一种无人机用收桨装置及其收桨方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发属于无人机机箱技术领域,具体是一种无人机用收桨装置及其收桨方法。
背景技术
无人机在存放时需要占用的大量的空间,其中,无人机的桨叶所占的面积远大于无人机的机身所占的面积。由其对于采用无人机自动机库对无人机进行自动化存放、充电等作业时,无人机自动机库的体积就必须非常大。
现有技术中多采用手动的方式对无人机的桨叶进行折叠,但是该种收桨方式在应用于无人机自动机库时,人工干预限制了无人机的自动化使用,部分无人机直接将桨叶做成具有自动折叠功能的桨叶,但势必会增加无人机的重量和生产成本,而且会使无人机的结构更加复杂。
发明内容
发明目的:一种无人机用收桨装置及其收桨方法,以解决现有技术存在的上述问题。
技术方案:一种无人机用收桨装置,包括平台,设置在所述平台周向的归中装置,所述归中装置用于将无人机推动至平台的指定区域;
转桨机构,设置在所述归中装置上,用于无人机机桨的收桨;
所述转桨机构,包括旋转模块,设置在所述旋转模块转动端的第一拨杆件和第二拨杆件,设置在所述第一拨杆件和第二拨杆件之间的扭簧,所述第一拨杆件和第二拨杆件能够旋转接触无人机浆叶推动浆叶收拢状态,设置在所述旋转模块的转动轴上的螺接在所述第二拨杆件上的转动片;
所述旋转模块采用旋转电机或者推杆机构;
所述推杆机构用于将第一拨杆件和第二拨杆件推送至预设的位置;
所述转桨机构复位时,所述第一拨杆件和第二拨杆件呈重合平行状态。
在进一步实施例中,:所述归中装置包括第一机械臂、第二机械臂、第三机械臂和第四机械臂;
所述第一机械臂与第二机械臂相互平行,所述第三机械臂与所述第四机械臂相互平行;
所述第一机械臂和第二机械臂位于所述第三机械臂和第四机械臂的下方;
所述第一机械臂、第二机械臂、第三机械臂和第四机械臂联动;
所述平台的底部安装有驱动电机,所述驱动电机的转动端通过皮带与所述第一机械臂连接;
所述驱动电机驱动所述第一机械臂和第二机械臂与第三机械臂和第四机械臂相对运动,进而推动着无人机至设定的区域内。
在进一步实施例中,所述第一机械臂、第二机械臂、第三机械臂和第四机械臂的两端分别设有锥形齿轮,所述锥形齿轮与所述锥形齿轮啮合;
所述第一机械臂、第二机械臂、第三机械臂和第四机械臂周向交替布设围城无人机放置区域。
在进一步实施例中,所述转桨机构分别设置在第三机械臂和第四机械臂上;
所述第三机械臂和第四机械臂上分别设两组转桨机构;
两组所述转桨机构相对布置。
在进一步实施例中,所述转桨机构还包括固定座,固定安装在所述固定座上的安装板,螺接在所述安装板两侧的机械限位开关;
所述安装板呈“U”型。
在进一步实施例中,所述第一拨杆件包括第一轴安装片,设置在所述第一轴安装片上的第一碳杆;
所述第一轴安装片包括第一工件和第二工件;
所述第一工件设为圆型,所述第二工件设置在第一工件上;
所述第一工件上设有第一凹槽和第二凹槽;
所述第二工件上设有插接部;
所述插接部与所述第一碳杆的直径适配。
在进一步实施例中,所述第二拨杆件包括第二轴安装片,设置在所述第二轴安装片上的第二碳杆;
所述第二轴安装片包括第三工件,与所述第三工件连接的第四工件;
所述第三工件上设有第三凹槽和开口,所述第四工件上设有通孔,所述通孔与所述第二碳杆适配;
与所述通孔垂直处设有夹紧部。
在进一步实施例中,所述固定座上设有限位柱,所述限位柱用于限制第一拨杆件转动的最大角度。
在进一步实施例中,所述转动片设置设计成扇形。
在进一步实施例中,一种无人机用收桨装置的收桨方法,包括如下步骤;
步骤1、无人机停在平台上;
步骤2、归中装置启动作业,驱动电机启动,进而第一机械臂和第二机械臂与第三机械臂和第四机械臂相互联动,向着相互的方向运动,将无人机推送至指定的位置;
步骤3、无人机归中后,归中装置复位至起始位置,然后转桨机构开启工作;
步骤4、旋转模块启动,带动着第一拨杆件和第二拨杆件沿着旋转模块的轴向转动,当第一拨杆件转动限位柱时,第一拨杆件停止转动,第二拨杆件继续主动通过第一拨杆件和第二拨杆件拨动浆叶,将无人机叶片均收拢至指定的区域。
有益效果:本发明公开了一种无人机用收桨装置及其收桨方法,通过在归中装置上安装了转桨机构,该结构适用于桨叶朝下安装且桨叶是2个浆片能绕其固定点单独自由转动的,通过转桨机构将无人机的浆叶收拢至指定的区域内,大幅减少了无人机的占用空间,若浆叶向上安装的需要改变结构;但收浆的方法一样,先同时旋转第一拨杆件和第二拨杆件通过拨杆件摆动桨叶旋转,与此同时第一拨杆件和第二拨杆件通过相应结构张开成一定的夹角。且第一拨杆件和第二拨杆件分别置于2个浆片一侧。随后归中杆再次进行归中操作。桨叶将被第一拨杆件和第二拨杆件的横向运动的作用下自动收拢到内侧。使得其占用空间减小。从而使得无人机机场的停放面积和设备总体尺寸减小。
附图说明
图1为本发明的结构示意图。
图2为本发明的无人机初始停放状态的俯视图。
图3为本发明的无人机浆叶收拢状态图。
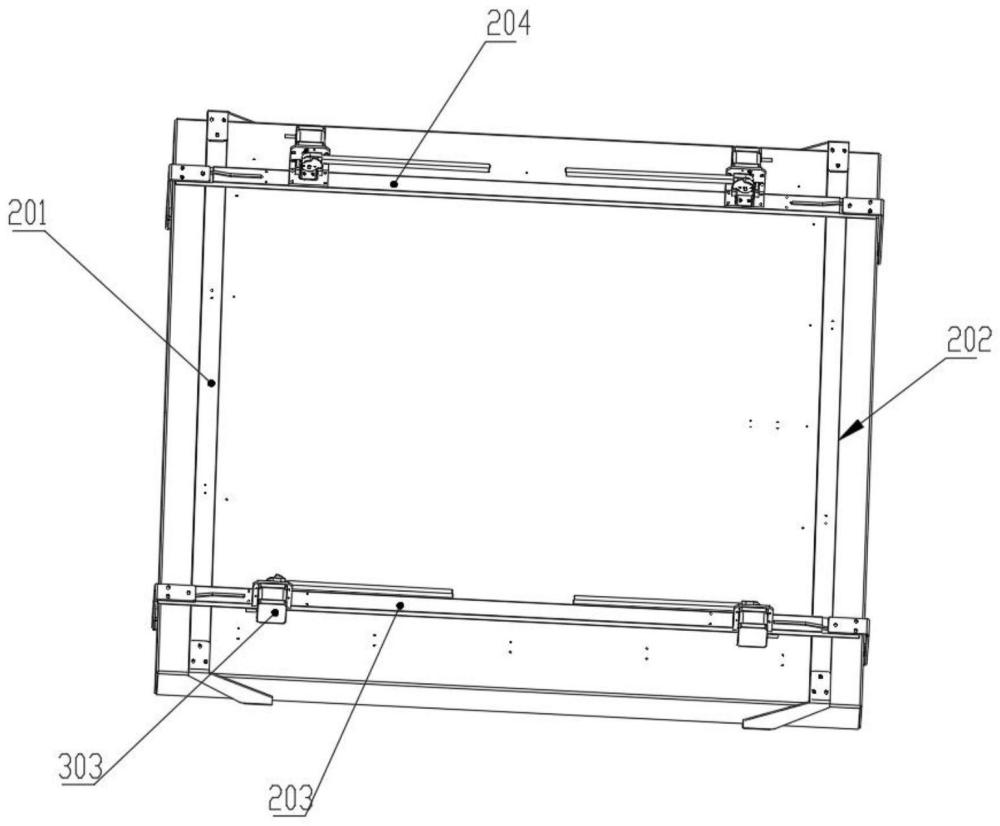
图4为本发明平台的后视图。
图5为本发明的侧视图。
图6为本发明转桨机构的结构示意图。
图7为本发明转桨机构的仰视图。
图8为本发明第一轴安片的结构示意图。
图9为本发明第二轴安片的结构示意图。
附图说明:1、平台;2、归中装置;201、第一机械臂;202、第二机械臂;203、第三机械臂;204、第四机械臂;205、驱动电机;206、锥形齿轮;3、转桨机构;301、第一拨杆件;302、第二拨杆件;303、旋转模块;304、转动片;305、固定座;306、安装板;307、机械限位开关;308、第一轴安装片;309、第一碳杆;310、第一工件;311、第二工件;312、第一凹槽;313、第二凹槽;314、插接部;315、第二轴安装片;316、第二碳杆;317、第三工件;318、第四工件;319、第三凹槽;320、开口;321、夹紧部;322、限位柱。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明实施例中可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明实施例中发生混淆,对于本领域公知的一些技术特征未进行描述。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
下面通过实施例,并结合附图对本方案做进一步具体说明。
一种无人机用收桨装置包括平台1、归中装置2和转桨机构3等组成。
具体的,归中装置2设置在平台1上,所述归中装置2用于将无人机推动至平台1的指定区域,转桨机构3设置在归中装置2上,用于无人机机桨的收桨。所述转桨机构3还包括固定座305,设置在第三机械臂203和第四机械臂204上,安装板306设置在固定座305上,机械限位开关307螺接在安装板306的两侧,旋转模块303安装在固定座305上,所述安装板306呈“U”型,设置在所述旋转模块303转动端的第一拨杆件301和第二拨杆件302,设置在所述第一拨杆件301和第二拨杆件302之间的扭簧,所述第一拨杆件301和第二拨杆件302能够旋转接触无人机浆叶推动浆叶收拢状态,设置在所述旋转模块303的转动轴上的螺接在所述第二拨杆件302上的转动片304,所述转桨机构3复位时,所述第一拨杆件301和第二拨杆件302呈重合平行状态,所述固定座305上设有限位柱322,所述限位柱322用于限制第一拨杆件301转动的最大角度。所述转动片304设置设计成扇形。具体的,通过旋转模块303的工作,带动着第一拨杆件301和第二拨杆件302的转动,为了减少空间的利用率,转桨机构3不工作时设计为与平台1的表面平行状态,减少了转桨机构3的空间利用率,
所述旋转模块采用旋转电机或者推杆机构;
所述推杆机构用于将第一拨杆件和第二拨杆件推送至预设的位置;
具体的,所述归中装置2包括第一机械臂201、第二机械臂202、第三机械臂203和第四机械
所述第一机械臂201与第二机械臂202相互平行,所述第三机械臂203与所述第四机械臂204相互平行;
所述第一机械臂201和第二机械臂202位于所述第三机械臂203和第四机械臂204的下方;
所述第一机械臂201、第二机械臂202、第三机械臂203和第四机械臂204的两端分别设有锥形齿轮206,所述锥形齿轮206与所述锥形齿轮206啮合;进一步的实现了所述第一机械臂201、第二机械臂202、第三机械臂203和第四机械臂204联动。同时所述第一机械臂201、第二机械臂202、第三机械臂203和第四机械臂204周向交替布设围城无人机放置区域;所述平台1的底部安装有驱动电机205,所述驱动电机205的转动端通过皮带与所述第一机械臂201连接;通过一个驱动电机205驱动四个机械臂做相对运动,减少了制作成本,所述驱动电机205驱动所述第一机械臂201和第二机械臂202与第三机械臂203和第四机械臂204相对运动,进而推动着无人机至设定的区域内。
作为一个优选案例,所述转桨机构3分别设置在第三机械臂203和第四机械臂204上;所述第三机械臂203和第四机械臂204上分别设两组转桨机构3;两组所述转桨机构3相对布置,能够将无人机的浆叶进行收拢。
具体的,所述第一拨杆件301和第二拨杆件302结构类似,所述第一拨杆件301包括第一轴安装片308,设置在所述第一轴安装片308上的第一碳杆309;所述第一轴安装片308包括第一工件310和第二工件311,所述第一工件310设为圆型,所述第二工件311设置在第一工件310上;所述第一工件310上设有第一凹槽312和第二凹槽313;所述第二工件311上设有插接部314;所述插接部314与所述第一碳杆309的直径适配,通过第一凹槽312限制角度发生,所述第二拨杆件302包括第二轴安装片315,设置在所述第二轴安装片315上的第二碳杆316;所述第二轴安装片315包括第三工件317,与所述第三工件317连接的第四工件318;所述第三工件317上设有第三凹槽319和开口320,所述第四工件318上设有通孔,所述通孔与所述第二碳杆316适配;与所述通孔垂直处设有夹紧部321,夹紧部321与所述通孔贯穿,通过螺栓拧紧,防止了第一碳杆309和第二碳杆316的松动,提高第一碳杆309和第二碳的稳定性。
作为一个优选案例,一种无人机用收桨装置的收桨方法,包括如下步骤;
包括如下步骤;
步骤1、无人机停在平台上;
步骤2、归中装置启动作业,驱动电机启动,进而第一机械臂和第二机械臂与第三机械臂和第四机械臂相互联动,向着相互的方向运动,将无人机推送至指定的位置;
步骤3、无人机归中后,归中装置复位至起始位置,然后转桨机构开启工作;
步骤4、旋转模块启动,带动着第一拨杆件和第二拨杆件沿着旋转模块的轴向转动,当第一拨杆件转动限位柱时,第一拨杆件停止转动,第二拨杆件继续主动通过第一拨杆件和第二拨杆件拨动浆叶,将无人机叶片均收拢至指定的区域。
具体的,第二拨杆件302的长度短与所述第一拨杆件301的长度,避免了无人机的机臂的发生。
工作原理:通过在归中装置2上安装了转桨机构3,该结构适用于桨叶朝下安装且桨叶是2个浆片能绕其固定点单独自由转动的,通过转桨机构3将无人机的浆叶收拢至指定的区域内,大幅减少了无人机的占用空间,若浆叶向上安装的需要改变结构;但收浆的方法一样,先同时旋转第一拨杆件301和第二拨杆件302通过拨杆件摆动桨叶旋转,与此同时第一拨杆件301和第二拨杆件302通过相应结构张开成一定的夹角。且第一拨杆件301和第二拨杆件302分别置于2个浆片一侧。随后归中杆再次进行归中操作。桨叶将被第一拨杆件301和第二拨杆件302的横向运动的作用下自动收拢到内侧。使得其占用空间减小。从而使得无人机机场的停放面积和设备总体尺寸减小。通过第一拨杆件301和第二拨杆件302直接的扭簧和限位柱322,使其第一碳杆309和第二碳杆316重合,使用的时候打开成估计的角度。
具体的,第二轴安装片上设置了螺纹孔,通过螺丝(图中未显示)凸起的部分,与所述第一凹槽进行配合,且所述第二轴安装片通过螺丝固定在所述旋转模块的输出轴上,实现同步转动,第一轴安装片与旋转模块的输出轴滑动连接,工作时,第一拨杆件的角度,通过限位柱和与安装在所述第二轴安装片上的螺丝(图中未显示)在第一凹槽内进行配合,进而将第一拨杆件角度固定在一定的角度范围内,同时防止了浆叶反向推动第一拨杆件和第二拨杆件。
具体的,如图1所示,在收桨前,无人机停靠在平台1上的位置是随意的,不会停靠在指定的区域,只能靠着归中装置2进行将无人机推送至指定的区域,沿着相对方向进行归中,之后转桨机构3沿着桨叶停放的位置均会在如图3所示的桨叶位置上最终达到收浆的目的。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
- 一种防水卷材用收卷方法及收卷装置
- 一种织布机的收料装置及其收料方法
- 一种无人机用螺旋桨调节装置
- 用于无人机螺旋桨拉力测试的装置及其方法
- 一种无人机自动收桨装置及收桨方法
- 一种无人机自动收桨装置及收桨方法