一种大阶比行星变速机构
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及行星变速传动技术领域,更具体的是涉及一种大阶比行星变速机构。
背景技术
电驱动车辆要求变速器具有大阶比,从而满足输出转速和转矩对需求,现有的行星变速机构在合适的k值(齿圈齿数与太阳轮齿数之比)范围内很难实现大传动比、大阶比。
发明内容
为了克服上述现有技术的不足,本发明提供了一种大阶比行星变速机构,以解决上述背景技术中提出的问题。
本发明解决其技术问题所采用的技术方案是:一种大阶比行星变速机构,包括第一行星排、第二行星排、第三行星排、第一制动器、第二制动器、第三制动器、离合器;
所述第一行星排为内外啮合双星行星排,包括第一太阳轮、第一齿圈和第一行星架;
所述第二行星排为内外啮合单星行星排,包括第二太阳轮、第二齿圈和第二行星架;
所述第三行星排为内外啮合双星行星排,包括第三太阳轮、第三齿圈和第三行星架;
所述第三太阳轮和第三行星架之间连接有离合器;
所述第一行星架与第二太阳轮连接或与第二太阳轮、第三齿圈连接;所述第一齿圈与第二行星架、第三太阳轮连接或与第二行星架连接。
作为优选,所述离合器为机械式换挡元件、液压式换挡元件或者气动式换挡元件。
作为优选,所述第一行星架为输入端、第三齿圈为输出端或所述第三太阳轮为输入端、第二行星架为输出端。
作为优选,所述第一制动器、第二制动器和第三制动器为机械式换挡元件、液压式换挡元件或者气动式换挡元件,所述第一制动器用于制动第一太阳轮,所述第二制动器用于制动第二齿圈,所述第三制动器用于制动第三行星架。
作为优选,所述第二制动器和第三制动器接合、第一制动器和离合器分离时,实现一档,所述第二制动器和离合器接合、第一制动器和第三制动器分离时,实现二档,所述第一制动器和第三制动器接合、第二制动器和离合器分离时,实现三档,所述第一制动器和离合器接合、所述第二制动器和第三制动器分离时,实现四档。
作为优选,所述一档的传动比范围为6~24,所述二档的传动比范围为3~6,所述三档的传动比范围为2.67~8,所述四档的传动比范围为1.33~2。
作为优选,所述一档、二档的阶比范围为2~4,所述二档、三档的阶比范围为0.53~2.67,所述三档、四档的阶比范围为2~4。
本发明的有益效果如下:该发明通过制动器或离合器的不同接合方式从而建立起4个前进速比,该发明的三个行星排在合适的k值(齿圈齿数与太阳轮齿数之比)下,阶比可以达到2甚至更高,因此具有大阶比、结构紧凑、承载能力大、传动效率较高的优点,适用于大功率电驱动车辆、大型矿山机械、油田机械等设备,同时也可应用于特种车辆上。
附图说明
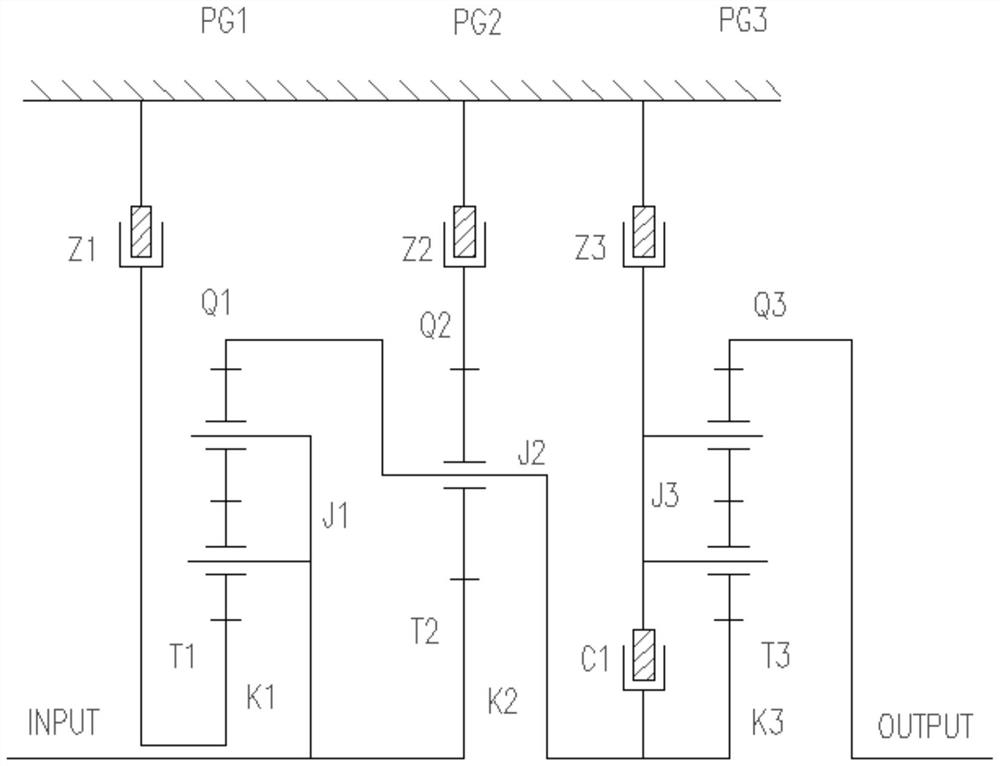
图1为本发明实施例1的整体结构示意图;
图2为本发明实施例2的整体结构示意图。
图中标记为:PG1:第一行星排,T1:第一太阳轮,J1:第一行星架,Q1:第一齿圈,PG2:第二行星排,T2:第二太阳轮,J2:第二行星架,Q2:第二齿圈,PG3:第三行星排,T3:第三太阳轮,J3:第三行星架,Q3:第三齿圈,Z1:第一制动器,Z2:第二制动器,Z3:第三制动器,C1:离合器,INPUT:输入,OUTPUT:输出。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
如图1所示,一种大阶比行星变速机构,包括第一行星排PG1、第二行星排PG2、第三行星排PG3、第一制动器Z1、第二制动器Z2、第三制动器Z3、离合器C1;
所述第一行星排PG1为内外啮合双星行星排,包括第一太阳轮T1、第一齿圈Q1和第一行星架J1;
所述第二行星排PG2为内外啮合单星行星排,包括第二太阳轮T2、第二齿圈Q2和第二行星架J2;
所述第三行星排PG3为内外啮合双星行星排,包括第三太阳轮T3、第三齿圈Q3和第三行星架J3;
所述第三太阳轮T3和第三行星架J3之间连接有离合器C1;
所述第一行星架J1与第二太阳轮T2连接;所述第一齿圈Q1与第二行星架J2、第三太阳轮T3连接。
所述离合器C1为机械式换挡元件、液压式换挡元件或者气动式换挡元件。
所述第一行星架J1为输入端、第三齿圈Q3为输出端。
本实例中各行星排在合适的k值范围内,通过设置三个制动器和离合器不同的接合和分离方式,可以实现大阶比四档传动。
所述第一制动器Z1、第二制动器Z2和第三制动器Z3为机械式换挡元件、液压式换挡元件或者气动式换挡元件,所述第一制动器Z1用于制动第一太阳轮T1,所述第二制动器Z2用于制动第二齿圈Q2,所述第三制动器Z3用于制动第三行星架J3。
本实施例可以实现四档变速,具体地,所述第二制动器Z2和第三制动器Z3接合、第一制动器Z1和离合器C1分离时,实现一档,所述第二制动器Z2和离合器C1接合、第一制动器Z1和第三制动器Z3分离时,实现二档,所述第一制动器Z1和第三制动器Z3接合、第二制动器Z2和离合器C1分离时,实现三档,所述第一制动器Z1和离合器C1接合、所述第二制动器Z2和第三制动器Z3分离时,实现四档。
其中,本发明实现从一档到四档,实现的传动比依次变化,且从一个档位切换至另一个档位时,旧档位对应的换挡元件要分离,新档位对应的换挡元件要接合。
结合表1验证本实施例中的档位传动比和阶比范围如下:
表1实施例1换挡元件状态表(留空表示分离,○表示接合)
在表1中列出了依据本实施例中的行星机构原理求得的传动比,其中K1、K2、K3分别是第一、第二、第三行星排的结构特征参数。
具体地,K1为第一齿圈Q1和第一太阳轮T1的齿数比,K2为第二齿圈Q2和第二太阳轮T2的齿数比,K3为第三齿圈Q3和第三太阳轮T3的齿数比。
由于实际结构中的轴、轴承、齿数、重合度等不能过小,齿圈和太阳轮的齿数比k值的实际范围受影响不能过大或者过小,内外啮合单星排k值适当范围可为2~5,内外啮合双星排k值适当范围可为2~4,即,K1和K3的取值范围可为2~4,K2的取值范围可为2~5。
各档位可实现的传动比范围取决于行星排结构特征参数,具体地,依据上述表1中的档位传动比公式和K1、K2、K3的取值范围,将K1、K2、K3的数值套用表1中公式计算后可知,可实现一档的传动比范围为6~24,可实现二档的传动比范围为3~6,可实现三档的传动比范围为2.67~8,可实现四档的传动比范围为1.33~2,可实现一、二档的阶比范围为2~4,可实现二、三档的阶比范围为0.53~2.67,可实现三、四档的阶比范围为2~4。
如,当K1=3.2,K2=4.5,K3=2时,一档的传动比为11,二档的传动比为5.5,三档的传动比为2.9,四档的传动比为1.45;一、二档的阶比为2,二、三档的阶比为1.9,三、四档的阶比为2。
上述实施例为减速机构,如果将其输入和输出端对调,则可得到增速机构,可实现一档的传动比范围为0.04~0.17,可实现二档的传动比范围为0.17~0.33,可实现三档的传动比范围为0.125~0.374,可实现四档的传动比范围为0.5~0.75,其阶比可依据类似分析得到,此处不再细述。
结合上相关说明,本实施例包括三个行星排、三个制动器和一个离合器,通过设置三个制动器和离合器不同的接合和分离方式,在合适的k值范围内,可以实现四档传动比,且阶比可以达到2甚至以上。
实施例2:
如图2所示,一种大阶比行星变速机构,本实施例类似实施例1的结构,两者主要区别在于,第三行星排PG3置于第一行星排PG1和第二行星排PG2之前。
所述第一行星架J1和第二太阳轮T2连接、第三齿圈Q3连接;所述第一齿圈Q1和第二行星架J2连接。
所述第三太阳轮T3为输入端,所述第二行星架J2为输出端。
除此之外,本实施例与实施例1的其他组件、连接方式、传动比、阶比等均相同。
以上的仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
- 一种大阶比行星变速机构
- 行星变速机构和行星变速电机