所述电机固定架56与所述交叉滚子轴承54与伸缩端12固定连接。启动转向电机58,通过减速机57带动小齿轮552顺时针或逆时针旋转,小齿轮552带动环状齿轮551旋转,从而带动轮毂52、轮轴52、轮子51及交叉滚子轴承54的下面部分旋转,交叉滚子轴承54的上面部分不旋转,以使轮子51的前进方向发生转变(即轮子51转向)。
实施例2
本实施例涉及实施例1中的泊车机器人的停车实现方法,所述方法包括如下步骤:
S01:控制主动行走装置和转向装置,根据车辆的位置和朝向,使泊车机器人的伸缩端从车头或车尾插入车辆的底部,直到第一轮胎托架上碰到车轮时停止;
S02:控制伸缩机构伸长,根据车辆的轴距,使第二轮胎托架在弹出后位于车辆后轮的或方或前轮的前方;
S03:控制第二轮胎托架的滑移机构弹出第二轮胎托架,使第二轮胎托架在移动后能够接触到车轮;
S04:控制伸缩机构缩短,根据车辆的轴距,使第一轮胎托架与第二轮胎托架之间的距离小于车辆的轴距;当泊车机器人将车辆抬离地面时,车辆与第一轮胎托架和第二轮胎托架之间的位置关系如图5所示;
S05:控制主动行走装置和转向装置,根据导航的路线,使泊车机器人的向目标位置行进;
S06:当到达目标位置后,控制伸缩机构伸长,使第二轮胎托架不再接触车轮;
S07:控制第二轮胎托架的滑移机构收回第二轮胎托架;
S08:控制主动行走装置和转向装置,使泊车机器人走出从车头或车尾车辆的底部。
上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所做的任何等效变化或修饰,均应落入本发明的保护范围之内。本发明未涉及部分与现有技术相同或可采用现有技术加以实现。
- 一种拖行式夹持泊车机器人及停车实现方法
- 一种侧向夹持泊车机器人的精确控制停车实现方法