一种基于螺旋形IPMC驱动的三自由度并联微动平台
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及三自由度平台技术领域,尤其涉及一种基于螺旋形IPMC驱动的三自由度并联微动平台。
背景技术
多自由度运动平台可以模拟多种空间运动姿态,常见的多自由度运动平台包括三自由度运动平台和六自由度运动平台。相比六自由度运动平台,三自由度运动平台结构简单、成本低、易于解耦、便于控制(吴金波, 郭睿文, 于文超. 一种两转动一平动的三自由度运动平台. 中国发明专利, 201810897153.9),因而广泛应用于航空、航天、船舶、电子、娱乐设备、光学器件、精密制造、机器人系统等领域。
按结构形式分类,三自由度运动平台可以分为串联式和并联式。相比串联式,并联式的三自由度运动平台具有惯性小、刚性好、响应速度快等优点(孙梦馨. 非共振式压电直线电机的研究及其在多自由度平台中的应用, [博士学位论文]. 南京: 南京航空航天大学, 2018.)。传统的三自由度并联运动平台采用伺服系统及伺服电动缸作为驱动组件,难以实现小型化,不适于在作业空间有限的条件下工作。因此,发明一种基于智能材料驱动的三自由度并联微动平台,不仅可以满足小尺寸、微行程、高精度的作业要求,也有利于促进新材料向更多应用领域发展。
本发明使用新型智能材料IPMC以替代传统的伺服驱动组件。离子聚合物金属复合材料(Ionic Polymer Metal Composite,IPMC)是一种离子型电活性聚合物材料,由中间的离子交换膜和两侧的金属电极层构成,具有质量轻、驱动电压低、响应速度快、能量密度高、无噪声、柔性好等优点,作为驱动器有着广泛的应用前景(Mohsen Shahinpoor and KwangJ Kim. Ionic polymer–metal composites: I. Fundamentals. Smart Material andStructures, 2001, 10: 819-833.)。
发明内容
为解决上述问题,本发明提供一种基于螺旋形IPMC驱动的三自由度并联微动平台,采用能在电场作用下做三维运动的螺旋形IPMC代替传统的伺服系统及伺服电动缸,避免复杂的机械传动结构,可以在小空间内实现三自由度运动平台的俯仰、侧倾、旋转等动作。
一种基于螺旋形IPMC驱动的三自由度并联微动平台,包括基座组件、驱动组件和动平台,基座组件包括底座和与其相匹配的底座盖,该底座上设有三个固定支座,该固定支座铣有贯穿底座的斜向凹槽,该斜向凹槽的内壁面贴有铜箔;驱动组件为螺旋形IPMC,包括第一螺旋形IPMC、第二螺旋形IPMC和第三螺旋形IPMC,三个所述螺旋形IPMC一端夹装于所述斜向凹槽中,与所述铜箔接触,另一端连接所述动平台。
作为优选,三个固定支座以底座的中心为圆心,呈等角度圆周阵列分布。该布局有利于提高三自由度并联微动平台的稳定性。
作为优选,三个固定支座沿底座的直径方向对称加工有导线孔。
作为优选,底座上设有与底座盖相配合的环形槽,底座盖可在所述环形槽内自由转动。
作为优选,底座铣有导线槽。导线伸入导线槽,穿过导线孔,焊接在斜向凹槽壁面的铜箔上,作为输入信号的载体。螺旋形IPMC接收到信号后会产生径向扩张、轴向伸缩和整体扭转三种运动,从而拉动顶部动平台俯仰、侧倾和旋转。
作为优选,底座上设有与底座盖相配合的环形槽,底座盖可在所述环形槽内自由转动。
作为优选,底座盖上加工有三个底座盖通孔,三个底座盖通孔以底座盖的中心为圆心,呈圆周阵列分布,转动底座盖使三个底座盖通孔位于三个固定支座的正上方。
作为优选,对第一螺旋形IPMC、第二螺旋形IPMC和第三螺旋形IPMC施加的电压为1~3V。过低的电压无法使IPMC有效驱动,而过高的电压会导致IPMC使用寿命缩短。
本发明还公开了基于螺旋形IPMC驱动的三自由度并联微动平台的工作方法,同时对所述螺旋形IPMC独立施加正向或反向电压,使其沿轴向伸长、缩短、向内收缩顺时针扭转或向外扩张逆时针扭转,以实现顶部动平台俯仰、侧倾、旋转的三自由度复合运动。
作为优选,对所述第一螺旋形IPMC、第二螺旋形IPMC施加正向/反向电压,同时对第三螺旋形IPMC施加与其相反的电压,以实现顶部动平台前俯/后仰;对第一螺旋形IPMC施加正向/反向电压,同时对第二螺旋形IPMC、第三螺旋形IPMC施加与其相反的电压,以实现顶部动平台右倾/左倾;同时对第一螺旋形IPMC、第二螺旋形IPMC和第三螺旋形IPMC施加正向/反向电压,以实现顶部动平台的逆时针/顺时针旋转。
与现有技术相比,本发明具有如下的有益效果:
本发明创新性地提出采用智能材料IPMC作为驱动组件,设计出一种基于螺旋形IPMC驱动的三自由度并联微动平台,不仅可以实现俯仰、侧倾和旋转的三自由度复合运动,而且结构简单、体积小巧、拆卸方便、柔顺性好、功耗小、制造成本低、易于实现小型化,可以满足小尺寸、微行程、高精度的作业要求,在诸如微型装配、光学器件、微机电系统等领域中具有很好的应用前景。
附图说明
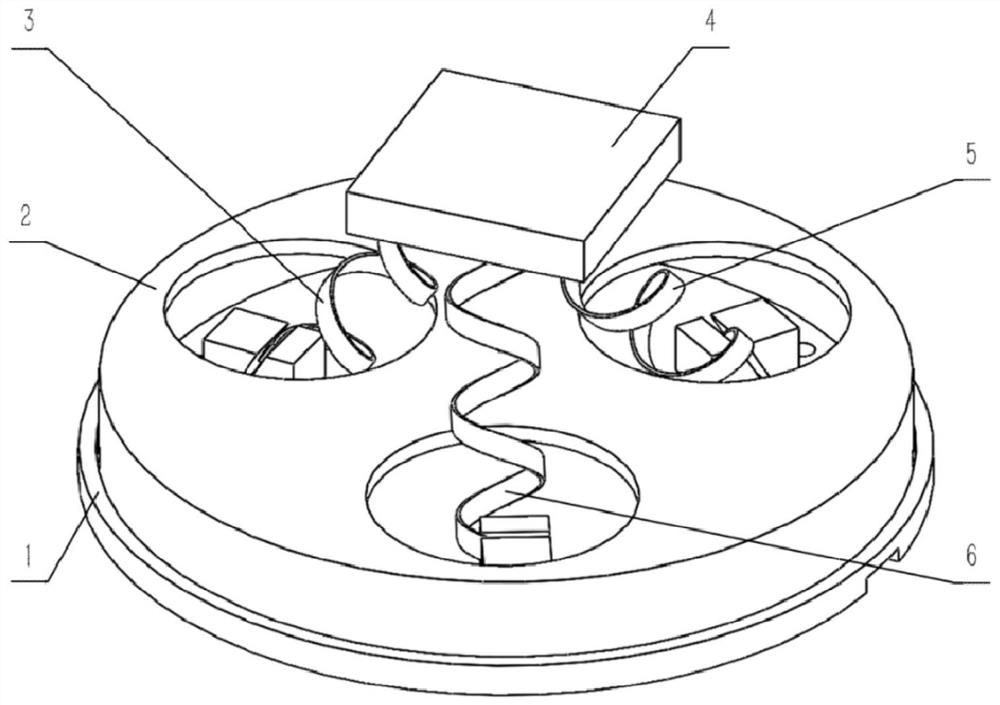
图1为本发明一个实施例的三自由度并联微动平台的结构示意图;
图2为本发明一个实施例的三自由度并联微动平台的俯视图;
图3为本发明一个实施例的底座的结构示意图;
图4为本发明一个实施例的底座的仰视图;
图5为本发明一个实施例的底座盖的结构示意图;
图6为本发明一个实施例的螺旋形IPMC的主视图。
附图标记:1底座,1-1固定支座,1-2斜向凹槽,1-3导线孔,1-4环形槽,1-5导线槽,2底座盖,2-1底座盖通孔,3第一螺旋形IPMC,4动平台,5第二螺旋形IPMC,6第三螺旋形IPMC。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明公开了一种基于螺旋形IPMC驱动的三自由度并联微动平台,采用能在电场作用下做三维运动的螺旋形IPMC代替传统的伺服系统及伺服电动缸,避免复杂的机械传动结构,可以在小空间内实现三自由度运动平台的俯仰、侧倾、旋转等动作。
结合图1至图6,一种基于螺旋形IPMC驱动的三自由度并联微动平台包括基座组件、驱动组件和动平台4。
基座组件包括圆盘状底座1和底座盖2,如图3所示,底座1为圆盘状,本实施例取底座1的直径为50mm,在该底座1上设有三个固定支座1-1,固定支座1-1以底座1的圆心为圆心,呈等角度圆周阵列分布。固定支座1-1铣有贯穿底座1的斜向凹槽1-2,该斜向凹槽1-2的内壁面贴有铜箔。斜向凹槽的倾角决定了三自由度并联微动平台的整体高度,本实施例取倾角为60°。三个固定支座1-1沿底座1的直径方向对称加工有导线孔1-3,本实施例取导线孔1-3的孔径为1.5mm。底座1还铣有导线槽1-5,本实施例取槽深1mm。导线伸入导线槽1-5,穿过导线孔1-3,焊接在斜向凹槽1-2壁面的铜箔上,作为输入信号的载体。
底座1设有与底座盖2相配合的环形槽1-4,槽深1mm,底座盖2可在所述环形槽1-4内自由转动。如图5所示,底座盖2加工有三个底座盖通孔2-1以对应三个固定支座1-1,本实施例取底座盖通孔的直径为16mm,三个底座盖通孔2-1以底座盖2的中心为圆心,呈圆周阵列分布,转动底座盖2使三个底座盖通孔2-1位于三个固定支座1-1的正上方。
驱动组件为螺旋形IPMC,包括第一螺旋形IPMC 3、第二螺旋形IPMC 5和第三螺旋形IPMC 6。如图6所示,螺旋形IPMC是由片状IPMC在90℃水浴加热的条件下螺旋定型得到的,在本实施例中,其结构参数如下:直径为5.00mm,长度为20.09mm,螺距为6.47mm,宽度为1.49mm。螺旋形IPMC一端夹装于斜向凹槽1-2中,并与铜箔接触良好。对所述第一螺旋形IPMC 3、第二螺旋形IPMC 5和第三螺旋形IPMC 6施加1~3V电压。直流信号和交流信号均可以作为输入信号。动平台4的质量为0-50mg,本实施例中的动平台质量为40mg。其最大俯仰角为30°,最大侧倾角为30°,最大旋转角为45°。
在电场作用下,离子交换膜内部的水合阳离子向阴极迁移,导致IPMC内、外两表面的应力和应变发生变化。基于此致动机理,螺旋形IPMC可同时产生三种空间运动形式:径向扩张运动、轴向伸缩运动和扭转运动。分别向第一螺旋形IPMC 3、第二螺旋形IPMC 5和第三螺旋形IPMC 6发送电信号,可独立控制三个螺旋形IPMC的运动,从而使顶部的动平台4实现俯仰、侧倾和旋转的三自由度复合运动。对第一螺旋形IPMC 3和第二螺旋形IPMC 5施加正向3V电压使其沿轴向伸长,同时对第三螺旋形IPMC 6施加反向3V电压使其沿轴向缩短,即可带动顶部动平台4前俯;对第一螺旋形IPMC 3和第二螺旋形IPMC 5施加反向3V电压使其沿轴向缩短,同时对第三螺旋形IPMC 6施加正向3V电压使其沿轴向伸长,即可带动顶部动平台4后仰;对第一螺旋形IPMC 3施加反向3V电压使其沿轴向缩短,同时对第二螺旋形IPMC5和第三螺旋形IPMC 6施加正向3V电压使其沿轴向伸长,即可带动顶部动平台4左倾;对第一螺旋形IPMC 3施加正向3V电压使其沿轴向伸长,同时对第二螺旋形IPMC 5和第三螺旋形IPMC 6施加反向3V电压使其沿轴向缩短,即可带动顶部动平台4右倾;对第一螺旋形IPMC3,第二螺旋形IPMC 5,第三螺旋形IPMC 6同时施加反向3V电压使其向内收缩顺时针扭转,即可带动顶部动平台4顺时针旋转;对第一螺旋形IPMC 3,第二螺旋形IPMC 5,第三螺旋形IPMC 6同时施加正向3V电压使其向外扩张逆时针扭转,即可带动顶部动平台4逆时针旋转。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。