一种用于细胞培养的智能生产线
文献发布时间:2023-06-19 18:53:06
技术领域
本发明涉及细胞培养技术领域,尤其涉及一种用于细胞培养的智能生产线。
背景技术
细胞培养(cell culture)是指在体外模拟体内环境(无菌、适宜温度、酸碱度和一定营养条件等),使之生存、生长、繁殖并维持主要结构和功能的一种方法。细胞培养也叫细胞克隆技术,在生物学中的正规名词为细胞培养技术。
细胞培养的基本原理:细胞传代(生存空间和营养不足,长得太密,代谢废物太多,要清洗,同时也要分离出一部分细胞,要加入新的培养液),换液(生存空间和营养剩余,但是代谢废物太多,要清洗和加入新鲜培养基),冻存(太多了,先存起来,液氮里面里就是低温,保存能量,活得久),复苏(解冻,恢复成长的能力,恢复生长。)
在培育过程中,需要对细胞进行样本提取,将样本放入到检测标本上,在检测标本加入不同的检测液发生反应,随后将检测标本移走,用于检测该样本是否符合培育标准等;现有的细胞培养的智能生产线在对上述操作时大部分都是采用多个设备同时进行,相互信号交互来共同完成;不仅所需的成本较高,而且多台设备需要占用较大的空间,不利于其他设备的摆放。
发明内容
本发明的目的在于针对现有技术的不足提供一种用于细胞培养的智能生产线。
为实现上述目的,本发明的技术方案如下:
一种用于细胞培养的智能生产线,包括检测平台,检测平台包括平台架,平台架上布置有可在X、Y轴方向运动的检测驱动座,检测驱动座安装有纵向布置的第一检测立柱、第二检测立柱和第三检测立柱;所述第一检测立柱滑动安装有可在Z轴方向往复运动的第一检测固定座,第一检测固定座安装有可开合的夹持器组件;所述第二检测立柱滑动安装有可在Z轴方向往复运动的第二检测固定座,第二检测固定座安装有单注射器;第二检测立柱底部安装有单注液组件;所述第三检测立柱滑动安装有多个多注射器;第三检测立柱底部安装有多注液组件,多注液组件包括多个等距并排布置的注液头。
进一步的:平台架安装有X轴运动组件以及安装在X轴运动组件的Y轴运动组件,其中Y轴运动组件沿着X轴运动组件在X轴方向往复运动,检测驱动座沿着Y轴运动组件在Y轴方向往复运动。
进一步的:X轴运动组件包括一对平行间隔布置地安装在平台架的第一驱动丝杆件,Y轴运动组件包括设置于两个第一驱动丝杆件之间的Y轴驱动座,Y轴驱动座两端分别安装有与第一驱动丝杆件传动配合的第一螺套座;Y轴驱动座沿长度方向安装有第二驱动丝杆件,检测驱动座安装有与第二驱动丝杆件传动配合的第二螺套座;
所述平台架还安装有间隔平行于第一驱动丝杆件的X轴支撑座,Y轴驱动座两端分别安装有端连接板,端连接板安装有分别与X轴支撑座的顶面和底面滚动配合的第一滚动轮;所述检测驱动座安装有分别与Y轴驱动座的顶面和底面滚动配合的第二滚动轮。
进一步的:X轴支撑座的顶面和底面分别沿长度方向成型有供第一滚动轮嵌入滚动的第一滚动槽,Y轴驱动座的顶面和底面分别沿长度方向成型有供第二滚动轮嵌入滚动的第二滚动槽;
所述第一螺套座安装于端连接板,第二驱动丝杆件可转动地安装在两个端连接板之间;所述检测驱动座包括一对位于Y轴驱动座长度方向两侧的侧检测板,两个侧检测板之间设置有多个横连接柱,所述第二螺套座安装于其中一个横连接柱,第二滚动轮分别可转动地安装在两个侧检测板内侧壁。
进一步的:第一检测立柱沿长度方向安装有第一升降丝杆件,检测驱动座安装有第一升降螺套座,第一升降螺套座与可转动的第一升降丝杆件传动配合,第一检测立柱可在Z轴方向往复运动;第一检测立柱沿长度方向成型有供第一检测固定座滑动安装的第一导向导轨。
进一步的:夹持器组件包括纵向安装在第一检测固定座的第一伺服舵机,第一伺服舵机的驱动端可在Z轴方向转动,第一伺服舵机的驱动端安装有横向布置的第二伺服舵机,第二伺服舵机具有两个在Y轴方向转动的驱动端,第二伺服舵机的驱动端同时连接有摆动架,摆动架安装有两个横向布置的第三伺服舵机,第三伺服舵机具有两个在X轴方向转动的驱动端,每个第三伺服舵机通过两个驱动端安装有夹块,两个夹块可同时绕着第三伺服舵机的驱动端转动做可开合的夹持运动。
进一步的:第二检测立柱沿长度方向安装有第二升降丝杆件,检测驱动座安装有第二升降螺套座,第二升降螺套座与可转动的第二升降丝杆件传动配合,第二检测立柱可在Z轴方向往复运动;第二检测立柱沿长度方向成型有供第二检测固定座滑动安装的第二导向导轨;
所述第二检测固定座安装有可升降运动的注射升降座以及安装在注射升降座的单注射压杆,单注射压杆下方固定安装有与所述单注射压杆同轴对齐的单注射筒。
进一步的:第三检测立柱沿长度方向安装有第三升降丝杆件,检测驱动座安装有第三升降螺套座,第三升降螺套座与可转动的第三升降丝杆件传动配合,第三检测立柱可在Z轴方向往复运动。
进一步的:多注射器包括滑动安装在第三检测立柱的注射升降板以及可调节高度地安装在第三检测立柱的底部支撑座,注射升降板上等距安装有多个注射压杆,底部支撑座等距安装有多个与上方的注射压杆同轴对齐的注射筒;
所述多注液组件包括安装于第三检测立柱底部的接头固定座,多个注液头等距安装于接头固定座。
进一步的:多注射器还包括安装在第三检测立柱的电机固定座,电机固定座上安装有纵向布置的步进马达,步进马达的驱动端安装有挠性联轴器,挠性联轴器安装有第三转动丝杆件,注射升降板安装有与第三转动丝杆件传动配合的防背隙螺母块;所述注射升降板背部可转动地安装有分别与第三检测立柱的左侧壁和右侧壁滚动配合的第三滚动轮,第三检测立柱的左侧壁以及右侧壁分别沿竖直方向成型有供第三滚动轮嵌入滑动的第三滚动槽。
本发明的有益效果:在一个检测平台上,第一检测立柱、第二检测立柱和第三检测立柱可同时在X轴和Y轴方向往复移动,且可分别在Z轴方向往复移动;可通过安装有夹持器组件的第一检测立柱可升降地将检测盒从一处夹持至检测平台上;同时第三检测立柱根据需求对应地升降工作;多注射器可对整排的细胞试剂管的细胞提取一部分;检测盒放入至检测平台上,随后多注射器的注射器将提取的细胞依次放入至检测盒内,多注液组件的注液头可将不同的混合药剂依次与检测盒的细胞混合反应,从而对细胞进行检测是否达标;
整个过程都只需采用检测平台上的三个检测立柱对应地工作同时进行,无需多台设备同时交互进行,大大降低了设备的占用空间,检测驱动座具有搬运、提取和移液为一体的检测功能,其检测效率极高,适用于大批量细胞培育的智能生产线。
附图说明
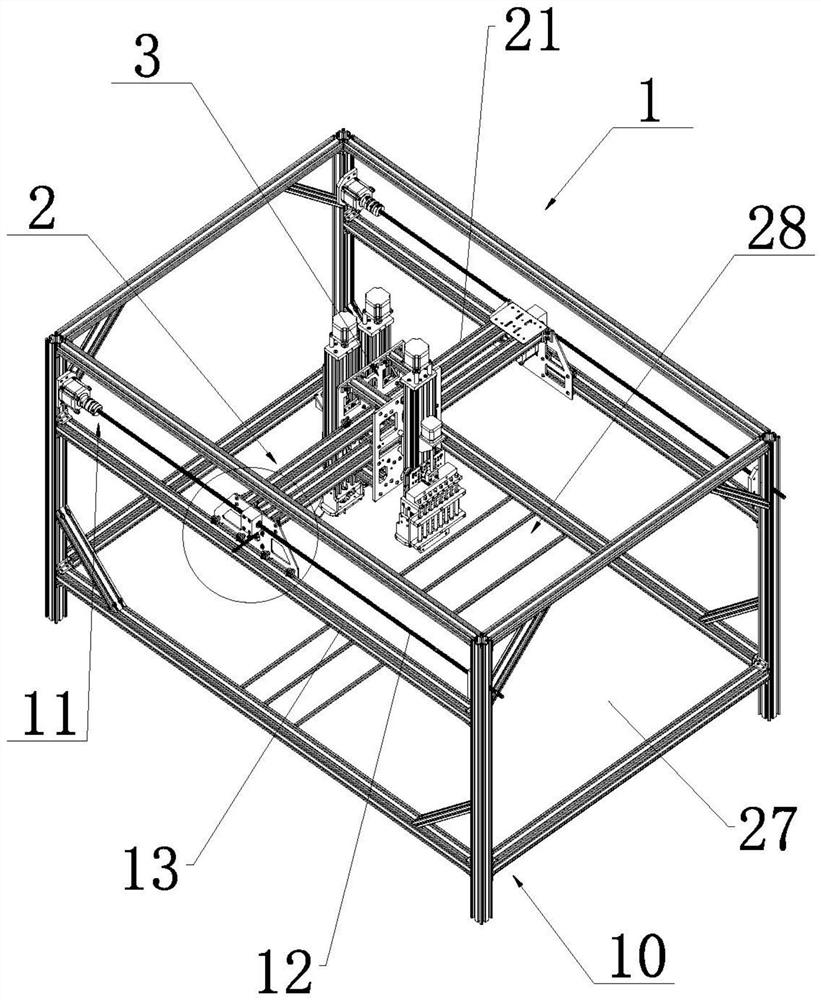
图1为细胞培养的检测平台的结构示意图。
图2为图1中的局部放大结构示意图,包含Y轴运动组件与Z轴运动组件相连接的结构。
图3为检测驱动座分别与检测立柱相连接的结构示意图。
图4为第一检测立柱的结构示意图。
图5为第二检测立柱的结构示意图。
图6为第三检测立柱的结构示意图。
图7为检测驱动座与Y轴运动组件相连接的结构示意图。
附图标记包括:
1-检测平台、
10-平台架、11-X轴运动组件、12-第一驱动丝杆件、13-X轴支撑座、2-Y轴运动组件、21-Y轴驱动座、22-第二驱动丝杆件、23-端连接板、24-第一螺套座、25-第一滚动轮、26-第一滚动槽、27-定位板、
28-定位区域、
3-检测驱动座、
31-侧检测板、32-横连接柱、33-第二滚动轮、34-第二螺套座、
35-第二滚动槽、
4-第一检测立柱、
41-第一升降丝杆件、42-第一升降螺套座、43-第一检测固定座、
44-第一导向导轨、
5-夹持器组件、
51-第一伺服舵机、52-第二伺服舵机、53-第三伺服舵机、54-摆动架、55-夹块、
6-第二检测立柱、
61-第二升降丝杆件、62-第二升降螺套座、63-第二检测固定座、
64-第二导向导轨、
7-单注射器、
71-竖直导轨、72-注射升降座、73-第一注射压杆、74-第一注射筒、
75-步进马达、76-第一注液丝杆件、77-第一注液头、
8-第三检测立柱、
81-第三升降丝杆件、82-第三升降螺套座、83-多注液组件、
84-接头固定座、85-第二注液头、
9-多注射器、
90-电机固定座、91-挠性联轴器、92-第三转动丝杆件、93-注射升降板、94-防背隙螺母块、95-第二注射压杆、96-底部支撑座、97-第二注射筒、98-第三滚动轮、99-第三滚动槽。
具体实施方式
以下结合附图细胞培养的智能生产线对本发明进行详细的描述。
如图1-7所示,一种用于细胞培养的智能生产线,包括细胞盒输送平台、检测平台1和后输送平台,其中检测平台1包括平台架10以及安装在平台架10底部的定位板27,定位板27上设置有多个用于定位检测盒的定位区域28,平台架10上布置有可在X、Y轴方向运动的检测驱动座3;平台架10安装有X轴运动组件11以及安装在X轴运动组件11的Y轴运动组件2,其中Y轴运动组件2沿着X轴运动组件11在X轴方向往复运动,检测驱动座3沿着Y轴运动组件2在Y轴方向往复运动。
X轴运动组件11包括一对平行间隔布置地安装在平台架10顶部的第一驱动丝杆件12,第一驱动丝杆件12两端分别安装有轴承座,其中一个轴承座传动连接有电机,并由电机驱动第一驱动丝杆件12转动。Y轴运动组件2包括设置于两个第一驱动丝杆件12之间的Y轴驱动座21,Y轴驱动座21两端分别安装有与第一驱动丝杆件12传动配合的第一螺套座24;第一驱动丝杆转动时,Y轴驱动座21可沿着第一驱动丝杆件12的长度方向往复滑动,即在X轴方向运动。
Y轴驱动座21沿长度方向安装有第二驱动丝杆件22,第二驱动丝杆件22由电机驱动做转动运动,检测驱动座3安装有与第二驱动丝杆件22传动配合的第二螺套座34;当第二驱动丝杆件22转动时,检测驱动座3可沿着第二驱动丝杆件22的长度方向往复滑动,即在Y轴方向运动。
具体的,为提高滑动稳定性,平台架10还安装有间隔平行于第一驱动丝杆件12的X轴支撑座13,Y轴驱动座21两端分别安装有端连接板23,第一螺套座24安装于端连接板23,通过第一螺套座24与第一驱动丝杆件12的螺纹配合,使得安装有端连接板23的Y轴驱动座21在X轴方向运动。
端连接板23安装有分别与X轴支撑座13的顶面和底面滚动配合的第一滚动轮25,第一滚动轮25分别滚动地夹住X轴支撑座13顶面和底面,使得Y轴驱动座21在运动时更加平顺,且不会从平台架10掉落,进一步的,X轴支撑座13的顶面和底面分别沿长度方向成型有供第一滚动轮25嵌入滚动的第一滚动槽26,通过该第一滚动槽26对第一滚动轮25的运动方向进行限位,进一步提高Y轴驱动座21的运动精度,保证后续细胞的检测精度。
端连接板23安装有用于对第二驱动丝杆件22进行安装的轴承座,第二驱动丝杆件22可转动地安装在两个端连接板23之间。检测驱动座3包括一对位于Y轴驱动座21长度方向两侧的侧检测板31,两个侧检测板31之间设置有多个横连接柱32,所述第二螺套座34安装于其中一个横连接柱32,两个侧检测板31内侧壁分别可转动地安装有第二滚动轮33,第二滚动轮33分别与Y轴驱动座21的顶面和底面滚动配合,并对滚动地夹住Y轴驱动座21的顶面和底面,使得检测驱动座3在运动时更加平顺,且不会从平台架10掉落。
Y轴驱动座21的顶面和底面分别沿长度方向成型有供第二滚动轮33嵌入滚动的第二滚动槽35;通过该第二滚动槽35对第二滚动轮33的运动方向进行限位,进一步提高检测驱动座3的运动精度,配合Y轴驱动座21的运动精度,保证后续细胞的检测精度。
检测驱动座3安装有纵向布置的第一检测立柱4、第二检测立柱6和第三检测立柱8,其中第一检测立柱4和第二检测立柱6分别可升降地安装在同一个侧检测板31上。
第一检测立柱4沿长度方向安装有第一升降丝杆件41,第一检测立柱4顶部安装有与第一升降丝杆件41通过联轴器传动连接的驱动电机,检测驱动座3固定地安装有第一升降螺套座42,第一升降螺套座42与可转动的第一升降丝杆件41传动配合,使得第一检测立柱4可在Z轴方向往复运动;即升降运动。使得第一检测立柱4可在竖直方向上具有较高的精度进行运动。第一检测立柱4滑动安装有可在Z轴方向往复运动的第一检测固定座43,第一检测立柱4沿长度方向成型有供第一检测固定座43滑动安装的第一导向导轨44,第一检测固定座43插入螺栓抵住第一导向导轨44对第一检测固定座43的安装高度进行调节安装,根据试管高度以及检测盒高度等进行相应地调节至所需的安装高度。
第一检测固定座43安装有可开合地对检测盒夹持的夹持器组件5,夹持器组件5包括纵向安装在第一检测固定座43的第一伺服舵机51,第一伺服舵机51的驱动端可在Z轴方向转动,第一伺服舵机51的驱动端安装有横向布置的第二伺服舵机52,第二伺服舵机52两端同轴具有在Y轴方向转动的驱动端,第二伺服舵机52的驱动端同时连接有摆动架54,摆动架54可绕着第二伺服舵机52的驱动端摆动,摆动架54安装有两个横向布置的第三伺服舵机53,第三伺服舵机53具有两个在X轴方向转动的驱动端,每个第三伺服舵机53通过两个驱动端安装有夹块55,两个夹块55可同时绕着第三伺服舵机53的驱动端转动做可开合的夹持运动,两个第三伺服舵机53同时相反地工作,使得两个夹块55同时靠近或远离,从而可对检测盒进行夹持。配合第一伺服舵机51和第二伺服舵机52可调节夹持方向,可对多个方向和角度的检测盒进行夹持,相较于传统的气缸,一方面体积较小,重量也较低,输出的精度较高;另一方面,无需布置气动系统,省去一定的材料,减少后期维修的成本以及减少空间占用。
伺服舵机是具有输出轴的小设备。该轴可以通过发送伺服编码信号被定位到特定的角度位置。只要在输入线中存在的编码信号,伺服将保持所述轴的角位置。作为编码信号的变化,所述轴变化的角度位置;通过伺服电机进行精确的位置控制或者输出较高的扭矩。
第二检测立柱6沿长度方向安装有第二升降丝杆件61,检测驱动座3固定安装有第二升降螺套座62,第二升降螺套座62与可转动的第二升降丝杆件61传动配合,第二检测立柱6可在Z轴方向往复运动;第二检测立柱6顶部安装有与第二升降丝杆件61通过联轴器传动连接的驱动电机,驱动第二升降丝杆件61转动时,第二升降螺套座62与可转动的第二升降丝杆件61传动配合,使得第二检测立柱6可在Z轴方向往复运动;即升降运动。使得第二检测立柱6可在竖直方向上具有较高的精度进行运动。
所述第二检测立柱6滑动安装有可在Z轴方向往复运动的第二检测固定座63,第二检测立柱6沿长度方向成型有供第二检测固定座63滑动安装的第二导向导轨64,第二检测固定座63插入螺栓抵住第二导向导轨64对第二检测固定座63的安装高度进行调节安装,根据试管高度以及检测盒高度等进行相应地调节至所需的安装高度。
第二检测立柱6底部通过固定座安装有单注液组件,单注液组件为单个第一注液头77,第一注液头77连通气动系统,可对液体吸入和滴出。第二检测固定座63安装有单注射器7。第二检测固定座63沿长度成型有竖直导轨71,通过竖直导轨71滑动安装有注射升降座72,注射升降座72安装有一根第一注射压杆73,竖直导轨71底部安装有一个与第一注射压杆73同轴对齐的第一注射筒74,第二检测固定座63上通过固定架安装有步进马达75,步进马达75的驱动端通过联轴器安装有可转动的第一注液丝杆件76,注射升降座72开设有与第一注液丝杆件76螺纹配合的内螺纹孔,第一注液丝杆件76与注射升降座72的内螺纹孔螺纹配合,从而可转动地带动安装有第一注射压杆73的注射升降座72在Z轴方向运动,可对第一注射筒74进行吸液和排液。
第二检测立柱6的运动通过单注射器7对单个试剂管的进行吸取部分液体,以及通过单注液组件对一种液体检测物质进行吸取。
第三检测立柱8沿长度方向安装有第三升降丝杆件81,检测驱动座3安装有第三升降螺套座82,第三升降螺套座82与可转动的第三升降丝杆件81传动配合,第三检测立柱8可在Z轴方向往复运动。第三检测立柱8顶部安装有与第三升降丝杆件81通过联轴器传动连接的驱动电机,驱动第三升降丝杆件81转动时,第三升降螺套座82与可转动的第三升降丝杆件81传动配合,使得第三检测立柱8可在Z轴方向往复运动;即升降运动。使得第三检测立柱8可在竖直方向上具有较高的精度进行运动。
第三检测立柱8底部安装有多注液组件83,多注液组件83包括包括安装于第三检测立柱8底部的接头固定座84,多个第二注液头85等距并排布置安装在接头固定座84上,第二注液头85连通气动系统,可对液体吸入和滴出,通过多注液组件83对多种液体检测物质进行依次吸取,在同一检测格内加入不同的检测物质进行反应,得出不同的检测结果。
第三检测立柱8还滑动安装有多注射器9,多注射器9包括安装在第三检测立柱8的电机固定座90,电机固定座90上安装有纵向布置的步进马达75,步进马达75的驱动端安装有挠性联轴器91,挠性联轴器91安装有第三转动丝杆件92。
多注射器9还包括滑动安装在第三检测立柱8的注射升降板93,注射升降板93安装有与第三转动丝杆件92传动配合的防背隙螺母块94,注射升降板93通过防背隙螺母块94与第三转动丝杆件92螺纹传动配合实现注射升降板93的升降。
注射升降板93上等距安装有多个第二注射压杆95,第三检测立柱8的可调节高度地安装有位于注射升降板93下方的底部支撑座96,底部支撑座96等距安装有多个与上方的第二注射压杆95同轴对齐的第二注射筒97;由步进马达75带动第三转动丝杆件92转动,与注射升降板93的防背隙螺母块94螺纹配合,安装有第二注射压杆95的注射升降板93升降运动地带动第二注射压杆95下压,对第二注射筒97内的细胞排出,上升时,可通过第二注射筒97形成负压将细胞样本吸入至筒内。
具体的,注射升降板93背部可转动地安装有分别与第三检测立柱8的左侧壁和右侧壁滚动配合的第三滚动轮98,第三检测立柱8的左侧壁以及右侧壁分别沿竖直方向成型有供第三滚动轮98嵌入滑动的第三滚动槽99,第三滚动轮98对第三检测立柱8的两侧壁进行滚动夹持,使得注射升降板93可在Z轴方向上精确地运动,带动第二注射压杆95准确同轴地在第二注射筒97内升降,实现对细胞的吸入和排出,较佳地对细胞进行移送。
在一个检测平台1上,第一检测立柱4、第二检测立柱6和第三检测立柱8可同时在X轴和Y轴方向往复移动,且可分别在Z轴方向往复移动;可通过安装有夹持器组件5的第一检测立柱4可升降地将检测盒从一处夹持至检测平台1的定位板27上,检测盒放入至检测平台1的定位板27上,检测盒具有多个供液体存放的检测区域。
同时细胞试剂管位于旁侧,试剂管与检测盒之间的间距恰好等于第一检测立柱4和第二检测立柱6之间的间距,恰好与多注射器9同轴对齐,第三检测立柱8根据需求对应地升降工作;多注射器9可对整排的细胞试剂管的细胞同时提取一部分,随后多注射器9的多注射器9将提取的细胞依次放入至检测盒的不同的检测区域内,多注液组件83的整排的第二注液头85可将不同的混合药剂依次与检测盒的细胞混合反应,从而对细胞进行检测是否达标。
其中一个实施例,对单个细胞试剂管的细胞进行检测时,只需第一检测立柱4和第二检测立柱6配合升降,第一检测立柱4的夹持器组件5将只有一个检测区域的检测盒夹持至检测平台1的定位板27上,同时第二检测立柱6的第一注液头77将旁侧的细胞试剂管吸取一部分细胞样本,随后检测盒夹持到检测平台1的定位板27上进行定位,第二检测立柱6上的细胞标本放入至检测盒内,随后第二检测立柱6的第一注射器将单份的检测物质放入到检测盒内与细胞标本混合反应,对该份标本进行检测。
整个过程都只需采用检测平台1的定位板27上的三个检测立柱对应地工作同时进行,无需多台设备同时交互进行,大大降低了设备的占用空间,检测驱动座3具有搬运、提取和移液为一体的检测功能,其检测效率极高,适用于大批量细胞培育的智能生产线;还可根据实际需求选择多样化工作。
此外,平台架10外围还设置有多轴机器人组成的机械手,活动范围广,运动路径较为灵活,该机械手的执行端安装有夹持夹具,夹持夹具由手指气缸的驱动下开合做开合运动,可对试剂管或者检测盒进行夹持,当夹持器组件5出现工作异常时,机械手可进行代替,对试剂管或者检测盒进行夹持,夹持后的试剂管或试剂盒移送至指定的位置进行放置定位,辅助细胞的检测、加液和注液,进一步提高设备的运动稳定性,保证设备的正常运作。
综上所述可知本发明乃具有以上所述的优良特性,得以令其在使用上,增进以往技术中所未有的效能而具有实用性,成为一极具实用价值的产品。
以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
- 一种用于智能自动化生产线中的装配夹具
- 一种适用于自动化设备的贴壁细胞培养容器
- 一种用于生物反应器的细胞培养床
- 一种用于生物医药生产的细胞培养装置
- 一种用于细胞免疫荧光和免疫化学研究的细胞培养板
- 一种用于细胞培养用多功能智能细胞培养皿
- 一种用于细胞培养用多功能智能细胞培养皿