一种抓虾定向装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及虾类生产技术领域,尤其涉及一种抓虾定向装置。
背景技术
现今随着生活水平以及冷冻技术的提升,百姓的餐桌上频繁出现了虾的身影,且由于虾的味道鲜美,市场上对虾的需求量较大,但是,由于虾的体型特殊,自然摆放呈现侧躺的状态,且在后续的加工生产过程中,需要将虾进行有序、头尾定向、背腹朝向预设的位置进行上料,以便后续进行加工操作,现有技术由于无法对体型特殊的虾进行有序定向的上料,导致虾的自动化生产受到极大的阻碍,从而限制了市场供应的短缺。
发明内容
本发明的目的是提供有助于实现虾的抓取移动并实现定向上料,有助于实现虾的自动化生产的一种抓虾定向装置。
为了实现上述目的,本发明提供一种抓虾定向装置,包括第一边夹、第二边夹以及用于驱动所述第一边夹和所述第二边夹相对运动的边夹驱动机构,所述第一边夹面向所述第二边夹的一侧面形成有背向所述第二边夹方向凹陷的第一弧面,所述第二边夹面向所述第一边夹的一侧面形成有背向所述第一边夹方向凹陷的第二弧面,所述第一弧面的半径大于所述第二弧面的半径。
本技术方案进一步优选的,所述第一弧面和所述第二弧面的表面粗糙度不大于2μm。
本技术方案进一步优选的,所述第一弧面与所述第二弧面之间的最短距离的范围为0mm-20mm。
本技术方案进一步优选的,所述第一弧面与所述第二弧面之间的最短距离的范围为12mm±2mm。
本技术方案进一步优选的,所述第一弧面的半径的范围为70mm-80mm。
本技术方案进一步优选的,所述第一弧面具有沿其弯曲方向两端的第一上边缘和第一下边缘,所述第一上边缘和所述第一下边缘与所述第一弧面的圆心之间的连线的夹角构成第一定位角,所述第一定位角的范围为10°-14°。
本技术方案进一步优选的,所述第二弧面的半径的范围为19mm-25mm。
本技术方案进一步优选的,所述第二弧面具有沿其弯曲方向两端的第二上边缘和第二下边缘,所述第二上边缘和所述第二下边缘与所述第二弧面的圆心之间的连线的夹角构成第二定位角,所述第二定位角的范围为42°-48°。
本技术方案进一步优选的,所述第一边夹的下端和所述第二边夹的下端均呈倒圆角结构。
本技术方案进一步优选的,所述边夹驱动机构为气动手指,所述气动手指包括两个相对运动的夹指,两个所述夹指分别连接所述第一边夹和所述第二边夹。
实施本发明的实施例,具有以下技术效果:
本发明结构简单,通过边夹驱动机构驱动第一边夹和第二边夹相向或相背运动以实现虾的抓取或放下,在抓取虾的过程中,第二边夹和第一边夹分别置于侧躺的对虾的虾背一侧和虾腹一侧,边夹驱动机构驱动第一边夹和第二边夹相向运动,此时,虾背与第二弧面接触,第二边夹施加到虾体背部的力产生向上的分力,使虾体背部向上翻转,虾腹与第一弧面接触,第一边夹施加到虾体腹部的力指向虾背方向,从而推动虾体向第二弧面方向移动,促进虾背沿着第二弧面向上翻转,当虾背翻转后朝上时,虾体容纳于第一边夹和第二边夹之间,通过第一边夹和第二边夹稳定夹持虾体并移动,从而实现虾的抓取定向上料。
附图说明
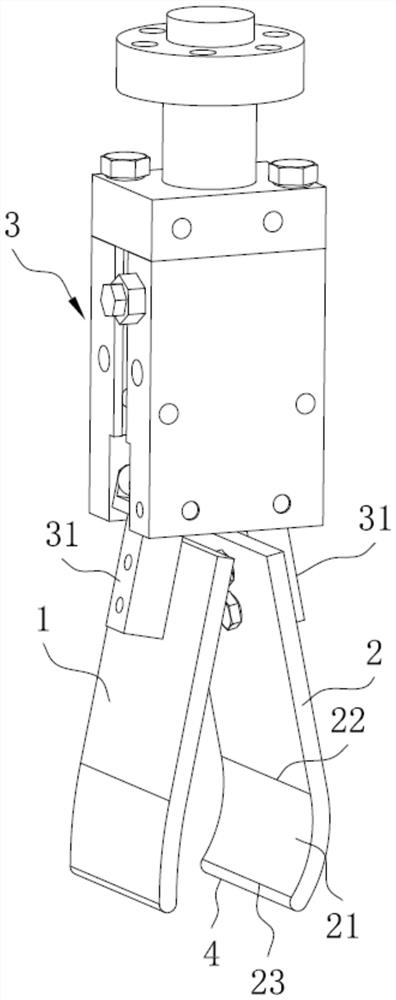
图1是本发明优选实施例的结构示意图;
图2是本发明优选实施例另一视角的结构示意图;
图3是本发明优选实施例夹取虾身的结构受力分析图;
图4是本发明优选实施例中第一边夹和第二边夹的局部示意图。
附图标记说明:
1、第一边夹,11、第一弧面,12、第一上边缘,13、第一下边缘,2、第二边夹,21、第二弧面,22、第二上边缘,23、第二下边缘,3、边夹驱动机构,31、夹指,4、倒圆角结构。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
参考图1-图4,本发明的一个实施例提供了一种抓虾定向装置,包括第一边夹1、第二边夹2以及用于驱动第一边夹1和第二边夹2相对运动的边夹驱动机构3,第一边夹1面向第二边夹2的一侧面形成有背向第二边夹2方向凹陷的第一弧面11,第二边夹2面向第一边夹1的一侧面形成有背向第一边夹1方向凹陷的第二弧面21,第一弧面11的半径大于第二弧面21的半径。
本发明结构简单,参考图3,通过边夹驱动机构3驱动第一边夹1和第二边夹2相向或相背运动以实现虾的抓取或放下,在抓取虾的过程中,第二边夹2和第一边夹1分别置于侧躺的对虾的虾背一侧和虾腹一侧,边夹驱动机构3驱动第一边夹1和第二边夹2相向运动,此时,虾背与第二弧面21接触,第二边夹2施加到虾体背部的力F2产生向上的分力,使虾体背部向上翻转,虾腹与第一弧面11接触,第一边夹1施加到虾体腹部的力F1指向虾背方向,从而推动虾体向第二弧面21方向移动,促进虾背沿着第二弧面21向上翻转,当虾背翻转后朝上时,虾体容纳于第一边夹1和第二边夹2之间,通过第一边夹1和第二边夹2稳定夹持虾体并移动。
进一步的,第一弧面11和第二弧面21的表面粗糙度不大于2μm,从而防止虾背与第二弧面21接触时产生的摩擦力过大,导致虾背无法稳定可靠的沿着第二弧面21向上翻转,可以理解的是,第一弧面11和第二弧面21的表面粗糙度不低于0.5μm,从而避免第一弧面11和第二弧面21与虾体之间产生的摩擦力过小,导致第一边夹1和第二边夹2无法稳定夹持虾体移动,保证抓虾具有较高的可靠程度。
一般来说,在虾类生产中,本实施例中选取虾身厚度大约在7mm-24mm之间,因此,为了使第一边夹1和第二边夹2在抓取虾时,第一弧面11和第二弧面21能贴紧虾体两侧,实现稳定抓取,避免移动过程中掉落,参考图2,本实施例中的第一弧面11与第二弧面21之间的最短距离L的范围为0mm-20mm,避免第一弧面11与第二弧面21之间的距离过大,导致第一边夹1和第二边夹2无法贴紧虾体进行稳定夹持。
另外,本实施例中的边夹驱动机构3为气缸驱动,设置气缸驱动的驱动力带动第一边夹1和第二边夹2相对运动时的夹合力小于压坏虾体的力,因此,即使第一弧面11和第二弧面21之间的最短距离L为0,依然可以稳定夹持虾体,避免压坏虾体。
其中,本实施例中为了防止边夹驱动机构3故障时,降低第一边夹1和第二边夹2在通过边夹驱动机构3驱动相对运动时用力过大损伤虾体的几率,设置第一弧面11和第二弧面21之间的最短距离L的范围为7mm-24mm。
在其它实施例中,本领域技术人员在设置相应第一弧面11和第二弧面21之间的最短距离时,可根据不同尺寸的虾身厚度进行设置,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
具体的,第一弧面11与第二弧面21之间的最短距离L的范围为12mm±2mm。
进一步的,参考图3和图4,本实施例中的第一弧面11的半径r1的范围为70mm-80mm,且第一弧面11具有沿其弯曲方向两端的第一上边缘12和第一下边缘13,第一上边缘12和第一下边缘13与第一弧面11的圆心之间的连线的夹角构成第一定位角,第一定位角a1的范围为10°-14°,以形成足够的弧面范围,使第一边夹1与第二边夹2相向移动时,虾腹能够与第一边夹1的第一弧面11接触,并产生指向虾背方向的力,促使虾背沿着第二弧面21向上翻转。
进一步的,第二弧面21的半径r2的范围为19mm-25mm,一方面,避免半径班委过小导致虾背无法在第二弧面21上转动,反之,第二弧面21的半径范围过大,与虾背接触时无法形成促使虾背向上翻转的可靠的分力;其中,第二弧面21具有沿其弯曲方向两端的第二上边缘22和第二下边缘23,第二上边缘22和第二下边缘23与第二弧面21的圆心之间的连线的夹角构成第二定位角,第二定位角a2的范围为42°-48°,一方面,第二定位角的角度过大容易导致施加于虾背的力的方向偏转,使虾背向上翻转的力减小,无法完成翻转动作,另一方面,第二定位角的角度过小,容易导致第二弧面21无法提供稳定的导向作用引导虾背沿着第二弧面21完成翻转动作,影响生产的稳定性和可靠性。
进一步的,参考图1和图2,由于虾体一般在传送带上进行传送时通过抓虾定向装置进行抓取,因此,本实施例中的第一边夹1的下端和第二边夹2的下端均呈倒圆角结构4,且倒圆角结构4分别与第一弧面11和第二弧面21相切,以使第一边夹1和第二边夹2在抓取虾体时,避免对传送带刮蹭导致传送带的损伤。
参考图2,具体的,本实施例中的边夹驱动机构3为气动手指,气动手指包括两个相对运动的夹指31,两个夹指31分别连接第一边夹1和第二边夹2,以通过两个夹指31的相对运动带动第一边夹1和第二边夹2的相向或相背运动。
其中,气动手指可为Y型夹指或平型夹指。
本发明结构简单,通过边夹驱动机构3驱动第一边夹1和第二边夹2相向或相背运动以实现虾的抓取或放下,在抓取虾的过程中,第二边夹2和第一边夹1分别置于侧躺的对虾的虾背一侧和虾腹一侧,边夹驱动机构3驱动第一边夹1和第二边夹2相向运动,此时,虾背与第二弧面21接触,第二边夹2施加到虾体背部的力产生向上的分力,使虾体背部向上翻转,虾腹与第一弧面11接触,第一边夹1施加到虾体腹部的力指向虾背方向,从而推动虾体向第二弧面21方向移动,促进虾背沿着第二弧面21向上翻转,当虾背翻转后朝上时,虾体容纳于第一边夹1和第二边夹2之间,通过第一边夹1和第二边夹2稳定夹持虾体并移动。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。