一种虾生产上料的输送装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及虾类食品生产技术领域,尤其涉及一种虾生产上料的输送装置。
背景技术
现有技术中,虾类的生产由于虾体的结构较为复杂,在生产中不容易进行定向上下料,导致大部分生产工序都采用人工的方式进行上下料,影响生产的效率和质量,因此,为了提高虾体生产的效率,降低人工投入,亟需设计一款可以实现虾体定向上下料的装置。
发明内容
本发明的目的是提供一种能够对虾体进行定向上料,实现头在前、尾在后上料的虾生产上料的输送装置。
为了实现上述目的,本发明提供一种虾生产上料的输送装置,包括至少两组传送机构,所述传送机构包括传送带,相邻两组所述传送机构的传送带之间限定有用于虾体尾部通过并卡住虾体头部的容纳间隙;
虾尾挡板,其设于所述容纳间隙内且靠近所述传送机构的出料端;
其中,所述虾尾挡板能够阻挡落入所述容纳间隙内的虾体尾部,以使虾体头部移动到虾体尾部的前端进行出料。
本技术方案的进一步改进为,所述虾尾挡板包括阻挡部和导向部,所述阻挡部设有与传送机构送料方向相对的阻挡面,所述阻挡面能够阻挡虾尾向传送机构的送料方向移动,所述导向部一端与阻挡部远离所述阻挡面的一端连接、另一端沿出料方向延伸并向下倾斜形成下料导向斜面。
本技术方案的进一步改进为,所述传送机构包括主动轮和被动轮,所述传送带绕设于所述主动轮和所述被动轮的外周以用于所述主动轮与所述被动轮同步转动。
本技术方案的进一步改进为,所述主动轮和被动轮的外周面均开设有定位凹槽,所述传送带嵌设于所述定位凹槽内。
本技术方案的进一步改进为,所述定位凹槽的内壁呈弧形结构,所述传送带的横截面为圆形,所述传送带的外周面与所述定位凹槽的内壁贴合。
本技术方案的进一步改进为,还包括主动轴和被动轴,所述主动轮套设于所述主动轴上,所述被动轮套设于所述被动轴上。
本技术方案的进一步改进为,所述主动轮滑动套设于所述主动轴上,所述被动轮滑动套设于所述被动轴上。
本技术方案的进一步改进为,所述主动轴套设有若干数量的第一间隔环,所述第一间隔环设于相邻两组传动机构的主动轮之间,所述第一间隔环轴向的两侧面分别与所述主动轮贴合。
本技术方案的进一步改进为,所述被动轴套设有若干数量的第二间隔环,所述第二间隔环设于相邻两组传动机构的被动轮之间,所述第二间隔环轴向的两侧面分别与所述被动轮贴合。
本技术方案的进一步改进为,所述容纳间隙的宽度H为5mm-15mm。
实施本发明的实施例,具有以下技术效果:
在虾体从传送机构上方落下时,虾尾落入容纳间隙中,虾头卡在容纳间隙上方,在传送带移动的同时,带动虾体保持虾头在上、虾尾在下的姿势向出料方向移动,当虾体移动到虾尾挡板的位置时,虾尾受到虾尾挡板的阻挡,此时,虾头向前移动,从而使虾体保持虾头在前、虾尾在后的姿势从传送机构的出料端跌落,实现虾体的虾头、虾尾定向送料。
附图说明
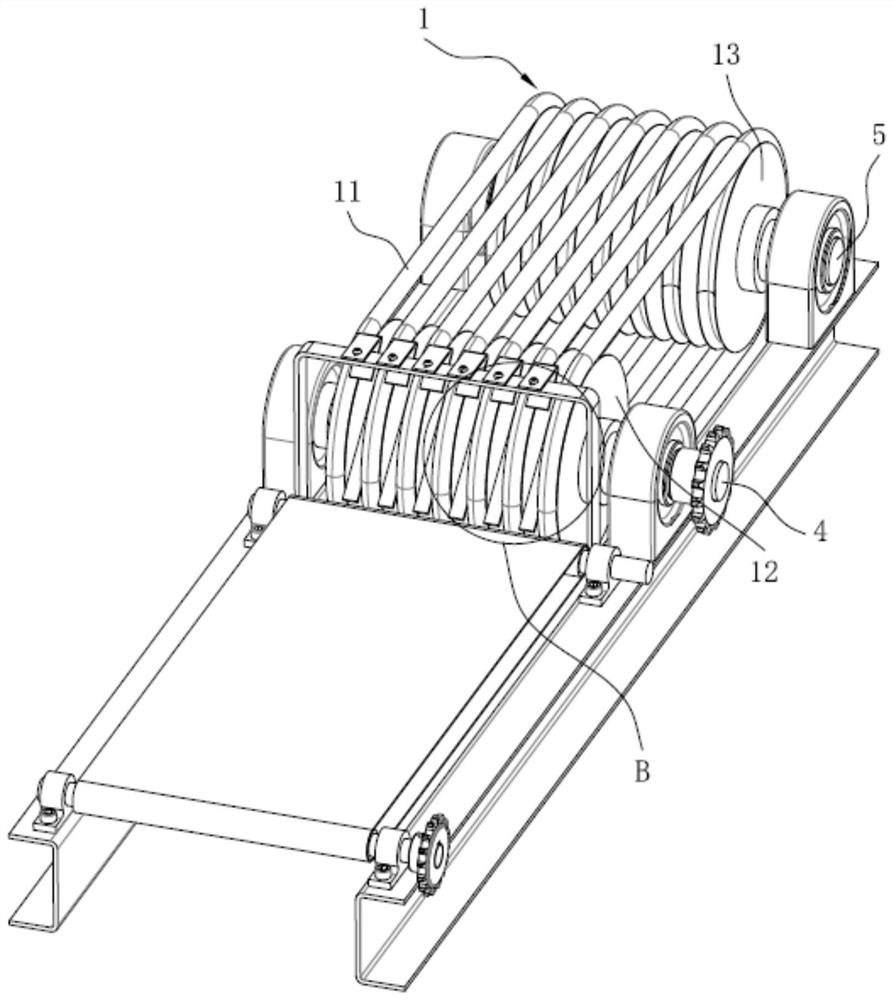
图1是本发明优选实施例的结构示意图;
图2是图1所示实施例的俯视图;
图3是图1所示实施例的后视图;
图4是图1所示实施例的局部结构示意图;
图5是图1中B处的放大示意图;
图6是图2中A-A处的剖视图;
图7是图1中所示实施例中的主动轮的结构示意图。
附图标记说明:
1、传送机构,11、传送带,12、主动轮,13、被动轮,14、定位凹槽,2、容纳间隙,3、虾尾挡板,31、阻挡部,311、阻挡面,32、导向部,321、下料导向斜面,4、主动轴,5、被动轴,6、第一间隔环,7、虾头挡板,71、虾头导向斜面,8、喷头。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
参考图1-图7,本发明的一个实施例提供了一种虾生产上料的输送装置,包括传送机构1和虾尾挡板3。
传送机构1的数量至少有两组,传送机构1包括传送带11,相邻两组传送机构1的传送带11之间限定有用于虾体尾部通过并卡住虾体头部的容纳间隙2;
虾尾挡板3,其设于容纳间隙2内且靠近传送机构1的出料端;
其中,虾尾挡板3能够阻挡落入容纳间隙2内的虾体尾部,以使虾体头部移动到虾体尾部的前端进行出料。
如此,在虾体从传送机构1上方落下时,虾尾落入容纳间隙2中,虾头卡在容纳间隙2上方,在传送带11移动的同时,带动虾体保持虾头在上、虾尾在下的姿势向出料方向移动,当虾体移动到虾尾挡板3的位置时,虾尾受到虾尾挡板3的阻挡,此时,虾头向前移动,从而使虾体保持虾头在前、虾尾在后的姿势从传送机构1的出料端跌落,实现虾体的虾头、虾尾定向送料。
具体的,参考图4,本实施例中的虾尾挡板3包括阻挡部31和导向部32,阻挡部31设有与传送机构1送料方向相对的阻挡面311,阻挡面311能够阻挡虾尾向传送机构1的送料方向移动,从而在传送带11的带动下使虾头相对虾尾向前移动,然后,由于导向部32一端与阻挡部31远离阻挡面311的一端连接、另一端沿出料方向延伸并向下倾斜形成下料导向斜面321,当虾体从传送机构1的出料端跌落时,虾体跌落到下料导向斜面321,使虾体平缓滑落到下一加工工序机构上;需要说明的是,本申请还包括下料装置,下料装置设有输送带,此时,下料导向斜面321的一端靠近输送带,使跌落到下料导向斜面321上的虾体沿着下料导向斜面321滑落到输送带,以向下一加工工序移动。
进一步的,阻挡面311沿远离导向部32方向延伸并向下倾斜,使虾体尾部与当面接触时,避免虾体尾部勾住虾尾挡板3,通过阻挡面311阻挡后,由于虾体头部在传送带11的持续带动下,将虾体尾部沿着阻挡面311拖动并到达下料导向斜面321后进行下料。
进一步的优选的,在另一实施例中,为了实现虾体呈现虾头在后、虾尾在前的姿势从传送机构1的出料端跌落,传送机构1的出料端设有虾头挡板7,在使用过程中,降低虾尾挡板3的高度,避免虾尾挡板3阻挡虾体尾部,同时,使虾体头部在从传送机构1的出料端下料时,虾体头部受到虾头挡板7的阻挡,此时虾体尾部向前翘起,形成虾头在后、虾尾在前的姿势,并沿着下料导向斜面321滑下,实现虾体呈现虾头在后、虾尾在前的姿势出料。
因此,本实施例通过设置虾尾挡板3和虾头挡板7,且本领域技术人员通过虾体的不同大小设置虾尾挡板3和虾头挡板7的位置,通过虾尾挡板3阻挡虾体尾部或虾头挡板7阻挡虾体头部,即可实现虾头在前或虾尾在前的出料方式。
进一步的,本实施例中的虾头挡板7设有从上至下且向出料方向倾斜延伸的虾头导向斜面71,虾头导向斜面71设置于传送机构1的出料端的斜上方并面向传送机构1,从而使虾头挡板7的虾头导向斜面71阻挡虾头后,虾头可沿着虾头导向斜面71滑出传送机构1。
本实施例进一步优选的,虾体头尾定向装置包括有用于喷水的喷头8,该喷头8设于容纳间隙2中用于向靠近传送机构1出料口的虾体喷水,使虾体保持表面湿润,从而减小虾体从下料导向斜面321上滑下时与下料导向斜面321之间产生的摩擦力。
在本实施例中,参考图1-图3,为了实现相邻两组传送机构1之间设置容纳间隙2的情况下输送虾体,因此,本实施例中的传送机构1包括主动轮12和被动轮13,传送带11绕设于主动轮12和被动轮13的外周以用于主动轮12与被动轮13同步转动,如此,通过主动轮12与驱动装置连接进行驱动并带动传送带11绕主动轮12和被动轮13循环转动,从而使落在容纳间隙2上的虾体随着传送带11向前移动。
参考图7,主动轮12和被动轮13的外周面均开设有定位凹槽14,传送带11嵌设于定位凹槽14内,使传送带11稳定在主动轮12和被动轮13的限定位置转动。
其中,定位凹槽14的内壁呈弧形结构,传送带11的横截面为圆形,传送带11的外周面与定位凹槽14的内壁贴合,提高传送带11与主动轮12、被动轮13之间的摩擦力,使传送带11稳定可靠的循环转动。
进一步优选的,参考图2,本实施例中主动轮12的轴线与被动轮13的轴线之间的距离L不小于100mm,使落到传送机构1上的虾体尾部尽可能的在传送过程中落入到容纳间隙2中,从而提高虾体定位的可靠性。
参考图1-图3,还包括主动轴4和被动轴5,主动轮12套设于主动轴4上,被动轮13套设于被动轴5上,使至少两组的传送机构1达到相同的转速,从而保证相邻的传送机构1的传送带11同步移动夹持虾头并进行输送。
主动轮12滑动套设于主动轴4上,被动轮13滑动套设于被动轴5上,方便移动主动轮12和被动轮13,从而调节容纳间隙2的宽度,适应不同尺寸的虾体进行输送,具体的,主动轴4套设有若干数量的第一间隔环6,第一间隔环6设于相邻两组传动机构的主动轮12之间,第一间隔环6轴向的两侧面分别与主动轮12贴合;被动轴5套设有若干数量的第二间隔环,第二间隔环设于相邻两组传动机构的被动轮13之间,第二间隔环轴向的两侧面分别与被动轮13贴合;从而通过使用不同轴向尺寸的间隔环使相邻两组传送机构1的传送带11之间的间隔固定,保证容纳间隙2的宽度在装置工作过程中的稳定;需要说明的是,第一间隔环6和第二间隔环可分别与主动轮12、被动轮13可拆卸装配或一体成型。
参考图6,容纳间隙2的宽度H为5mm-15mm,从而使用大多数尺寸的虾体的加工,需要说明的是,对于本领域技术人员来说,在获知本申请的技术方案的基础上,针对不同虾体的尺寸进行设置不同于本申请所公开的容纳间隙2的尺寸,也应视为本发明的保护范围。
综上,在虾体从传送机构1上方落下时,虾尾落入容纳间隙2中,虾头卡在容纳间隙2上方,在传送带11移动的同时,带动虾体保持虾头在上、虾尾在下的姿势向出料方向移动,当虾体移动到虾尾挡板3的位置时,虾尾受到虾尾挡板3的阻挡,此时,虾头向前移动,从而使虾体保持虾头在前、虾尾在后的姿势从传送机构1的出料端跌落,实现虾体的虾头、虾尾定向送料;
另外,在通过调整虾尾挡板3和虾头挡板7的位置,可分别实现虾头在前或虾尾在前进行出料,适用更多的加工要求。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。