体感模拟器
文献发布时间:2023-06-19 18:53:06
技术领域
本发明涉及一种体感模拟器,尤指一种结构简单并能模拟多种体感的体感模拟器。
背景技术
一般的体感模拟器通过控制座椅的活动位置,让使用者产生移动的体感,以及配合视觉的模拟,让使用者有身历其境的体验。常见的史都华运动平台就是一种体感模拟平台。虽然史都华运动平台可以模拟出各种运动,但需要六组伸缩杆相互配合,不仅控制技术较为困难,设置成本也较一般的体感运动平台高。
一般来说,现有的体感模拟器具有下列缺点:
一、结构复杂:
根据目前的体感模拟技术,每一个模拟运动需要通过多个致动器被实现。因此,由多个致动器所形成的体感模拟器的结构较为复杂。
二、水平旋转角度不足:
以结构复杂的史都华运动平台为例,由于伸缩杆模拟的水平旋转角度固定,只能提供瞬间水平旋转的体感(yaw),水平旋转的角度范围有限,导致yaw方向的体感效果不足。
三、体感模拟器简化后的体感变化度不足:
在成本因素的考量下,减少致动器的数量可简化体感模拟器的结构,以降低成本及复杂度。但减少致动器后的体感模拟器只能提供有限的体感变化,无法模拟出真实的体感,导致体感变化度不足。
因此,如何制造出结构简单却具有高变化度的体感模拟器成为一亟待解决的问题。
发明内容
本发明提供了一种体感模拟器,以解决上述问题。
为实现上述目的,本发明采用的技术方案是:
一种体感模拟器,其特征在于,包含有:
一基板;
一活动平台,设置在该基板上,可动地连接于该基板;
一第一致动器,设置在该活动平台上,可动地连接于该活动平台;
一基座,具有在一长度方向上延伸的一基座主体以及在一宽度方向上延伸的一基座延伸表面,其中该第一致动器可动地连接于该基座延伸表面;
一第二致动器,可动地设置在该基座上;以及
一承载平台,可动地连接于该第二致动器,其中通过该基座与设置在该基座上的该第二致动器的连接关系,该第一致动器执行该承载平台相对于该活动平台的一左右活动,该第二致动器执行该承载平台相对于该活动平台的一前后活动。
所述的体感模拟器,其中,还包含有:
一支撑组件,设置在该活动平台上,连接于该活动平台及该基座主体之间,其中该支撑组件包含有:
一第一支撑杆,设置在该活动平台上,具有枢接于该活动平台的一端及固定连接于该基座主体的另一端;以及
一第二支撑杆,设置在该活动平台上,具有枢接于该活动平台地一端及固定连接于该基座主体的另一端,其中该第一支撑杆及该第二支撑杆分别设置在该基座延伸表面的相对两侧。
所述的体感模拟器,其中,该第一致动器包含有:
一基本部,设置在该活动平台上,该基本部的一底端可动地连接于该活动平台;以及
一延伸部,该延伸部的一底端连接于该基本部的一顶端,以及该延伸部的一顶端可动地连接于该基座延伸表面,其中根据该基本部的一控制,该延伸部伸长或缩短,以执行该左右活动。
所述的体感模拟器,其中,该第一支撑杆及该第二支撑杆于该活动平台的枢接处由一第一旋转轴所贯穿,当该第一致动器的该延伸部伸长或缩短时,该基座及该承载平台以该第一旋转轴为基准执行该左右活动。
所述的体感模拟器,其中,该第二致动器包含有:
一马达,用于执行一圆周运动;以及
一转换组件,设置在该基座上,可动地连接于该马达及该承载平台之间,其中该转换组件包含有:
一线性运动件,可动地连接于该马达,转换该马达的该圆周运动为沿着该基座的长度方向的一线性运动,以执行该承载平台的该前后活动。
所述的体感模拟器,其中,该转换组件还包含有:
一拉杆,可动地连接于该线性运动件及该承载平台,用于根据该线性运动,执行该承载平台的该前后活动。
所述的体感模拟器,其中,该线性运动件包含有:
一螺杆,设置在该基座上,连接于该马达;以及
一滑块,设置在该螺杆上,用于根据该马达的该圆周运动,在该螺杆上执行该线性运动。
所述的体感模拟器,其中,根据一第一关节,该滑块可动地连接于该拉杆的一端,以及根据一第二关节,该拉杆的一另一端可动地连接于该承载平台,使当该滑块在该螺杆上执行该线性运动时,该承载平台以一第二旋转轴为基准执行该前后活动。
所述的体感模拟器,其中,还包含有:
一连接组件,设置在该基座及该承载平台之间,其中该连接组件包含有:
一上平台,固定连接于该基座下方;
一下平台,相对该上平台而设置;
一延伸件,固定连接于该上平台与该下平台之间;
一旋转组件,通过一轴承结构可旋转地设置在该下平台下方而形成该第二旋转轴;以及
一连接件,设置在该承载平台与该旋转组件之间,并以该第二旋转轴为基准执行一旋转。
所述的体感模拟器,其中,该活动平台以垂直于该活动平台的一旋转轴为基准执行一转动,以及该承载平台的一中心与该活动平台的旋转轴对齐。
所述的体感模拟器,其中,还包含有:
复数个阻挡器,设置在该活动平台上,用于控制该左右活动的一活动范围;以及
复数个第一缓冲器,设置在该基座的两侧,用于当该第一致动器执行该左右活动时,缓冲该基座及该复数个阻挡器间的至少一撞击。
所述的体感模拟器,其中,还包含有:
复数个第二缓冲器,设置在该基座延伸表面,用于当该第二致动器执行该前后活动时,缓冲该基座延伸表面及该承载平台间的至少一撞击。
所述的体感模拟器,其中,该基板及该活动平台各自具有一彼此相对齐的结合接口,该活动平台通过该结合接口可拆卸地与该第一制动器及该支撑组件连接。
所述的体感模拟器,其中,该活动平台可拆卸地设置在该基板上,当该活动平台拆卸时,该基板通过其结合接口可拆卸地与该第一制动器及该支撑组件连接。
与现有技术相比较,本发明具有的有益效果是:本发明可以模拟出各种体感运动。相较一般史都华运动平台,本发明的结构简单,设置成本较低,操作方式也更为容易。此外,复数个阻挡器及复数个缓冲器提高体感模拟器的安全性,使用者可有更舒适的体验。
附图说明
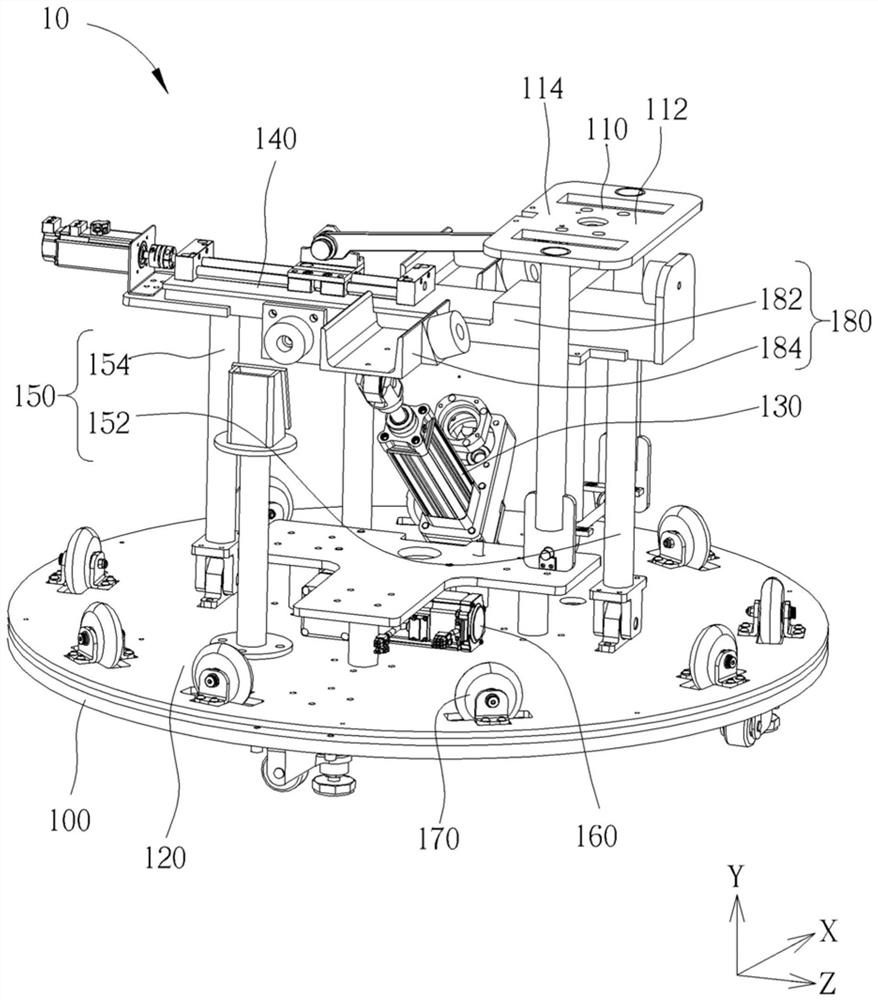
图1为本发明实施例一体感模拟器的示意图。
图2为本发明实施例一体感模拟器的示意图。
图3为本发明实施例一体感模拟器的示意图。
图4为本发明实施例一体感模拟器的示意图。
图5为本发明实施例一体感模拟器的示意图。
图6为本发明实施例一体感模拟器的示意图。
图7A、图7B、图7C分别为本发明实施例一体感模拟器的连杆机构带动承载平台左右活动的示意图。
图8为本发明实施例一体感模拟器的示意图。
图9为本发明实施例一体感模拟器的示意图。
图10为本发明实施例一体感模拟器的示意图。
图11为本发明实施例一体感模拟器的示意图。
图12、图13分别为本发明实施例一体感模拟器的基板示意图及活动平台的示意图。
附图标记说明:10、40、50、80、90、101、111-体感模拟器;100-基板;110-承载平台;112-前端;114-后端;120-活动平台;130-第一致动器;140-第二致动器;150-支撑组件;160-驱动组件;170、1020-转轮;180-基座;182-基座主体;184-基座延伸表面;200-基本部;220-延伸部;240-第一旋转轴;30-第一关节;32-第二关节;310、910-马达;320-转换组件;322-线性运动件;324-拉杆;326-螺杆;328-滑块;400-连接组件;402-延伸件;404-旋转轴;406-连接件;408-上平台;410-下平台;420-第二旋转轴;500、920、1010-阻挡器;510-第一缓冲器;520-第二缓冲器;700-连杆机构;710-第一连杆;720-第二连杆;800-皮带传动组件;912-齿轮及皮带;914-横杆;930-缓冲器;1000-减速机马达;1200-转轮接口;1202-脚轮接口;1204-减速机结合接口;1206-第一致动器接口;1208-支撑组件接口。
具体实施方式
图1、图2及图3为本发明实施例一体感模拟器10的示意图。在图1、图2及图3中,X方向轴、Y方向轴及Z方向轴彼此互相垂直。该体感模拟器10包含有一基板100、一承载平台110、一活动平台120、一第一致动器130、一基座180以及一第二致动器140。凭借复数个水平调整部件调整该基板100的水平,该基板100被设置在水平面(X方向轴及Z方向轴所形成的平面)上。该活动平台120设置在该基板100上,可动地连接于该基板100。该承载平台110设置在该活动平台120上方,以及与该活动平台120彼此间隔。该承载平台110包含有设置在该承载平台110的一载体。在一实施例中,该载体为一张椅子,但不以此为限。在一实施例中,该承载平台110包含有一前端112以及一后端114。当使用者乘坐该载体时,该使用者面朝该前端112的方向,以及背朝该后端114的方向。该第一致动器130(例如电动缸)设置在该活动平台120上,可动地连接于(例如枢接于)该活动平台120。该基座180具有在一长度方向上延伸的一基座主体182以及在一宽度方向上延伸的一基座延伸表面184,其中该第一致动器130可动地连接于该基座延伸表面184。该第二致动器140(例如螺杆滑台)可动地设置在该基座180上该承载平台110可动地连接于该第二致动器140,其中该第一致动器130通过与该基座180以及设置在该基座180上的该第二致动器140的连接关系执行该承载平台110相对于该活动平台120的一左右活动,该第二致动器140执行该承载平台110相对于该活动平台的一前后活动。在一实施例中,该承载平台110的该左右活动为左倾、右倾、左移及/或右移,以及该承载平台110的该前后活动为前倾、后倾、前移及/或后移,但不限于此。
在一实施例中,该体感模拟器10另包含有一支撑组件150、一驱动组件160及复数个转轮170。该支撑组件150设置在该活动平台120上,连接于该活动平台120及该基座主体182之间。该支撑组件150包含有一第一支撑杆152及一第二支撑杆154。该第一支撑杆152设置在该活动平台120上,具有枢接于该活动平台120的一端及固定连接于该基座主体182的另一端。该第二支撑杆154设置在该活动平台上,具有枢接于该活动平台120的一端及固定连接于该基座主体182的另一端。该第一支撑杆152及该第二支撑杆154分别设置在该基座延伸表面184的相对两侧。该驱动组件160设置在该基板100上(例如该基板100的中心),用于驱动该活动平台120相对于该基板100的一旋转(顺时针旋转或逆时针旋转)。该复数个转轮170设置在该活动平台120上,用于辅助(执行)该活动平台120的该旋转。该活动平台120的该旋转可带动设置于其上的该承载平台110、该第一致动器130及该第二致动器140旋转。因此,该驱动组件160以及该复数个转轮170可提供乘坐在该载体的使用者偏摆(yaw)的体感。需注意的是,该活动平台120的旋转角度不被整体的结构限制,与一般的史都华运动平台相比,可提供更真实的360度旋转体感。
在图2中,该第一致动器130包含有一基本部200及一延伸部220。该基本部200设置在该活动平台120上。该基本部200的一底端可动地连接于(例如枢接于)该活动平台120。该延伸部220的一底端连接于该基本部200的一顶端,以及该延伸部220的一顶端可动地连接于该基座延伸表面184。根据该基本部200的一控制,该延伸部220伸长或缩短,以执行该承载平台110的该左右活动。在一实施例中,该第一支撑杆152与该第二支撑杆154于该活动平台120的枢接处由一第一旋转轴240所贯穿,当该第一致动器130的该延伸部220伸长或缩短时,该基座180及该承载平台110以该第一旋转轴240为基准执行该承载平台110的该左右活动。举例来说,当该延伸部220伸长时,根据该第一旋转轴240,该第二致动器140及该承载平台110向X方向轴及/或Y方向轴的方向活动,使乘坐在该载体的使用者会向左活动(例如向左倾及/或向左移)。举例来说,当该延伸部220缩短时,根据该第一旋转轴240,设置于该基座180上的该第二致动器140及该承载平台110向X方向轴及/或Y方向轴的反方向活动,使乘坐在该载体的使用者会向右活动(例如向右倾及/或向右移)。因此,该承载平台110的该左右活动可提供乘坐在该载体的使用者翻滚(roll)的体感。
在一实施例中,该第一致动器130包含有一马达及一连杆机构。该马达用于控制该承载平台110的该左右活动。该连杆机构可动地连接于该马达及该承载平台110。根据该马达的该控制,该连杆机构可执行该承载平台110的该左右活动。换言之,该连杆机构可取代背景技术中需通过另一第一致动器(例如电动缸)控制该承载平台110的该左右活动,可减少多个第一致动器(例如电动缸)之间计算的复杂度。有关该连杆机构执行该承载平台110的该左右活动的实施例请参考图7A、图7B、图7C。
在图3中,该第二致动器140包含有一马达310以及一转换组件320。该马达310用于执行一圆周运动,以控制该承载平台110的该前后活动。该转换组件320设置在该基座300上,可动地连接于该马达310及该承载平台110之间。该转换组件320包含有一线性运动件322及一拉杆324。该线性运动件322可动地连接于该马达310,转换该马达310的该圆周运动为沿着该基座300的长度方向的一线性运动,以执行该承载平台110的该前后活动。该拉杆324可动地(可滑动地)连接于该线性运动件322及该承载平台110,用于根据该线性运动,执行该承载平台110的该前后活动。
在一实施例中,该线性运动件322包含有一螺杆326及一滑块328。该螺杆326设置在该基座300上,连接于该马达310。该滑块328设置在该螺杆326上,用于根据该马达310的该圆周运动,在该螺杆326上执行该线性运动。该拉杆324可动地连接于(例如枢接于)该滑块328及该承载平台110。根据该滑块328的该线性运动,该第二致动器134执行该承载平台110的该前后活动。
在一实施例中,根据一第一关节30,该滑块328可动地连接于(例如枢接于)该拉杆324的一端。在一实施例中,根据一第二关节32,该拉杆324的一另一端可动地连接于(例如枢接于)该承载平台110。当该滑块328在该螺杆326上执行该线性运动时,该承载平台110以一第二旋转轴为基准执行该承载平台110的该前后活动。举例来说,当该滑块328在该螺杆326上向Z方向轴的方向滑动时,根据该第一关节30及该第二关节32,该承载平台110向Z方向轴及/或Y方向轴的方向活动,使乘坐在该载体的使用者会向前活动(例如向前倾及/或向前移)。举例来说,当该滑块328在该螺杆326上向Z方向轴的反方向滑动时,根据该第一关节30及该第二关节32,该承载平台110向Z方向轴及/或Y方向轴的反方向活动,使乘坐在该载体的使用者会向后活动(例如向后倾及/或向后移)。因此,该承载平台110的该前后活动可提供乘坐在该载体的使用者俯仰(pitch)或前进后退(sway)的体感。
在一实施例中,该第二致动器140包含有该马达310及一皮带传动组件。该皮带传动组件可动地连接于该马达310及该承载平台110,转换该马达310的该圆周运动为该线性运动,以执行该承载平台110的该前后活动。有关该马达310及该皮带传动组件执行该承载平台110的该前后活动的实施例请参考图8。
图4为本发明实施例一体感模拟器40的示意图。在图4中,X方向轴、Y方向轴及Z方向轴彼此互相垂直。该体感模拟器40包含有一基板100、一承载平台110、一活动平台120、一第一致动器130、一基座180、一第二致动器140以及一连接组件400。该体感模拟器40可应用于图1的该体感模拟器10。该基板100、该承载平台110、该活动平台120、该第一致动器130、该基座180以及该第二致动器140的实施例可参考图1、图2及图3的实施例,在此不赘述。该连接组件400设置在该基座180及该承载平台110之间。该连接组件400包含有一上平台408、一下平台410、一延伸件402、一旋转组件404及一连接件406。该上平台408固定连接于该基座180下方。该下平台410相对于该上平台408而设置。该延伸件402固定连接于该上平台408及该下平台410之间该旋转组件404通过一轴承结构可旋转地设置在该下平台410下方。该旋转组件404在X方向轴及Z方向轴所形成的平面上的投影相对于该活动平台而固定。也就是说,当活动平台120执行该旋转以实现偏摆(yaw)的体感时,该旋转组件404也会一起旋转或转动。该连接件406设置在(固定在)该承载平台110与该旋转组件404之间,并以该第二旋转轴420为基准执行一旋转。在一实施例中,该活动平台120以垂直于该活动平台120的一旋转轴为基准执行一转动,以及该承载平台110的一中心与该活动平台120的旋转轴对齐。
图5及图6为本发明实施例一体感模拟器50的示意图。在图5及图6中,X方向轴、Y方向轴及Z方向轴彼此互相垂直。该体感模拟器50包含有一基板100、一承载平台110、一活动平台120、一第一致动器130、一基座180、一第二致动器140、复数个阻挡器500(例如失效止挡结构)、复数个第一缓冲器(bumper)510以及复数个第二缓冲器520。该体感模拟器50可应用于图1的该体感模拟器10。该基板100、该承载平台110、该活动平台120、该第一致动器130、该基座180以及该第二致动器140的实施例可参考图1、图2及图3的实施例,在此不赘述。
在图5中,该复数个阻挡器500设置在该活动平台120上,用于控制(限制)该承载平台110的该左右活动的一活动范围。该复数个第一缓冲器510设置在该基座180的两侧。当该第一致动器130执行该承载平台110的该左右活动时,该复数个第一缓冲器510缓冲该基座180及该复数个阻挡器500间的至少一撞击。举例来说,当该基座180及该承载平台110向X方向轴的方向活动时,该基座180会撞击图4中的左侧阻挡器,以及图5中的左侧第一缓冲器缓冲该基座180及左侧阻挡器间的一撞击,使该承载平台110向左活动的范围受到控制。举例来说,当该基座180及该承载平台110向X方向轴的反方向活动时,该基座180会撞击图5中的右侧阻挡器,以及图5中的右侧第一缓冲器缓冲该基座180及右侧阻挡器间的一撞击,使该承载平台110向右活动的范围受到控制。因此,该复数个阻挡器500控制了该承载平台110的活动范围,以提高该体感模拟器50的安全性。该复数个第一缓冲器510提供缓冲的功能,使乘坐在该载体的使用者有较舒适的体验。
在图6中,该复数个第二缓冲器520设置在该基座延伸表面184。当该第二致动器140执行该承载平台110的该前后活动时,缓冲该基座延伸表面184及该承载平台110间的至少一撞击。在一实施例中,当该承载平台110向Z方向轴的方向活动时,该承载平台110会撞击该第二致动器140,以及图6中的右侧第二缓冲器缓冲该第二致动器140及该承载平台110间的一撞击,使该承载平台110向前活动的范围受到控制。在一实施例中,当该承载平台110向Z方向轴的反方向活动时,该承载平台110会撞击该第二致动器140,以及图5中的左侧两个第二缓冲器缓冲该第二致动器140及该承载平台110间的撞击,使该承载平台110向后活动的范围受到控制。因此,该复数个第二缓冲器520提供缓冲的功能,使乘坐在该载体的使用者有较舒适的体验。
图7A、图7B、图7C为本发明实施例一体感模拟器的连杆机构700带动承载平台左右活动的示意图。通过该连杆机构700延长或缩短,该承载平台110可相对应地左倾或右倾。举例来说,当该连杆机构700维持一长度(例如原长度)时,第一连杆710与第二连杆720之间具有一第一夹角A,此时该承载平台110无左倾或右倾的活动(如图7B)。当该承载平台110欲向右倾斜时,该第一连杆710与该第二连杆720之间具有小于该第一夹角A的一第二夹角B,此时该连杆机构700缩短该长度,该承载平台110可被该连杆机构700带动向右倾斜(如图7C)。当该承载平台110欲向左倾斜时,该第一连杆710与该第二连杆720之间具有大于该第一夹角A的一第三夹角C,该连杆机构700伸长该长度,该承载平台110可被该连杆机构700带动向左倾斜(如图7A)。因此,该连杆机构700提供带动该承载平台110的一左右活动,以取代背景技术中需通过另一第一致动器(例如电动缸)控制该承载平台110的该左右活动,可减少多个第一致动器(例如电动缸)之间计算的复杂度。
图8为本发明实施例一体感模拟器80的示意图。该体感模拟器80包含有一承载平台110、一第一致动器130、马达310及皮带传动组件800。在体感模拟器80中,该皮带传动组件800可动地连接于该马达310及该承载平台110(例如该承载平台110的一旋转轴810),转换该马达310的该圆周运动为该线性运动,以执行该承载平台110的该前后活动。也就是说,该马达310及该皮带传动组件800提供带动该承载平台110的一前后活动,可取代图3中的体感模拟器10的该螺杆326及该滑块328提供乘坐在该载体的使用者俯仰的体感。
图9为本发明实施例一体感模拟器90的示意图。在图9,X方向轴、Y方向轴及Z方向轴彼此互相垂直,X方向轴为穿入纸面的方向故未绘示。该体感模拟器90包含有一基板100、一承载平台110、一活动平台120、一第一致动器130、一第二致动器140、一马达910、一齿轮及皮带912、一横杆914、复数个阻挡器920、复数个缓冲器930。该承载平台110的一中心(例如结构中心)与该活动平台120的一中心(例如旋转中心)的一连线垂直于该活动平台120。换言之,该承载平台110的中心对齐该活动平台120的中心,使承载平台110在前后倾时翻覆的机率降低。该马达910设置于该承载平台110的下方。与体感模拟器10的马达310相比,该马达910在XZ平面上的投影不会突出该活动平台120的最大圆径。该齿轮及皮带912可用来驱动该马达910的运作,配合该承载平台110的负载需求,该齿轮及皮带912可在维持马达910的规格条件下使扭力放大。该横杆914设置在该承载平台110的下方。
在图9中,该体感模拟器90的该复数个阻挡器920及该复数个缓冲器930用来控制(限制)该承载平台110的该前后活动的一活动范围。该复数个阻挡器920设置在该基座主体182上,以及在该基座延伸表面184的两侧向上延伸,从而控制(限制)该承载平台110的该前后活动的一活动范围。该复数个缓冲器930设置在该复数个阻挡器920上,用以缓冲碰撞力度。该复数个缓冲器930可为缓冲泡棉,但不限于此。当该第一致动器130执行该承载平台110的该前后活动的一前倾角度或一后倾角度过大时,该承载平台110下方的该横杆914撞击该复数个阻挡器920,该复数个缓冲器930缓冲该横杆914及该复数个阻挡器920间的至少一撞击。举例来说,当该承载平台110向Z方向轴的方向活动(即承载平台110的一后倾)时,该承载平台110下方的该横杆914会撞击图9中的复数个阻挡器920的右侧阻挡器上的复数个缓冲器930的右侧缓冲器阻挡器,以及图9中的复数个缓冲器930的右侧缓冲器缓冲该横杆914及右侧阻挡器间的一撞击,使该承载平台110向后活动的范围受到控制并缓冲碰撞力度。当该承载平台110向Z方向轴的反方向活动(即该承载平台110的一前倾)时,该承载平台110下方的该横杆914会撞击图9中的复数个阻挡器920的左侧阻挡器的复数个缓冲器930的左侧缓冲器上的阻挡器,以及图9中的复数个缓冲器930的左侧缓冲器缓冲该横杆914及左侧阻挡器间的一撞击,使该承载平台110向前活动的范围受到控制并缓冲碰撞力度。因此,该复数个阻挡器920及该复数个缓冲器930控制了该承载平台110的该前倾及该后倾的一活动范围,也可以在该第一致动器130(例如电动缸)失效时做为一安全机制,以避免该承载承台110无限制地前倾或后倾造成危险,以提高该体感模拟器90的安全性。该复数个阻挡器920及该复数个缓冲器930提供缓冲的功能,使乘坐在该载体的使用者有较舒适的体验。
图10为本发明实施例一体感模拟器101的示意图。在图10,X方向轴、Y方向轴及Z方向轴彼此互相垂直,Z方向轴为穿入纸面的方向故未绘示。该体感模拟器101包含有一基板100、一承载平台110、一活动平台120、一第一致动器130、一第二致动器140、一减速机马达1000、复数个阻挡器1010、复数个转轮1020。该减速机马达1000设置在该基板100上并用来驱动该活动平台120相对于该基板100的一旋转。该复数个阻挡器1010用来控制(限制)该承载平台110的该左右活动的一活动范围,控制承载平台110的左右活动的活动范围的方法可参照上述体感模拟器50的复数个阻挡器500的说明,在此不赘述。该体感模拟器101的该复数个阻挡器1010与体感模拟器50的复数个阻挡器500的形状不同。该复数个阻挡器1010的形状设计为三角形,可减少被承载平台110撞击的过程中变形的可能。该复数个转轮1020设置于该基板100及该活动平台120之间。该复数个转轮1020可为复数个滚珠形式的滚轮,与体感模拟器10中的复数个转轮170相比,使用滚珠形式的滚轮可以用较小的体积达到相同的支撑力,因此可以有效减少活动平台120与基板110之间的距离,降低体感模拟器50整体的稳定性。在体感模拟器101以该减速机马达1000驱动该活动平台120旋转的情形下,复数个转轮1020仅需辅助支撑活动平台120,而无须驱动该活动平台120的旋转。
在一实施例中,该活动平台120可拆卸地设置在该基板100上。该基板100及该活动平台120各自具有彼此相对齐的结合接口,该结合接口均可用于可拆卸地与该第一制动器130及该支撑组件150连接。也就是说,由于基板100与活动平台120各自具有彼此相对齐的结合接口,体感模拟器可移除活动平台120及复数个转轮170后,以基板100与该第一制动器130及该支撑组件150连接,能够依照需求提供更弹性的使用变化。
图11为本发明实施例一体感模拟器111的示意图。在图11,X方向轴、Y方向轴及Z方向轴彼此互相垂直,X方向轴为穿入纸面的方向故未绘示。该体感模拟器111包含有一基板100、一承载平台110、一第一致动器130、一第二致动器140及一支撑组件150。由于该基板100具有与活动平台120相对齐的结合接口,即便将该活动平台120及该复数个转轮170从体感模拟器111移除,体感模拟器111仍可将第一致动器130及支撑组件150直接设置在基板100上。
图12、图13分别为本发明实施例一体感模拟器的一基板100及一活动平台120的示意图。该基板100的一外径(例如1000mm)大于该活动平台120的一外径(例如950mm)。该基板100具有用来设置复数个转轮的复数个转轮接口1200,该活动平台120无转轮接口。该基板100具有用来设置复数个脚轮的复数个脚轮接口1202,该活动平台120无脚轮接口。该基板具有用来设置减速机马达的减速机结合接口1204,该活动平台120无减速机结合接口1204。该基板100与该活动平台120具有彼此对齐的第一致动器接口1206及支撑组件接口1208,该第一致动器接口1206用来设置该第一致动器130,该支撑组件接口1208用来设置该支撑组件150。
根据以上所述,本发明提供一种体感模拟器。体感模拟器的一个致动器执行一种活动,例如第一致动器执行承载平台的左右活动(翻转的体感运动),以及第二致动器执行承载平台的前后活动(俯仰的体感运动)。本发明可以模拟出各种体感运动。相较一般史都华运动平台,本发明的结构简单,设置成本较低,操作方式也更为容易。此外,复数个阻挡器及复数个缓冲器提高体感模拟器的安全性,使用者可有更舒适的体验。
以上说明对本发明而言只是说明性的,而非限制性的,本领域普通技术人员理解,在不脱离权利要求所限定的精神和范围的情况下,可作出许多修改、变化或等效,但都将落入本发明的保护范围之内。
- 一种踏感模拟器及带有该踏感模拟器的电动助力器
- 一种VR眼镜踏云飞行体感模拟器