共享式海洋漂浮垃圾捕捞装置
文献发布时间:2023-06-19 18:25:54
技术领域
本发明属于海洋环保设备技术领域,尤其涉及一种共享式海洋漂浮垃圾捕捞装置。
背景技术
随着我国现代化进程的加快、垃圾产生量的增加,水上漂浮垃圾的数量也日益增多。面对当前日益严重的海洋垃圾现状,目前主要有两种处理方法,分别是近海固定装置收集、专用船只捕捞。但这两种处理方式均存在能耗大、成本高、打捞范围有限等共性问题。此外,由于我国海域辽阔,垃圾范围广,有限的船只参与大范围的垃圾捕捞工作当中,在很大程度上减缓了垃圾收集的进度,工作效率低下,不能满足垃圾清理需求。
发明内容
本发明的目的是提供一种共享式海洋漂浮垃圾捕捞装置,旨在解决现有技术中近海固定装置收集及专用船只捕捞清理垃圾效率低的技术问题。
为解决上述技术问题,本发明所采取的技术方案是:
一种共享式海洋漂浮垃圾捕捞装置,包括能够与船体相连的升降机构,所述升降机构的活动端设有用于收集垃圾的收集筒及用于倾倒垃圾的卸料机构,所述卸料机构设置于收集筒的底部,所述收集筒为由伸缩机构驱动的伸缩式结构;通过升降机构能够将折叠收纳于船体内的收集筒和卸料机构翻转至水面上。
优选的,所述升降机构包括驱动部件和六连杆组件,所述驱动部件设置于夹具本体上,用于驱动六连杆组件伸缩;所述夹具本体通过夹紧机构与船体相连,所述卸料机构的安装板与六连杆组件末端的底盘连接板相连。
优选的,所述六连杆组件包括第一连杆、第二连杆、第三连杆、第四连杆、第五连杆和第六连杆,所述第二连杆的一端与夹具本体外侧上部转动相连、另一端与第六连杆的一端转动连接,所述第三连杆、第四连杆、第五连杆的一端转动相连,所述第三连杆的另一端与第二连杆的中部转动相连,所述第五连杆的另一端与第六连杆的中下部转动相连,所述第四连杆的另一端与夹具本体外侧下部转动相连,所述第二连杆、第三连杆、第五连杆及第六连杆能够围拢为一个平行四边形;
所述六连杆组件为两组、且并列设置,两个第六连杆的末端通过底盘连接板相连;所述驱动部件为电动推杆,所述电动推杆设置于两组六连杆组件之间,所述电动推杆驱动两组六连杆组件同时伸展与回缩。
优选的,所述夹具本体的外侧面上竖向设有两个底座,所述底座沿其长度方向设有用于容纳六连杆组件的腔体,两个第二连杆及第四连杆的下端与底座腔体上下转动相连,两个第一连杆的连接端均与两个底座之间滑动支座上销轴的两端转动相连,所述电动推杆与滑动支座中部销轴转动相连,用于驱动滑动支座在两侧底座滑槽内滑动,所述滑动支座通过销轴带动两组六连杆机构的第一连杆运动,用于驱动六连杆组件伸缩。
优选的,所述夹紧机构包括夹具本体、固定螺杆和扳手,所述夹具本体为开口向下的U形夹框,所述夹具本体能够悬挂于船体上,所述固定螺杆与里侧夹框上的螺纹孔螺纹配合,所述扳手与固定螺杆配合,用于拧紧固定螺杆将夹具本体固定在船体上;所述固定螺杆的末端设有用于与船体内侧壁抵接的压块。
优选的,所述卸料机构包括安装板、电机一、齿圈、多根连接杆及多个鸢尾花瓣,所述安装板的一端固定于底盘连接板上,所述安装板的外侧设有用于安装齿圈和鸢尾花瓣的环形圆盘,所述圆盘的中部为卸料孔;
所述齿圈设置于圆盘的外环内部,所述电机一设置于安装板上,用于驱动齿圈旋转;多根连接杆均布于齿圈的内侧边缘上,所述连接杆的一端与齿圈转动相连、另一端与鸢尾花瓣的外边缘一端转动相连,所述鸢尾花瓣的外边缘另一端通过转轴与圆盘的内环边缘转动相连;转动的齿圈带动连接杆摆动,进而带动鸢尾花瓣绕转轴旋转,多个鸢尾花瓣能够在电机一的驱动下张开与闭合,用以打开或封堵卸料孔。
优选的,所述内环与齿圈之间间隔设有多个轴承。
优选的,所述收集筒包括由伸缩机构驱动的筒体架及其内部的收集网,所述筒体架包括六个首尾相连的剪叉框架,所述收集网为两端开口的筒状、且设置于六个剪叉框架的内部;每个剪叉框架由两根连杆交叉组成,两两相邻的剪叉框架通过连接角块相连,相邻剪叉框架的连杆末端与相对应的连接角块转动相连;其中一个剪叉框架的两端连接角块分别与支撑座及伸缩机构相连,所述支撑座及伸缩机构均与底盘连接板相连,所述伸缩机构由电机二驱动,通过伸缩机构驱动六个剪叉框架同时收缩与张开。
优选的,所述伸缩机构包括丝杆和滑块,所述丝杆由电机二驱动,所述滑块与丝杆转动配合,所述丝杆的两端分别与支撑座及固定座转动配合,所述固定座及支撑座均设置于与底盘连接板相连的底板上,所述滑块与剪叉框架的活动端连接角块相连。
优选的,所述收集网由弹性材料制作而成。
采用上述技术方案所产生的有益效果在于:与现有技术相比,本发明通过在船体上安装升降机构,并在升降机构的活动端安装卸料机构和伸缩式收集筒,通过升降机构能够将折叠收纳于船体内的收集筒和卸料机构翻转至水面上,收集筒由伸缩机构驱动其张开,伴随着海浪的移动收集垃圾,在收集桶收满垃圾时,船员再驱动升降机构将收集筒翻转至船上,启动卸料机构打开收集筒的出料口将垃圾排放到船上。本发明采用船舶携带共享的方式进行海洋垃圾捕捞,适合能适应不同船舶,利用船舶的固有动力即可在海上行驶,节约人力物力成本,能耗低,绿色环保;相对现有技术中近海固定装置收集及专用船只捕捞垃圾,扩大了垃圾收集范围,远海近海均适用,提高了垃圾清理效率,实现对漂浮的垃圾高效收集的目的,改变海洋垃圾难以收集的现状。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细的说明。
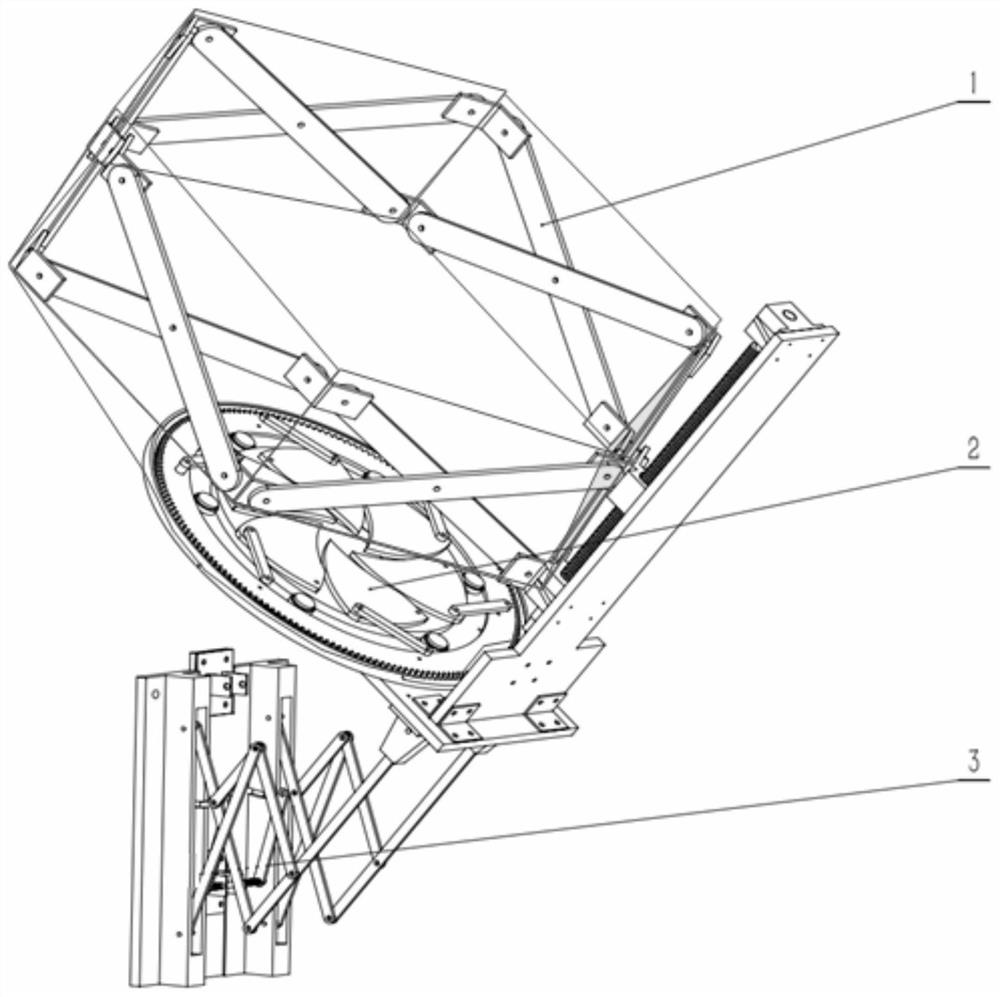
图1是本发明实施例提供的一种共享式海洋漂浮垃圾捕捞装置的结构示意图;
图2是图1中收集筒机伸缩机构的结构示意图;
图3是图1中卸料机构的结构示意图;
图4是图1中升降机构的结构示意图;
图5是图4中升降机构中六连杆组件的示意图;
图6是图4中升降机构中的正视图;
图7是图4中升降机构中的左视图;
图8是图4中升降机构中的俯视图;
图9是本发明实施例中夹紧机构的结构示意图;
图10是本发明的应用流程示意图;
图中:1-升降机构,2-卸料机构,3-收集机构;4-连接角块,5-收集网,6-连杆,7-支撑座,8-滑块,9-丝杆,10-固定座,11-底板;12-直角角码,13-安装板,14-齿圈,15-连接杆,16-鸢尾花瓣,17-支柱,18-外环,19-轴承,20-圆盘,21-转轴,22-内环;23-底座,24-电动推杆,25-底盘连接板;26-滑动支座,27-销轴,28-第一连杆,29-第二连杆,30-第三连杆,31-第四连杆,32-第五连杆,33-第六连杆;34-扳手,35-固定螺杆,36-夹具本体。
具体实施方式
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图1,本发明提供的一种共享式海洋漂浮垃圾捕捞装置包括能够与船体相连的升降机构1,所述升降机构1的活动端设有用于收集垃圾的收集筒2及用于倾倒垃圾的卸料机构3,所述卸料机构3设置于收集筒2的底部,所述收集筒2为由伸缩机构驱动的伸缩式结构;通过升降机构1能够将折叠收纳于船体内的收集筒2和卸料机构3翻转至水面上。其中,所述升降机构1包括驱动部件和六连杆组件,所述驱动部件设置于夹具本体36上,用于驱动六连杆组件伸缩;所述夹具本体36通过夹紧机构与船体相连,所述卸料机构3的安装板13与六连杆组件末端的底盘连接板32相连。在船体上安装升降机构,通过升降机构能够将折叠收纳于船体内的收集筒和卸料机构翻转至水面上,伸缩机构驱动收集筒张开,伴随着海浪的移动收集垃圾,当收集桶收满垃圾时,船员再驱动升降机构将收集筒翻转至船上,启动卸料机构打开收集筒将垃圾排放到船上。该方案采用船只携带的方式随时捕捞海洋垃圾,安装简单易操作,随着船只的航线随时捕捞垃圾,扩大了垃圾清理范围,机动灵活,提高设备的便捷性以及实用性,提高了垃圾清理效率。
在本发明的一个具体实施例中,如图4所示,所述的六连杆组件为完全相同的两组,分布于夹具本体36两侧,底座23上设置有滑槽,所述电动推杆24驱动滑动支座26在底座23的滑槽内上下滑动,所述滑动支座26在销轴27传递作用下,带动两组六连杆机构的第一连杆28运动,由此实现六连杆组件的伸缩。所述六连杆组件包括第一连杆28、第二连杆29、第三连杆30、第四连杆31、第五连杆32、第六连杆33,销轴27两端连接两组六连杆组件的第一连杆28,实现两组连杆的同步运动,所述第一连杆28一端铰接于第二连杆29,另一端与销轴27转动相连,销轴27铰接于滑动支座26上。
第二连杆29和第四连杆31的一端铰接于底座23,所述第三连杆30、第四连杆31、第五连杆32的一端转动相连,所述第三连杆30的另一端与第二连杆29的中部转动相连,所述第五连杆32的另一端与第六连杆33的中下部转动相连,所述第四连杆31的另一端与夹具本体36外侧下部转动相连,所述第二连杆29、第三连杆30、第五连杆32及第六连杆33能够围拢为一个平行四边形;所述第二连杆29、第三连杆30、第四连杆31、第五连杆32及第六连杆33均为两个、且并列设置,所述底盘连接板25设置于两个第六连杆33的末端;所述驱动部件为电动推杆24铰接安装于滑动支座26,所述电动推杆24设置于第二连杆29、第三连杆30、第四连杆31、第五连杆32及第六连杆33之间的夹具本体36外侧面上,两侧第二连杆29与第三连杆30的相交点通过铰接轴相连,所述电动推杆24的活动端端铰接于滑动支座26,可推动滑动支座26、销轴27的平移。其中,夹具本体36外侧面中部设有安装电动推杆24的滑动支座26。利用电动推杆24的伸缩可驱动六连杆组件展开或回收,方便将卸料机构机收集筒伸至海面上或回收至船体内,操作方便灵活。
作为一种优选结构,如图4所示,所述夹具本体36的外侧面上竖向设有两个底座23,所述底座23沿其长度方向设有用于容纳六连杆组件的腔体,所述第二连杆27及第四连杆29的连接端均与腔体底部转动相连。采用该结构方便在升降机构回收时将第二连杆27、第三连杆28、第五连杆30及第六连杆31收纳至底座23的腔体内,避免杆件外露造成剐蹭。
具体安装升降机构时,如图5所示,所述夹紧机构包括夹具本体36、固定螺杆35和扳手34,所述夹具本体36为开口向下的U形夹框,所述夹具本体36能够悬挂于船体上,所述固定螺杆35与里侧夹框上的螺纹孔螺纹配合,所述扳手34与固定螺杆35配合,用于拧紧固定螺杆35将夹具本体固定在船体上;所述固定螺杆35的末端设有用于与船体内侧壁抵接的压块,借助压块能够增大固定螺杆与船体侧壁的接触面积,确保固定牢固。将夹具本体悬挂于船体侧壁上,船员在船内侧利用扳手手动即可拧紧固定螺杆,将带有升降机构的夹具本体固定在船体的侧壁上,方便随船携带垃圾清理装置。当然,也可以通过在船体上打孔,直接将夹具本体固定在船体上亦可。
在本发明的一个具体实施例中,如图3所示,所述卸料机构3包括安装板13、电机一、齿圈14、多根连接杆15及多个鸢尾花瓣16,所述安装板13的一端固定于底盘连接板32上,所述安装板13的外侧设有用于安装齿圈14和鸢尾花瓣16的环形圆盘20,所述圆盘20的中部为卸料孔;所述齿圈14设置于圆盘的外环18内部,所述电机一设置于安装板13上,用于驱动齿圈14旋转;多根连接杆15均布于齿圈14的内侧边缘上,所述连接杆15的一端与齿圈14转动相连、另一端与鸢尾花瓣16的外边缘一端转动相连,所述鸢尾花瓣16的外边缘另一端通过转轴21与圆盘的内环22外边缘转动相连;转动的齿圈14带动连接杆15摆动,进而带动鸢尾花瓣16绕转轴21旋转,多个鸢尾花瓣16能够在电机一的驱动下张开与闭合,用以打开或封堵卸料孔。其中,连接杆15与齿圈之间设有支柱17,方便转动的鸢尾花瓣16向外旋转同时,所述内环22与齿圈14之间间隔设有多个轴承19。采用上述卸料机构的卸料过程如下:
在正常捕捞垃圾过程中,鸢尾花瓣始终闭合封堵收集筒的出口。当收集筒内垃圾集满后,启动电动推杆24可使展开的六连杆组件回收,驱动底盘连接板向船内翻转,带动安装板上的齿圈、鸢尾花瓣及收集筒翻转90°转移到船体内,此时启动电机一,齿轮转动带动连接杆向外侧摆动,进而驱动鸢尾花瓣张开,打开收集筒的出口,垃圾在重力作用下倾倒在船体内。
在本发明的一个具体实施例中,如图1、2所示,所述收集筒2包括由伸缩机构驱动的筒体架及其内部的收集网5,所述筒体架包括六个首尾相连的剪叉框架,所述收集网5为两端开口的筒状、且设置于六个剪叉框架的内部;每个剪叉框架由两根连杆6交叉组成,两两相邻的剪叉框架通过连接角块4相连,相邻剪叉框架的连杆6末端与相对应的连接角块4转动相连;其中一个剪叉框架的两端连接角块4分别与支撑座7及伸缩机构相连,所述支撑座7及伸缩机构均与底盘连接板32相连,所述伸缩机构由电机二驱动,通过伸缩机构驱动六个剪叉框架同时收缩与张开。其中,收集网5由弹性材料制作而成,方便随垃圾量的变化而闭合;剪叉框架采用钢铁材料制成而成,可作为收缩骨架对收集的垃圾进行压缩。采用伸缩机构驱动剪叉框架的扩张与回缩,能够在收集垃圾过程中扩大收集垃圾的横截面积,在垃圾收集完成时能够缩小收集垃圾的横截面积,压缩后的垃圾不会占用太大空间,提高了收集筒的空间利用率。
具体制作时,如图2所示,所述伸缩机构包括丝杆9和滑块8,所述丝杆9由电机二驱动,所述滑块8与丝杆9转动配合,所述丝杆9的两端分别与支撑座7及固定座10转动配合,所述固定座10及支撑座7均设置于与底盘连接板32相连的底板11上,所述滑块8与剪叉框架的活动端连接角块4相连。底板11通过直角角码12安装在安装板13上,底板垂直高度在安装板上,可使收集筒及收集网的出口端与鸢尾花瓣所对应的卸料孔相邻,通过鸢尾花瓣的开合实现收集筒的卸料与否。
另外,为了进一步提高设备的自动化程度,操作人员在船体内可利用遥控器来控制电动推杆24、电机一和电机二的动作,实现升降、收集和卸料的协调运动。方便工作人员随时将收集筒升起倾倒垃圾,进一步提高了工作效率。
综上所述,本发明具有结构紧凑、方便随船携带、垃圾清理范围广的优点,利用固有船只及船只的固有动力,无需专用船只,能适应不同类型、规格、大小、重量的船舶,成本低、能耗低,绿色环保,且具有良好的全民公益性及环保宣传效果;垃圾清理作业半径大,远海近海均适用,且不影响渔业活动;无需过多人力即可实现海洋垃圾的捕捞,相对人工打捞极大减轻了工作人员的劳动强度,简洁、高效、易操作。
上面的描述阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受上面公开的具体实施例的限制。