一种活体鳗鱼全自动剖杀去杂装置及方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及水产加工装备领域,特别涉及一种活体鳗鱼全自动剖杀去杂装置及方法。
背景技术
近年来,市场对鳗鱼特别是烤鳗的需求量不断增大,导致鳗鱼饲养规模不断扩大,鳗鱼的剖杀加工量随之增加。人工剖杀鳗鱼的加工成本高且效率低下,急需研发鳗鱼剖杀的自动化设备。如专利(CN110800793A)公开了一种全自动鳗鱼剖杀装置,该装置由倒料框、进料管、传送皮带、剖背去骨组合刀片、第一滚轮和第二滚轮、刮内脏刀片、切头刀片、出料口、斜面工作台等组成,该装置涵盖了剖杀、去骨、去内脏和去头等加工全过程;但是,鳗鱼生性好动,该装置是采用人工辅助拨动鳗鱼,鳗鱼难以进入进料管,而且鳗鱼体表有黏液,十分光滑,无法仅靠双传送皮带和传送带张紧机构固定并传送鳗鱼,进而影响后续的剖杀去骨等步骤。
发明内容
本发明的目的在于克服现有技术中存在的缺点,提供一种活体鳗鱼全自动剖杀去杂装置及方法,可以准确固定鳗鱼,有效快捷地对鳗鱼进行剖杀、去杂,准确率高、效率高,降低人工成本。
本发明的目的通过下述技术方案实现:
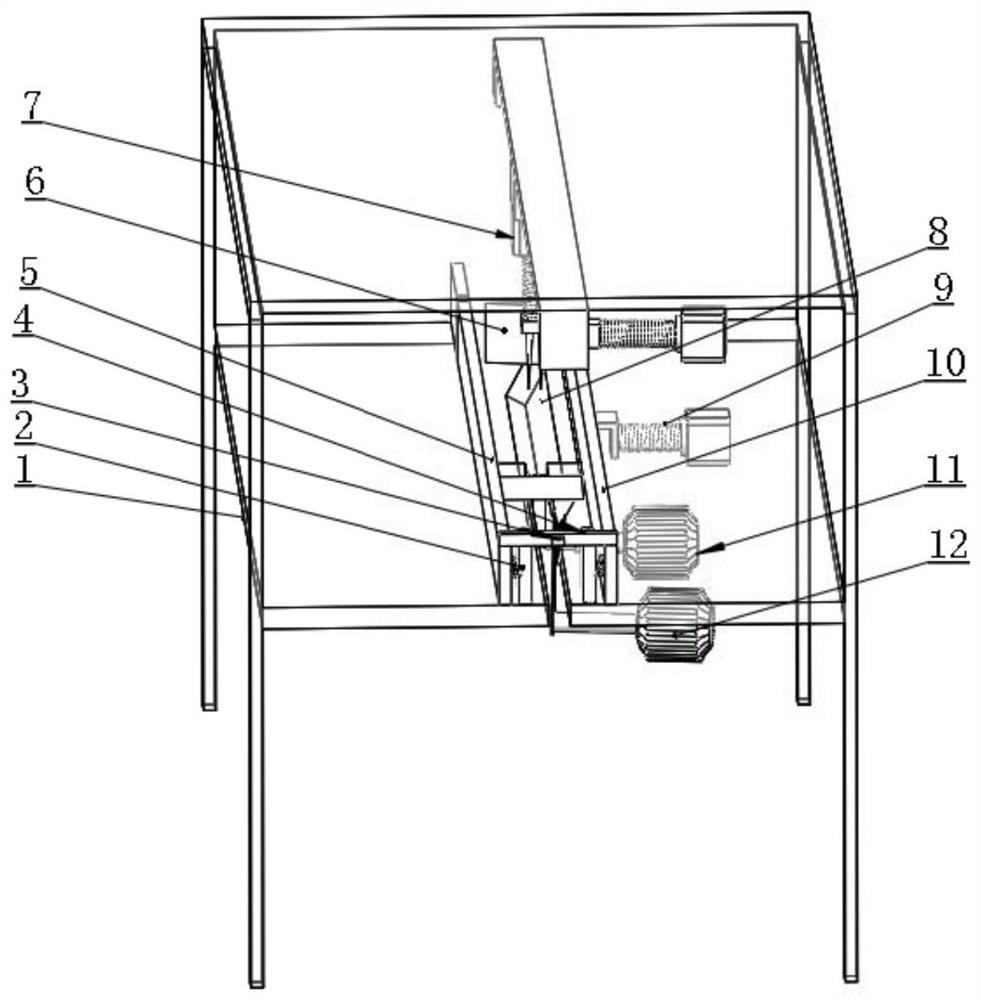
一种活体鳗鱼全自动剖杀去杂装置,包括工作台1、张紧部件2、带红外传感器的控制器3、横梁4、左挡板5、切头部件6、固定牵引头部部件7、右挡板10、去杂部件11和剖背去骨部件12;工作台1上设置有左挡板5和右挡板10,对称的张紧部件2分别固定连接在左挡板5和右挡板10上;左挡板5和右挡板10的顶部通过横梁4进行约束固定,横梁4上固定有带红外传感器的控制器3;固定牵引头部部件7固定在工作台1的顶部;剖背去骨部件12、去杂部件11、切头部件6依次固定在工作台1上。
所述活体鳗鱼全自动剖杀去杂装置还包括开关门部件9,位于去杂部件11和切头部件6的中间。
所述活体鳗鱼全自动剖杀去杂装置还包括鳗鱼掉落门8,所述鳗鱼掉落门8位于工作台1的后端,其与工作台1通过铰链连接。
所述固定牵引头部部件7、剖背去骨部件12、去杂部件11、开关门部件9、切头部件6由带红外传感器的控制器3来控制协调工作。
所述张紧部件2包括张紧弹簧模组21和张紧轮22;张紧弹簧模组21和张紧轮22固定连接,对称的两排张紧轮22通过张紧弹簧模组21分别固定连接在左挡板5和右挡板10上。张紧弹簧模组21具有收缩性,可以随鳗鱼的体型而改变间隙的宽度,起限位固定作用。所述张紧轮22的表面有橡胶物;所述橡胶物的厚度为3~5mm,橡胶物的表面有颗粒状突起,摩擦系数较大,对鳗鱼表皮有一定的附着力,从而有效夹紧鳗鱼,并且橡胶物具有一定的缓冲作用,能保护鳗鱼表皮不受损坏。
所述固定牵引头部部件7包括固定牵引头部同步带滑台模组71、固定牵引针模组72;固定牵引头部同步带滑台模组71固定在工作台1的顶部,固定牵引头部同步带滑台模组71上固定有固定牵引针模组72,固定牵引头部同步带滑台模组71用于带动固定牵引针模组72平移。
所述剖背去骨部件12包括剖背刀片121、去骨刀片122、剖背去骨旋转轴123和剖背去骨旋转电机124;剖背去骨旋转电机124固定在工作台1上,剖背去骨旋转电机124的剖背去骨旋转轴123与剖背刀片121相固定,去骨刀片122的一端与剖背刀片121固定连接并形成30~40度角度。
所述去杂部件11包括去杂旋转电机111、去杂旋转轴112和去杂刮板113;去杂旋转电机111固定在工作台1上,去杂旋转电机111的去杂旋转轴112与去杂刮板113相固定。
所述切头部件6包括切头电机61,切头电动推杆62、切头刀模组63;切头电机61固定在工作台1上,切头电机61的切头电动推杆62与切头刀模组63相固定。
所述开关门部件9包括开关门电机91、开关门电动推杆92、开关门挡板模组93,开关门电动推杆92与开关门挡板模组93相固定。
所述固定牵引针模组72包括固定牵引电机721、固定牵引电动推杆722、鳗鱼头部固定牵引针723;固定牵引电机721固定在固定牵引头部同步带滑台模组71上,固定牵引电机721的固定牵引电动推杆722的一端固定有2根鳗鱼头部固定牵引针723。所述固定牵引针723细长而小,一头尖锐,带有倒刺,插入鳗鱼头部后能有效防止脱落,两根固定牵引针723相距6~10mm。
一种活体鳗鱼全自动剖杀去杂方法,是采用上述活体鳗鱼全自动剖杀去杂装置,包括下述步骤:
(1)固定牵引工序:当鳗鱼腹部朝上,头部朝前插入张紧部件2中间的间隙时,由于张紧弹簧模组21具有收缩性,可以随鳗鱼的体型而改变间隙的宽度,对鳗鱼进行限位,避免鳗鱼头部发生偏移,同时张紧轮22表面有一层厚约3~5mm的橡胶物,橡胶物的表面有颗粒状突起,摩擦系数较大,对鳗鱼表皮有一定的附着力,从而有效夹紧鳗鱼;横梁4上的带红外传感器的控制器3检测到有鳗鱼插入张紧部件2中间的间隙中时,带红外传感器的控制器3识别该鳗鱼的头型比例和鱼头中线位置,控制固定牵引电机721启动,固定牵引电机721提供固定牵引电动推杆722带动鳗鱼头部固定牵引针723向下移动的推力,在向下移动的过程中,鳗鱼头部固定牵引针723的顶尖把鳗鱼头皮戳破并顺势向下移动,带红外传感器的控制器3通过反馈调节控制固定牵引电机721提供的推力力度,使鳗鱼头部固定牵引针723下降到一定程度后停止,插入鳗鱼头部深度约占其头部的1/2~3/4,两根鳗鱼头部固定牵引针723以鱼头中线为中心线左右对称。两排张紧部件2对鳗鱼头部进行位置限定,避免鱼头发生偏移,再配合力学对称的两根鳗鱼头部固定牵引针723,以鱼头中线为中心线,由上而下插入鳗鱼头部,上下左右四个方位全封闭,有效提高固定鳗鱼头部的牢固性;然后,带红外传感器的控制器3控制固定牵引头部同步带滑台模组71带动固定牵引针模组72平移;
(2)剖背去骨工序:带红外传感器的控制器3控制固定牵引头部同步带滑台模组71带动固定着鳗鱼头部的固定牵引针模组72平移,经过剖背去骨部件12上方时,带红外传感器的控制器3控制剖背去骨旋转电机124带动剖背去骨旋转轴123旋转,使剖背刀片121沿着鳗鱼移动方向旋转85~95度,剖背刀片121剖开鳗鱼背部,去骨刀片122剔除鳗鱼鱼骨,鳗鱼鱼骨从工作台1的间隙中掉落;
(3)去杂工序:带红外传感器的控制器3控制固定牵引头部同步带滑台模组71带动固定牵引针模组72继续平移经过去杂部件11上方时,带红外传感器的控制器3控制去杂旋转电机111带动去杂旋转轴112旋转,使去杂刮板沿着鳗鱼移动方向旋转40~50度,去杂刮板113刮除鳗鱼内脏,鳗鱼内脏从工作台1的间隙中掉落;
(4)去头工序:固定牵引针模组72平移经过切头部件6时,带红外传感器的控制器3控制切头电机61提供给切头电动推杆62推力,推动切头刀模组63向前移动,在移动的过程中,切头刀模组63将鳗鱼头部精确切开,鱼头和鱼身分开;
(5)收集工序:带红外传感器的控制器3控制固定牵引电机721,使固定牵引电动推杆722带动鳗鱼头部固定牵引针723向上移动,在向上移动的过程中,鳗鱼头部固定牵引针723的顶尖从鳗鱼头部抽离,带红外传感器的控制器3控制开关门电机91,使开关门电动推杆92带动挡板模组93往回移动,与工作台1通过铰链连接的鳗鱼掉落门8失去挡板模组93的抵挡作用后向下打开,鱼头和鱼身从间隙中掉落。
本发明的原理是:由于鳗鱼头型呈扁平状,侧面面积大,一般的扎针思路会从侧面着手,但由于鳗鱼头部侧面呈几何不规则形状,固定牵引针723从侧面插入鳗鱼头部容易因为鳗鱼头型的大小不一而无法准确插入头部侧面的几何中心,固定效果就会变差,影响后续的剖杀去杂步骤;因此,本发明采用两排张紧部件2对鳗鱼头部进行位置限定,从上往下插入两根固定牵引针723,鳗鱼头顶面积虽然小,但通过两排张紧部件2对鳗鱼头部进行位置限定,带红外传感器的控制器3提供控制信号,两根固定牵引针723相距6~10mm,以鱼头中线为中心线左右对称,由上而下插入鳗鱼头部,就能准确插中鳗鱼头部的几何中心。两根固定牵引针723准确插进鳗鱼头部后,带红外传感器的控制器3控制固定牵引头部部件7,带动鳗鱼依次经过剖背去骨部件12、去杂部件11和切头部件6,完成鳗鱼的剖杀去杂步骤。
本发明与现有技术相比具有如下优点和效果:
(1)本发明的装置,结构简单,制作和使用成本较低,可以模拟人工剖杀鳗鱼的工序,确保剖杀的准确度。
(2)本发明的装置,全程高度自动化,只需一人手持鳗鱼,让鳗鱼腹部朝上、鱼头朝前插入装置间隙中,便可得到剖杀去杂完毕的鳗鱼,降低劳动成本。
附图说明
图1为活体鳗鱼全自动剖杀去杂装置的结构示意图。
图2为活体鳗鱼全自动剖杀去杂装置的侧视剖面结构示意图。
图3为张紧部件的结构示意图。
图4为固定牵引头部部件的结构示意图。
图5为剖背去骨部件的结构示意图。
图6为去杂部件的结构示意图。
图7为切头部件的结构示意图。
图8为开关门部件的结构示意图。
图9为固定牵引针模组的结构示意图。
其中,1、工作台;2、张紧部件;3、带红外传感器的控制器;4、横梁;5、左挡板;6、切头部件;7、固定牵引头部部件;8、鳗鱼掉落门;9、开关门部件;10、右挡板;11、去杂部件;12、剖背去骨部件;21、张紧弹簧模组;22、张紧轮;61、切头电机;62、切头电动推杆;63、切头刀模组;71、固定牵引头部同步带滑台模组;72、固定牵引针模组;91、开关门电机;92、开关门电动推杆;93、开关门挡板模组;111、去杂旋转电机;112、去杂旋转轴;113、去杂刮板;121、剖背刀片;122、去骨刀片;123、剖背去骨旋转轴;124、剖背去骨旋转电机;721、固定牵引电机;722、固定牵引电动推杆;723、鳗鱼头部固定牵引针。
具体实施方式
为了便于理解本发明,下面将结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但是,不以任何形式限制本发明。应该指出的是,对本领域的技术人员来说,在不脱离本发明构思的前提下,本发明还可以做出若干变形和改进,这些都属于本发明的保护范围。
实施例1
本发明的活体鳗鱼全自动剖杀去杂装置,可用于剖杀加工活体鳗鱼,得到去骨、去内脏的加工过的鳗鱼,如图1、图2所示,包括工作台1、张紧部件2、带红外传感器的控制器3、横梁4、左挡板5、切头部件6、固定牵引头部部件7、鳗鱼掉落门8、开关门部件9、右挡板10、去杂部件11、剖背去骨部件12。工作台1上设置有左挡板5和右挡板10,对称的张紧部件2分别固定连接在左挡板5和右挡板10上;左挡板5和右挡板10的顶部通过横梁4进行约束固定,横梁4上固定有带红外传感器的控制器3;固定牵引头部部件7固定在工作台1的顶部;剖背去骨部件12、去杂部件11、切头部件6依次固定在工作台1上;开关门部件9位于去杂部件11和切头部件6的中间;鳗鱼掉落门8与工作台1通过铰链连接。
如图3所示,所述张紧部件2包括张紧弹簧模组21和张紧轮22;张紧弹簧模组21和张紧轮22固定连接,对称的两排张紧轮22通过张紧弹簧模组21分别固定连接在左挡板5和右挡板10上。如图4所示,所述固定牵引头部部件7包括固定牵引头部同步带滑台模组71、固定牵引针模组72;固定牵引头部同步带滑台模组71固定在工作台1的顶部,固定牵引头部同步带滑台模组71上固定有固定牵引针模组72,固定牵引头部同步带滑台模组71用于带动固定牵引针模组72平移。如图5所示,所述剖背去骨部件12包括剖背刀片121、去骨刀片122、剖背去骨旋转轴123和剖背去骨旋转电机124;剖背去骨旋转电机124固定在工作台1上,剖背去骨旋转电机124的剖背去骨旋转轴123与剖背刀片121相固定,去骨刀片122的一端与剖背刀片121固定连接,所成角度为30~40度。如图6所示,所述去杂部件11包括去杂旋转电机111、去杂旋转轴112和去杂刮板113;去杂旋转电机111固定在工作台1上,去杂旋转电机111的去杂旋转轴112与去杂刮板113相固定。如图7所示,所述切头部件6包括切头电机61,切头电动推杆62、切头刀模组63;切头电机61固定在工作台1上,切头电机61的切头电动推杆62与切头刀模组63相固定。如图8所示,所述开关门部件9包括开关门电机91、开关门电动推杆92、开关门挡板模组93,开关门电动推杆92与开关门挡板模组93相固定。如图9所示,所述固定牵引针模组72包括固定牵引电机721、固定牵引电动推杆722、鳗鱼头部固定牵引针723;固定牵引电机721固定在固定牵引头部同步带滑台模组71上,固定牵引电机721的固定牵引电动推杆722的一端固定有2根鳗鱼头部固定牵引针723。
活体鳗鱼全自动剖杀去杂装置在使用时,呈流水线生产作业,固定牵引头部部件7循环固定牵引鳗鱼。当鳗鱼腹部朝上,头部朝前插入张紧部件2中间的间隙时,张紧弹簧模组21具有收缩性,可以随鳗鱼的体型而改变间隙的宽度,起限位固定作用,同时张紧轮22表面有一层厚约3~5mm橡胶物,橡胶物的表面有颗粒状突起,摩擦系数较大,对鳗鱼表皮有一定的附着力,从而有效夹紧鳗鱼,并且橡胶物具有一定的缓冲作用,能保护鳗鱼表皮不受损坏。横梁4上的带红外传感器的控制器3检测到有鳗鱼插入张紧部件2中间的间隙中时,带红外传感器的控制器3识别该鳗鱼的头型比例和鱼头中线位置,控制固定牵引电机721启动,提供固定牵引电动推杆722带动鳗鱼头部固定牵引针723向下移动的推力,在向下移动的过程中,鳗鱼头部固定牵引针723的顶尖把鳗鱼头皮戳破并顺势向下移动,带红外传感器的控制器3通过反馈调节控制固定牵引电机721提供的推力力度,使鳗鱼头部固定牵引针723下降到一定程度后停止,插入鳗鱼鱼头部深度约占其头部的1/2~3/4,两根鳗鱼头部固定牵引针723以鱼头中线为中心线左右对称。两排张紧部件2对鳗鱼头部进行位置限定,避免鱼头发生偏移,再配合力学对称的两根鳗鱼头部固定牵引针723,以鱼头中线为中心线,由上而下插入鳗鱼头部,从而提高固定鳗鱼头部的牢固性。接着带红外传感器的控制器3控制固定牵引头部同步带滑台模组71带动固定牵引针模组72平移。当鳗鱼头部经过剖背刀片121上方时,带红外传感器的控制器3控制剖背去骨部件12工作,带红外传感器的控制器3控制剖背去骨旋转电机124,使剖背去骨旋转轴123沿着鳗鱼移动方向旋转85~95度,剖背刀片121剖开鳗鱼背部,去骨刀片122剔除鳗鱼鱼骨,鳗鱼鱼骨从工作台1的间隙中掉落。带红外传感器的控制器3控制固定牵引头部同步带滑台模组71带动固定牵引针模组72继续平移,当鳗鱼头部经过去杂刮板113上方时,去杂部件11工作,带红外传感器的控制器3控制去杂旋转电机111,使去杂旋转轴112沿着鳗鱼移动方向旋转40~50度,去杂刮板113刮除鳗鱼内脏,鳗鱼内脏从工作台1的间隙中掉落。当固定牵引头部部件7牵引鳗鱼头部经过切头刀模组63附近位置时,切头部件6工作,带红外传感器的控制器3控制切头电机61提供给切头电动推杆62推力,推动切头刀模组63前移,在移动的过程中,切头刀模组63将鳗鱼头部精确切开,鱼头和鱼身分开。固定牵引电机721提供给固定牵引电动推杆722推力,带动鳗鱼头部固定牵引针723向上移动,鳗鱼头部固定牵引针723从鳗鱼头部抽离,开关门电机91提供给开关门电动推杆92推力,带动挡板模组93往回移动,与工作台1通过铰链连接的鳗鱼掉落门8失去挡板模组93的抵挡作用后向下打开,鱼头和已去杂的鱼身从间隙中掉落,整个活体鳗鱼剖杀过程结束。
实施例2
活体鳗鱼全自动剖杀去杂装置的整条流水线可成对称增加,在工作台1上由原来的一条流水线变成两条,相应的剖杀装置对称排列,整个鳗鱼剖杀去杂工作效率可以变为原来的两倍,缩短了鳗鱼剖杀工作过程时间,有效应对大批量剖杀加工活体鳗鱼。
以上所述仅为本发明的实施例,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均为等效的置换方式,都包含在本发明的保护范围之内。