一种格斗机器人
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及机器人领域,特别涉及一种格斗机器人。
背景技术
现有的格斗机器人在设计与对手的格斗机构时,只注重如何将对手破坏掉,而忽略了自身的防护与稳定,故而提出一种能够提高自身稳定性能的机器人来解决上述所提出的问题。
发明内容
针对上述问题,本发明提供一种格斗机器人,本发明通过本发明通过设置可交替上下滑动的滚轮与吸盘头,保证其移动性能的同时,提高了机器人在攻击时抗击退性能。
本发明所使用的技术方案是:一种格斗机器人,包括:底盘、滚轮支架、前轮、后轮、第一皮带轮、电机支架、第一电机、第二皮带轮、第一皮带、吸盘支架、吸盘座、吸盘头、第二电机、齿轮支架、齿轮轴、联轴器、齿轮、齿条、隔板、抽气泵支架、抽气泵、抽气软管、气缸、棍子支撑、辊子、第三电机、第三皮带轮、第二皮带、外壳;
所述底盘上安装有滚轮支架,所述滚轮支架能够在底盘上面升降滑动;所述前轮和后轮与所述滚轮支架滚动连接;所述皮带轮固定安装在后轮一端圆柱上,所述电机支架固定安装在滚轮支架上,电机支架上固定安装有第一电机;第一电机输出轴上固定安装有第二皮带轮;所述第一皮带安装在第一皮带轮与第二皮带轮上;
所述吸盘支架安装在所述底座上,吸盘支架能够在底座上面升降滑动;所述吸盘座固定安装在所述吸盘支架上,所述吸盘座与所述吸盘头固定连接;
所述第二电机与齿轮支架固定连接在所述底座上,所述齿轮轴与所述齿轮支架转动连接,所述联轴器与所述齿轮轴和所述电机输出轴固定连接;所述滚轮支架和所述吸盘支架上面均设有一个齿条,且两个齿条位于齿轮轴两侧并和齿轮轴啮合;
所述隔板固定安装在所述底座上,所述抽气泵支架与所述隔板固定连接,所述抽气泵支架上固定安装有抽气泵;所述抽气软管两端分别与所述吸盘头和所述抽气泵固定连接;
所述气缸与所述隔板固定连接,所述辊子支架安装在所述隔板上,所述辊子支架上设有滑槽,能够在所述隔板上的滑轨上滑动;所述气缸输出端与所述辊子支架固定连接;
进一步的,所述辊子与所述辊子支架转动连接,所述辊子上设有皮带槽;所述第三电机固定连接在所述辊子支架上,所述第三电机输出轴上固定安装有第三皮带轮,所述第二皮带安装在所述第三皮带轮和辊子上;
进一步的还包括外壳,所述外壳安装在所述底盘上,所述外壳设有辊子支架的通口;
进一步的,所述底盘设有特定的通孔,可通过所述吸盘头和所述滚轮;
进一步的,所述滚轮支架与所述吸盘支架设有特殊弯折结构。
由于本发明采用了上述技术方案,本发明具有以下优点:
1.本发明通过设置交替升降的滚轮与吸盘头,保证移动性能的同时,提高了攻击时自身的抗击退性能;
2.通过设置可前后滑动的辊子实现了机器人的灵活攻击能力;
3.全包围式的外壳提高了机器人的防护能力。
附图说明
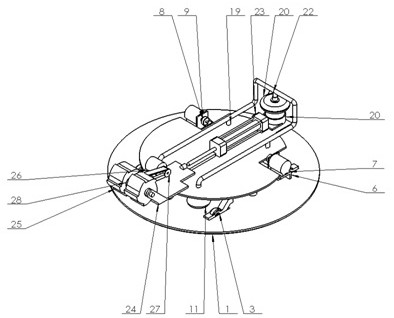
图1为本发明的整体装配图。
图2为内部安装示意图。
图3为齿条等安装示意图。
图4为吸盘头等安装示意图。
图5为后轮等安装示意图。
图6为隔板结构示意图。
图7为辊子结构示意图。
图8为外壳结构示意图。
附图标号:1-底盘、2-滚轮支架、3-前轮、4-后轮、5-第一皮带轮、6-电机支架、7-第一电机、8-第二皮带轮、9-第一皮带、10-吸盘支架、11-吸盘座、12-吸盘头、13-第二电机、14-齿轮支架、15-齿轮轴、16-联轴器、17-齿轮、18-齿条、19-隔板、20-抽气泵支架、21-抽气泵、22-抽气软管、23-气缸、24-棍子支撑、25-辊子、26-第三电机、27-第三皮带轮、28-第二皮带、29-外壳。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
实施例
如图1-图7所示,一种格斗机器人,包括:底盘1、滚轮支架2、前轮3、后轮4、第一皮带轮5、电机支架6、第一电机7、第二皮带轮8、第一皮带9、吸盘支架10、吸盘座11、吸盘头12、第二电机13、齿轮支架14、齿轮轴15、联轴器16、齿轮17、齿条18、隔板19、抽气泵支架20、抽气泵21、抽气软管22、气缸23、棍子支撑24、辊子25、第三电机26、第三皮带轮27、第二皮带28、外壳29;
所述底盘1上安装有滚轮支架2,所述滚轮支架2能够在底盘1上面升降滑动;所述前轮3和后轮4与所述滚轮支架2滚动连接;所述第一 皮带轮4固定安装在后轮4一端圆柱上,所述电机支架6固定安装在滚轮支架5上,电机支架6上固定安装有第一电机7;第一电机7输出轴上固定安装有第二皮带轮8;所述第一皮带9安装在第一皮带轮5与第二皮带轮8上;
所述吸盘支架10安装在所述底座1上,吸盘支架10能够在底座1上面升降滑动;所述吸盘座11固定安装在所述吸盘支架10上,所述吸盘座11与所述吸盘头12固定连接,吸盘座11能够支撑吸盘头12,提高吸附效果;
所述第二电机13与齿轮支架14固定连接在所述底座1上,所述齿轮轴15与所述齿轮支架14转动连接,所述联轴器16与所述齿轮轴15和所述第二电机13输出轴固定连接;所述滚轮支架2和所述吸盘支架10上面均设有一个齿条18,且两个齿条18位于齿轮轴15两侧并和齿轮轴15啮合,滚轮支架2与吸盘支架10上均安装有齿条17,与齿轮18配合,可使滚轮支架2与吸盘支架10相对运动,实现机器人移动和吸附地面的灵活转换;
所述隔板19固定安装在所述底座1上,所述抽气泵支架20与所述隔板19固定连接,所述抽气泵支架20上固定安装有抽气泵21;所述抽气软管22两端分别与所述吸盘头12和所述抽气泵21固定连接,通过抽气泵21控制吸盘头12的吸附力;
所述气缸23与所述隔板19固定连接,所述辊子支架24安装在所述隔板19上,所述辊子支架24上设有滑槽,能够在所述隔板19上的滑轨上滑动;所述气缸23输出端与所述辊子支架24固定连接;
本实施例的另一种实施方式中,所述辊子25与所述辊子支架24转动连接,所述辊子25上设有皮带槽;所述第三电机26固定连接在所述辊子支架24上,所述第三电机26输出轴上固定安装有第三皮带轮27,所述第二皮带28安装在所述第三皮带轮27和辊子25上;
本实施例的另一种实施方式中,还包括外壳29,所述外壳29安装在所述底盘1上,所述外壳09设有辊子支架24的通口,全包围式外壳29提高了防护性能,通孔可通过辊子支架24前后滑动,提高了攻击的灵活性;
本实施例的另一种实施方式中,所述底盘1设有特定的通孔,可通过所述吸盘头12和所述滚轮;
本实施例的另一种实施方式中,所述滚轮支架2与所述吸盘支架10设有特殊弯折结构,滚轮支架2与吸盘支架10上下相对升降过程中不会干涉。
本发明至少还包括以下优点:本发明在通过齿轮齿条副的配合,实现了吸盘头与滚轮的相对升降位移,使得机器人移动动作与吸附动作能够灵活转换;可向前推进的辊子支架装置能够实现灵活攻击。
- 格斗机器人U型可替换模块装置及含该装置的格斗机器人
- 格斗机器人及格斗机器人装置