连发施夹钳的凸轮控制机构
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于医疗器械技术领域,尤其涉及一种连发施夹钳的凸轮控制机构。
背景技术
施夹钳是一种手术器械,用于在外科手术中对组织夹进行夹闭操作。组织夹通常可采用金属材料,例如钛夹,也可以采用其他的材质,例如塑料夹。组织夹在进行夹持时,需先将组织夹推出施夹钳,再利用钳头闭合组织夹以实现夹持。但有的组织夹,例如塑料材质的组织夹,在顶出至施夹钳钳头位置时会有一个大幅度的自动弹开动作,这给医护人员手术操作时带来不便。
故针对这一问题,发明人尝试采用分步进给的方式来解决。即通过第一进给机构和第二进给机构实现钳头的两步夹持,第一进给机构先完成第一步将钳头夹到一定开度,这样在组织夹被推出时,可以有效减小组织夹自动弹开动作的幅度,然后再利用第二进给机构缓缓夹持至完全闭合。但随着而来的问题就是组织夹推出的时机如何控制的问题。若以现有技术中施夹钳采用的匀速推进的方式,显然与两步夹持的动作不能很好的匹配。而将施夹钳夹头的施加动作和组织夹的推进动作分别利用两套机构进行控制,则产品结构会变得十分复杂,操作起来也不够方便。
发明内容
本发明的目的是针对上述问题,提供一种能适用钳头分步夹持动作的连发施夹钳的凸轮控制机构。
为达到上述目的,本发明采用了下列技术方案:
一种连发施夹钳的凸轮控制机构,包括用于推动组织夹的组织夹推进结构,还包括驱动手柄,所述驱动手柄的一侧设有与驱动手柄驱动连接的异形凸轮,所述异形凸轮上设有异形凹槽,所述异形凹槽由若干段与异形凸轮的转动中心距离不相同的弧段组成,所述异形凸轮与组织夹推进结构之间设有传动组件,所述传动组件一端滑动连接在异形凹槽内,另一端转动连接在组织夹推进结构上。
在上述的连发施夹钳的凸轮控制机构中,所述异形凹槽包括依次连通的第一弧段、第二弧段和第三弧段;
所述第一弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为20-40度,第一弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下;
所述第二弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为10-30度,第二弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为20mm以下;
所述第三弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为30-50度,第三弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下。
在上述的连发施夹钳的凸轮控制机构中,所述第一弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为30度,第一弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为0.75mm;
所述第二弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为20度,第二弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为3.75mm;
所述第三弧段在以异形凸轮转动中心为圆心的圆的圆弧上投影的弧度为40度,第三弧段的两端在以异形凸轮转动中心为圆心的圆的径向方向上投影的距离之差为0.25mm。
在上述的连发施夹钳的凸轮控制机构中,所述异形凸轮包括凸轮主体和设置在凸轮主体上的转动连接孔,所述凸轮主体远离异形凹槽的一侧设有传动齿,所述凸轮主体通过传动齿与驱动手柄驱动连接。
在上述的连发施夹钳的凸轮控制机构中,所述驱动手柄靠近异形凸轮的一侧设有驱动齿,所述驱动齿与传动齿之间设有齿轮,所述齿轮的两侧分别与驱动齿和传动齿相啮合。
在上述的连发施夹钳的凸轮控制机构中,还包括用于推动钳头推杆以带动钳头张开或夹紧的推进结构,驱动手柄与推进结构之间还设有第一进给机构和第二进给机构,所述驱动手柄通过第一进给机构推动推进结构进入第一进给空间内,所述驱动手柄通过第二进给机构推动推进结构进入第二进给空间内。
在上述的连发施夹钳的凸轮控制机构中,所述第一进给机构位于第二进给机构的前端,转动所述驱动手柄,第一进给机构先于第二进给机构推动推进结构。
在上述的连发施夹钳的凸轮控制机构中,所述第一进给机构推动推进结构时,所述驱动手柄转过的角度为0-14度,所述第二进给机构推动推进结构时,所述驱动手柄转过的角度为25-41度。
在上述的连发施夹钳的凸轮控制机构中,所述驱动手柄转过的角度为15度时,所述第一进给机构完成对推进结构的推动,所述驱动手柄转过的角度为42度时,所述第二进给机构完成对推进结构的推动。
在上述的连发施夹钳的凸轮控制机构中,所述传动组件包括第一传动片和第二传动片,所述第一传动片上固定设置有第一销轴和第二销轴,第一传动片上还设有贯通第一传动片的导向通孔,所述第二传动片一端通与第一传动片转动连接,另一端与组织夹推进结构转动连接,第二传动片上还固定设置有第三销轴,所述第三销轴同时滑动连接在导向通孔和异形凹槽内。
与现有的技术相比,本发明的优点在于:
1、本发明用于驱动组织夹推进结构推动组织夹的异形凸轮上设有异形凹槽,且异形凹槽由若干段与异形凸轮的转动中心距离不相同的弧段组成,这样可以保证驱动手柄在匀速驱动的过程中组织夹推进结构可获得不同的推进速度,从而能较好的适用钳头分步夹持的动作。
、本发明结构简单,使用方便,适宜大规模推广使用。
附图说明
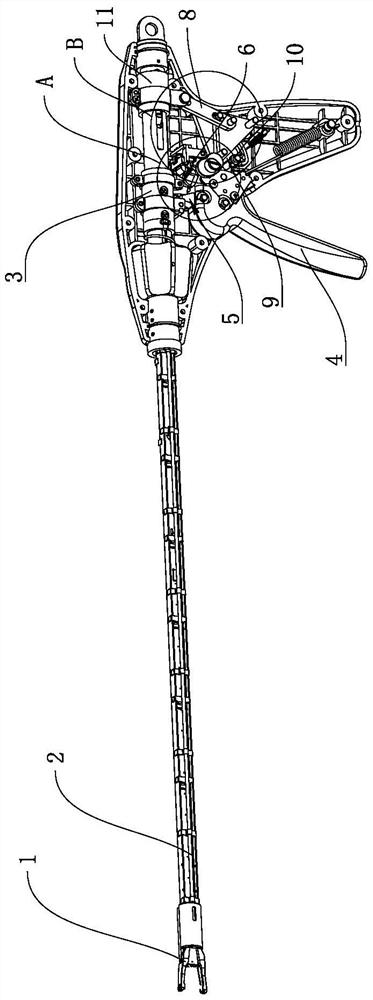
图1是本发明的结构示意图;
图2是图1中A处的放大图;
图3是异形凸轮的结构示意图;
图4是本发明部分结构的结构示意图;
图5是异形凸轮的凸轮曲线;
图6是图1中B处的放大图;
图7是第一进给机构和第二进给机构的结构示意图;
图8是保险组件的结构示意图;
图9是第一传动片间接固定的结构示意图;
图中:钳头1、钳头推杆2、推进结构3、驱动手柄4、第一进给机构5、第二进给机构6、保险组件7、传动组件8、异形凸轮9、异形凹槽10、组织夹推进结构11、第一弧段12、第二弧段13、第三弧段14、第一推动块51、第一推动组件52、安装座53、受力推块54、扭簧55、倒角56、第二推动块61、第二受力推块62、操作按钮71、保险传动组件72、锁舌73、框架74、摆臂75、滑块76、复位弹簧77、第一传动片81、第二传动片82、第一销轴83、第二销轴84、导向通孔85、第三销轴86、凸轮主体91、转动连接孔92、传动齿93、驱动齿94、齿轮96。
具体实施方式
下面结合附图和具体实施方式对本发明做进一步详细的说明。
结合图1和图2所示,一种连发施夹钳的凸轮控制机构,包括用于推动组织夹的组织夹推进结构11,还包括驱动手柄4,所述驱动手柄4的一侧设有与驱动手柄4驱动连接的异形凸轮9,所述异形凸轮9上设有异形凹槽10,所述异形凹槽10由若干段与异形凸轮9的转动中心距离不相同的弧段组成,所述异形凸轮9与组织夹推进结构11之间设有传动组件8,所述传动组件8一端滑动连接在异形凹槽10内,另一端转动连接在组织夹推进结构11上。
本发明,使用时,外力施加在驱动手柄4上,驱动手柄4发生转动从而驱动异形凸轮9发生转动,驱动异形凸轮9通过传动组件8将动力传递至组织夹推进结构11从而推动组织夹。但由于传动组件8通过异形凹槽10进行驱动,异形凹槽10又由若干段与异形凸轮9的转动中心距离不相同的弧段组成,故异形凸轮9在角速度匀速转动的过程中,传递至组织夹推进结构11后,组织夹推进结构11在直线方向上的推动速度是变速的。故本发明用于驱动组织夹推进结构11推动组织夹的异形凸轮9上设有异形凹槽10,且异形凹槽10由若干段与异形凸轮的转动中心距离不相同的弧段组成,这样可以保证驱动手柄4在匀速驱动的过程中组织夹推进结构11可获得不同的推进速度,从而能较好的适用钳头分步夹持的动作。
结合图2-5所示,所述异形凹槽10包括依次连通的第一弧段12、第二弧段13和第三弧段14;所述传动组件8包括第一传动片81和第二传动片82,所述第一传动片81上固定设置有第一销轴83和第二销轴84,优选地,第一销轴83设置在异形凸轮9的转动中心位置,以确保驱动过程的稳定。再结合图9所示,第一传动片81也可采用通过两侧的联轴板间接固定在外壳体上的连接方式。第一传动片81上还设有贯通第一传动片81的导向通孔85,所述第二传动片82一端通与第一传动片81转动连接,另一端与组织夹推进结构11转动连接,第二传动片82上还固定设置有第三销轴86,所述第三销轴86同时滑动连接在导向通孔85和异形凹槽10内。所述第一弧段12在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为20-40度,第一弧段12的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下;所述第二弧段13在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为10-30度,第二弧段13的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为20mm以下;所述第三弧段14在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为30-50度,第三弧段14的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为10mm以下。
即在驱动过程中,异形凸轮9转动过20-40度后,第三销轴86脱离第一弧段12,进入第二弧段13,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。异形凸轮9继续转动过10-30度后,第三销轴86脱离第二弧段13,进入第三弧段14,此时第三销轴86沿导向通孔85移动了20mm以下的距离。异形凸轮9继续转动过30-50度后,第三销轴86沿第三弧段14滑动至压设在异形凸轮9上,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。
优选地,所述第一弧段12在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为30度,第一弧段12的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为0.75mm;所述第二弧段13在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为20度,第二弧段13的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为3.75mm;所述第三弧段14在以异形凸轮9转动中心为圆心的圆的圆弧上投影的弧度为40度,第三弧段14的两端在以异形凸轮9转动中心为圆心的圆的径向方向上投影的距离之差为0.25mm。即达到如图5所示的凸轮曲线,此时钳头夹持和组织夹推进两个动作处于最适配状态。
结合图3和图4所示,所述异形凸轮9包括凸轮主体91和设置在凸轮主体91上的转动连接孔92,所述凸轮主体91远离异形凹槽10的一侧设有传动齿93,所述凸轮主体91通过传动齿93与驱动手柄4驱动连接。所述驱动手柄4靠近异形凸轮9的一侧设有驱动齿94,所述驱动齿94与传动齿93之间设有齿轮96,所述齿轮96的两侧分别与驱动齿94和传动齿93相啮合。驱动手柄4通过传动齿93、齿轮96和驱动齿94将动力传递至凸轮主体91上。
结合图1和图6所示,一种应用于连发施夹钳的分步进给机构,包括钳头1和一端连接在钳头1上的钳头推杆2,移动所述钳头推杆2可带动钳头1张开或夹紧,钳头推杆2和钳头1可采用现有技术中施夹钳常用的连接方式进行连接,以实现控制钳头1的启闭动作。所述钳头推杆2远离钳头1的一端连接有推进结构3,驱动手柄4与推进结构3之间还设有第一进给机构5和第二进给机构6,所述驱动手柄4通过第一进给机构5推动推进结构3进入第一进给空间内,所述驱动手柄4通过第二进给机构6推动推进结构3进入第二进给空间内。第一进给空间与第二进给空间即推进结构3在第一步进给后和第二步进给后的所在空间。
使用时,扳动驱动手柄4,使得第一进给机构5驱动推进结构3移动,直至推进结构3位于第一进给空间内,此时钳头1处于半闭合状态,此时驱动手柄4大约转过15度。继续扳动驱动手柄4,驱动手柄4大约转过25度时,钳头1重新打开,再扳动驱动手柄4,使得第二进给机构6驱动推进结构3移动,直至推进结构3位于第二进给空间内,此时钳头1处于夹紧状态,此时驱动手柄4大约转过42度。故本发明利用第一进给机构5和第二进给机构6实现钳头1的两步夹持,第一进给机构5先完成第一步将钳头1夹到一定开度,这样在组织夹被推出时,可以有效减小组织夹自动弹开动作的幅度,然后再利用第二进给机构6缓缓夹持至完全闭合,故更适用于顶出时会自动弹开的组织夹。
具体的说,所述第一进给机构5位于第二进给机构6的前端,转动所述驱动手柄4,第一进给机构5先于第二进给机构6推动推进结构3。这样的结构设计较为合理,便于第一进给机构5先完成第一步的驱动,在利用第二进给机构6完成第二步的驱动。再结合图5所示,所述第一进给机构5推动推进结构3时,所述驱动手柄4转过的角度为0-14度,当驱动手柄4转过的角度为15度时,所述第一进给机构5完成对推进结构3的推动;所述第二进给机构6推动推进结构3时,所述驱动手柄4转过的角度为25-41度,当驱动手柄4转过的角度为42度时,所述第二进给机构6完成对推进结构3的推动。
结合图6和图7所示,所述第一进给机构5包括固定连接在驱动手柄4上的第一推动块51和连接在推进结构3上的第一推动组件52,转动驱动手柄4可使第一推动块51压设在第一推动组件52上。使用时通过转动驱动手柄4,使得第一推动块51压设至第一推动组件52上,从而推动推进结构3。转过一定角度后,由于推进结构3前移以及第一推动块51的角度变化,使得第一推动块51与第一推动组件52之间的距离变大,第一推动块51与第一推动组件52相互脱离,此时第一步的进给完成。
具体的说,所述第一推动组件52包括固定连接在推进结构3上的安装座53和第一受力推块54,所述第一受力推块54一端转动连接在安装座53上,另一端向靠近驱动手柄4的方向延伸,扭簧55套设在受力推块54上。这样在施加较大的力时可使得第一受力推块54发生翻转,便于夹持完成后,第一推动块51从第一受力推块54的前端回复到第一受力推块54的后端。
优选地,所述第一受力推块54靠近第一推动块51一侧的底部设有呈圆弧形的倒角56。
结合图6和图7所示,所述第二进给机构6包括固定连接在驱动手柄4上的第二推动块61和固定连接在推进结构3上的第二受力推块62,转动驱动手柄4可使第二推动块61压设在第二受力推块62上。在第一步进给完成后,第二推动块61压设至第二受力推块62上,推动推进结构3进行第二步进给。
优选地,所述第一推动组件52较第二受力推块62更靠近钳头1,所述第一推动块51较第二推动块61更靠近钳头1,且第一推动块51与第二推动块61之间的距离大于第一推动组件52与第二受力推块62之间的距离。
结合图6-7所示,还包括用于防止夹子误夹的保险组件7,所述保险组件7的一端延伸至第一进给机构5和/或第二进给机构6内。本发明设有保险组件7,可在无需夹持时抵住第二进给机构6,以防止误夹。
具体的说,所述保险组件7包括框架74和连接在框架74上的保险传动组件72,所述保险传动组件72的一端连接有操作按钮71,另一端连接有锁舌73,所述操作按钮71通过保险传动组件72与锁舌73驱动连接,移动锁舌73可使锁舌73的一端延伸至第二进给机构6内,所述保险传动组件72包括一端转动连接在框架74上,另一端插入至操作按钮71内的摆臂75,还包括与框架74滑动连接的滑块76,转动摆臂75可使摆臂75压设在滑块76上,所述锁舌73固定连接在滑块76的一端,所述滑块76远离锁舌73的一端压设有复位弹簧77,所述复位弹簧77的另一端压设在保险传动组件72上。
需防止误夹时,锁舌73延伸至第二推动块61与第二受力推块62之间,这样转动驱动手柄4时,第二推动块61会压设在锁舌73底面被卡死而无法推动第二受力推块62。手术过程中需正常使用时,按压操作按钮71,操作按钮71带动摆臂75摆动,摆臂75一端压设在滑块76,滑块76带动锁舌73发生同步的远离第二进给机构6的滑动,此时复位弹簧77被压缩。
本发明的工作原理是:使用时,按压操作按钮71,操作按钮71带动摆臂75摆动,摆臂75一端压设在滑块76,滑块76带动锁舌73发生同步的远离第二进给机构6的滑动,此时复位弹簧77被压缩。再扳动驱动手柄4,使得第一推动块51压设至第一推动组件52上,从而推动推进结构3。转过一定角度后,由于推进结构3前移以及第一推动块51的角度变化,使得第一推动块51与第一推动组件52之间的距离变大,第一推动块51与第一推动组件52相互脱离,此时第一步的进给完成,此时钳头1处于半闭合状态,此时驱动手柄4大约转过15度。继续扳动驱动手柄4,驱动手柄4大约转过25度时,钳头1重新打开,再扳动驱动手柄4,第二推动块61压设至第二受力推块62上,推动推进结构3进行第二步进给,此时钳头1处于夹紧状态,此时驱动手柄4大约转过42度。与此同时,驱动手柄4发生转动而驱动异形凸轮9发生转动,异形凸轮9转动过20-40度后,第三销轴86脱离第一弧段12,进入第二弧段13,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。异形凸轮9继续转动过10-30度后,第三销轴86脱离第二弧段13,进入第三弧段14,此时第三销轴86沿导向通孔85移动了20mm以下的距离。异形凸轮9继续转动过30-50度后,第三销轴86沿第三弧段14滑动至压设在异形凸轮9上,此时第三销轴86沿导向通孔85移动了小于或等于5mm的距离。第三销轴86沿导向通孔85的滑动过程中会带动组织夹推进结构11沿直线运动。故异形凸轮9在角速度匀速转动的过程中,传递至组织夹推进结构11后,组织夹推进结构11在直线方向上的推动速度是变速的。由此可见,本发明用于驱动组织夹推进结构11推动组织夹的异形凸轮9上设有异形凹槽10,且异形凹槽10由若干段与异形凸轮的转动中心距离不相同的弧段组成,这样可以保证驱动手柄4在匀速驱动的过程中组织夹推进结构11可获得不同的推进速度,从而能较好的适用钳头分步夹持的动作。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
尽管本文较多地使用了钳头1、钳头推杆2、推进结构3、驱动手柄4、第一进给机构5、第二进给机构6、保险组件7、传动组件8、异形凸轮9、异形凹槽10、组织夹推进结构11、第一弧段12、第二弧段13、第三弧段14、第一推动块51、第一推动组件52、安装座53、受力推块54、扭簧55、倒角56、第二推动块61、第二受力推块62、操作按钮71、保险传动组件72、锁舌73、框架74、摆臂75、滑块76、复位弹簧77、第一传动片81、第二传动片82、第一销轴83、第二销轴84、导向通孔85、第三销轴86、凸轮主体91、转动连接孔92、传动齿93、驱动齿94、齿轮96等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
- 连发施夹钳的凸轮控制机构
- 连发施夹钳的凸轮控制机构