尾座式垂直起降飞机
文献发布时间:2023-06-19 09:52:39
相关申请的交叉引用
本专利申请要求2018年6月28日提交的欧洲专利申请第18180581.3号的优先权,其全部公开内容通过引用并入本文。
技术领域
本发明涉及一种尾座式垂直起降飞机(tail sitter)。
背景技术
自二十世纪中叶以来,航空工业已经意识到需要能够垂直起降并具有足够高的巡航速度来迅速覆盖中/长距离航线的航空器。
针对这种需求的部分方案包括直升机和推力换向式飞机,但是它们也不是没有缺点。
直升机实际上的最高速度大约为350km/h。推力换向式飞机需要在直升机构造与飞机构造之间使发动机舱和旋翼一起旋转,因此从结构的角度来看特别复杂。
为满足这种需求而提出的另一种方案包括VTOL(Vertical Take-off Landing,垂直起降)航空器。它们具有机身保持水平的起飞/降落构造,并且发动机能够在起飞/降落期间将推力定向在垂直方向上或者在水平平移飞行期间定向在水平方向上。
尽管VTOL航空器使用广泛并且是有效的,但是它们的结构构造却特别复杂。这样的原因是需要根据航空器的起飞/降落/飞行状态对发动机的推力方向进行选择性的定向。
为满足上述需求而提出的另一种方案是在二十世纪四十年代至六十年代间开发的,并且包括尾座式垂直起降飞机。
这样的航空器基本包括机身、一对半翼、通常由机身承载的一个或多个驱动构件以及配备有用于控制航空器的可动表面的尾翼。
尾座式垂直起降飞机的飞行剖面考虑到航空器机身垂直定位的起飞、航空器旋转90度呈现巡航位置的第一过渡阶段以及航空器返回机身垂直定位执行降落的第二过渡阶段。
在起降阶段,尾座式垂直起降飞机通过通常由航空器的尾翼承载的轮子而搁置在地面上。
随后,马达的推力抵抗起飞/降落状态下的尾座式垂直起降飞机的重量以及飞行状态下的空气的气动阻力。
这些方案的原型以洛克希德·马丁公司的XFV-1、康维尔公司的XFY-1 Pogo和瑞安公司的X-13 Vertijet航空器为代表。
US1,665,114、US-2017/0297699、CN-A-106938701、US-A-2017/0166305、WO-A-2016/209350、US-A-2016/0311553和US-B-5,114,096描述了已知的尾座式垂直起降飞机方案。
尾座式垂直起降飞机的特别有利之处在于它们具有与飞机基本相似的构造,并因此与推力换向式飞机和VTOL航空器相比构造特别简单。
此外,与直升机不同,尾座式垂直起降飞机对最大巡航速度没有特殊限制,其与传统飞机的最大巡航速度不相上下。
然而,尾座式垂直起降飞机的垂直起降位置对半翼的形状施加了几何上和操作上的限制,尤其是在尾座式垂直起降飞机的重量超过特定阈值的情况下。例如,需要在最大程度上减小暴露于风中的半翼的表面,从而在最大程度上减小起飞/降落阶段中对阵风的敏感性。
结果是,这些半翼的构造损害了尾座式垂直起降飞机在巡航位置的性能。
这实质上阻止了尾座式垂直起降飞机的有效使用。实际上,前面提到的大多数原型都从未形成实际推广应用的航空器。结果是,在过去的五十年中,基本上已经放弃了使用尾座式垂直起降飞机,主要采用VTOL航空器。
业内已经意识到需要生产具有与传统飞机相当的常规平衡性能的尾座式垂直起降飞机。
业内也意识到需要使尾座式垂直起降飞机的起降操作更容易。
最后,业内已经意识到需要将减小的尾座式垂直起降飞机尺寸与上述改进的常规平衡飞行性能结合起来。
WO-A-2015/005954公开了一种根据权利要求1的前序部分所述的尾座式垂直起降飞机。
EP-A-3243750公开了一种用于飞行器的分布式推进系统,其包括:框架;以分布式构造设置在框架内或附接于框架的多个液压式或电动式马达;操作性地连接至每个液压式或电动式马达的螺旋桨;设置在框架内或附接于框架并耦合至设置在框架内或附接于框架的每个液压式或电动式马达的液压或电力源,其中该液压或电力源提供足够的能量密度以使飞行器达到并维持飞行器的操作;耦合至每个液压式或电动式马达的控制器;以及可通信地耦合至每个控制器的一个或多个处理器,其控制多个液压式或电动式马达的操作和速度。
EP-A-3263445公开了一种航空器,其包括具有构架的飞行框架、附接于该构架的推进系统以及与该推进系统操作性地关联的飞行控制系统,其中飞行框架具有垂直起降模式和向前飞行模式。吊舱组件可选择性附接于飞行框架,使得飞行框架可围绕吊舱组件旋转,其中,在垂直起降期间、向前飞行期间以及它们之间的过渡阶段期间,吊舱组件保持大致水平的姿态。
WO-A-2016/058502公开了一种尾座式垂直起降飞机,其包括航空器主体、航空器机翼、姿态控制装置以及使用热机作为动力装置的主推力装置,其中航空器机翼包括左半翼和右半翼,姿态控制装置包括滚转姿态调节装置、俯仰姿态调节装置和飞行控制系统。
发明内容
本发明的目的是提供一种能够以简单且廉价的方式满足前述至少一种需求的尾座式垂直起降飞机。
上述目的在涉及根据权利要求1所述的一种尾座式垂直起降飞机的情况下通过本发明得以实现。
附图说明
为了更好地理解本发明,下面将仅通过非限制性例子并参照附图来描述两个优选实施方式,在附图中:
-图1是仅出于说明目的而示出的尾座式垂直起降飞机的实施方式处于起飞/降落位置的立体图;
-图2是图1的尾座式垂直起降飞机处于巡航位置的立体图;
-图3和图4是图1和图2的尾座式垂直起降飞机在执行第一操作期间并且分别处于起飞/降落位置和巡航位置的立体图;
-图5和图6是图1和图2的尾座式垂直起降飞机在执行第二操作期间并且分别处于起飞/降落位置和巡航位置的立体图;
-图7和图8是图1和图2的尾座式垂直起降飞机在执行第三操作期间并且分别处于起飞/降落位置和巡航位置的立体图;
-图9是示出根据本发明原理制造的尾座式垂直起降飞机的第一实施方式处于巡航位置的立体图;
-图10是仅出于说明目的示出的尾座式垂直起降飞机的另一个实施方式处于起飞/降落位置的立体图;
-图11是图10的尾座式垂直起降飞机处于巡航位置的立体图;
-图12和图13是图10和图11的尾座式垂直起降飞机在执行第一操作期间并且分别处于起飞/降落位置和巡航位置的立体图;
-图14和图15是图10和图11的尾座式垂直起降飞机在执行第二操作期间并且分别处于起飞/降落位置和巡航位置的立体图;
-图16和图17是图10和图11的尾座式垂直起降飞机在执行第三操作期间并且分别处于起飞/降落位置和巡航位置的立体图;
-图18和图19是仅出于说明目的示出的尾座式垂直起降飞机的另外的实施方式分别处于起飞/降落位置和巡航位置的立体图;并且
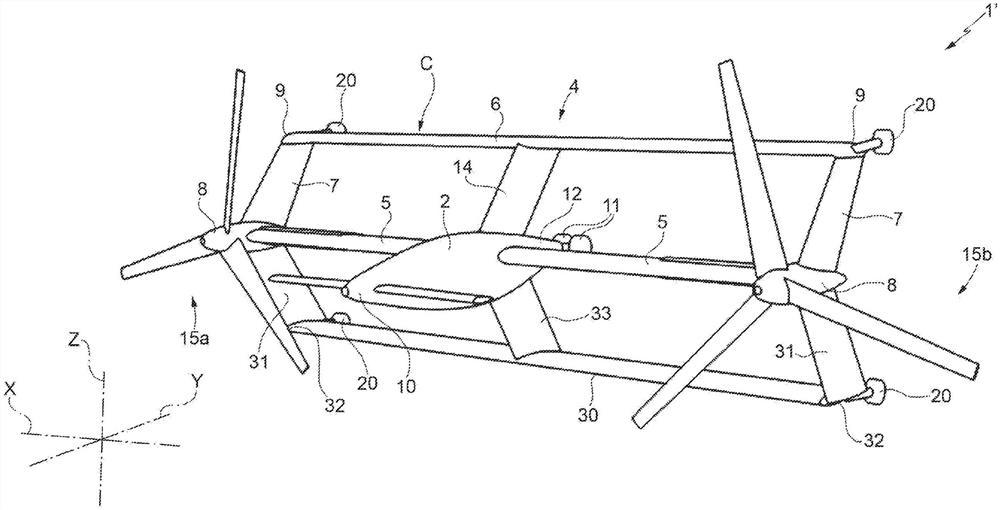
-图20是根据本发明的原理制造的尾座式垂直起降飞机的第二实施方式的立体图。
具体实施方式
参照图1和图2,附图标记1表示根据本发明制造的尾座式垂直起降飞机。
航空器1包括机身2。
可以识别与航空器1为一体的一组三条轴线,它们的原点在航空器1的重心处并且形成为:
-平行于机身2的延伸方向的Y轴;
-与Y轴正交的X轴;以及
-与X-Y轴正交的Z轴。
航空器1可通过已知的方式呈现巡航位置(图2所示)。在该巡航位置,Y轴相对于垂直方向倾斜。特别地,在恒定高度前向飞行的情况下Y轴水平设置。
在本说明书中,使用表述“巡航位置”来表示航空器1以具有至少一个水平飞行分量的速度行进的飞行构造。
在航空器1的该巡航位置,航空器1围绕X-Y-Z轴的旋转与以下操作相关联:
-滚转,即围绕Y轴旋转(图6);
-俯仰,即围绕X轴旋转(图4);
-偏航,即围绕Z轴旋转(图8)。
航空器1还可以呈现图1所示的起飞/降落位置,其中Y轴垂直设置。
在该起飞/降落位置,航空器1围绕X-Y-Z轴的旋转与以下操作相关联:
-滚转,即围绕Z轴旋转(图5);
-俯仰,即围绕X轴旋转(图7);以及
-偏航,即围绕Y轴旋转(图3)。
航空器1的飞行剖面提供了从起飞位置到巡航位置的第一过渡阶段、保持巡航位置以及从巡航位置到降落位置的第二过渡阶段。
航空器1有利地包括具有闭合的前部翼段C的机翼4,该机翼从机身2伸出。
在本说明书中,术语“具有闭合的前部翼段的机翼”是指自身闭合且没有自由端部的非平面机翼。
前部翼段C由机翼4在与Y轴正交的平面上的投影限定。
更详细地,机翼4基本包括:
-分别以悬臂的方式从机身2的彼此相对的两侧上突出的一对半翼5;
-在航空器1的巡航位置设置在半翼5上方的部分6;以及
-一对连接翼段7,它们各自在半翼5的相应的自由端部8和部分6的相应的自由端部9之间延伸。
在所示的例子中,部分6和半翼5彼此平行。
半翼5和部分6沿着X轴延伸。
在所示的例子中,半翼5沿着X轴的总长度等于部分6沿着X轴的长度。
在所示的例子中,半翼5和部分6也是平直的,具有恒定的翼弦、零机翼后掠角和零反角。
翼段7彼此平行并且沿着与X-Y轴正交的Z轴延伸。
航空器1还包括在机身2与部分6的中间翼段18之间延伸的另一个连接翼段14。
特别地,翼段14平行于翼段7并在翼段7之间居中地沿着方向Z延伸。
在所示的例子中并参考航空器1的巡航位置,部分6设置在半翼5的上方。
机身2还包括:
-设置在机身2的尾部12上的一对降落构件11;以及
-靠近机身2的与尾部12相对的头部10设置的一对前翼13。
机翼4还支撑:
-由机翼4承载的一对发动机15a和15b;以及
-多个降落构件20,它们在航空器1处于起飞/降落位置时搁置在地面上。
特别地,发动机15a和15b各自包括:
-桨毂16,其围绕各自的与Y轴平行的轴线A旋转并由未被示出的驱动构件驱动旋转;以及
-多片桨叶17,它们沿着各自的轴线B以悬臂的方式从桨毂16突出。
特别地,桨叶17与桨毂16一体地围绕相应的轴线A旋转。
发动机15a和15b的桨毂16的轴线A投射到机翼4的前部翼段C上。
换句话说,轴线A沿着机翼4的前部翼段C设置。
发动机15a和15b的桨毂16的轴线A投射到相应的半翼5与相应的翼段7相交处的前部翼段C上。
发动机15a和15b的桨毂16的轴线A还相对于机身2的、与Y-Z轴平行且与X轴正交的中间平面设置在机身2的彼此相对的横向两侧上。
发动机15a和15b各自的桨叶17的周期桨距是固定的。
在所示的例子中,航空器1包括控制单元19(仅在图2、图4、图6和图8中示意性示出),其被编程为彼此独立地控制发动机15a和15b围绕它们各自的旋转轴线A的角速度以及桨叶17相对于气流的总桨距角。
这样,控制单元19被编程为控制由各个发动机15a和15b产生的推力。
桨叶17以悬臂的方式在朝向机身2的头部10的一侧上从机翼4突出。
更详细地,降落构件20定位在半翼5与翼段7之间以及翼段7与部分6之间的相交拐角上上。
降落构件20在朝向机身2的尾部12的一侧上从机翼4突出。
在所示的例子中,有四个降落构件20。
半翼5还包括多个相应的副翼21,它们相对于航空器1的飞行状态设置在相应的发动机15a和15b的下游。
因此,副翼21受到发动机15a和15b产生的气流的撞击。
从图4和图5所示的中立位置开始,副翼21可通过控制单元19控制:
-以对称的方式,即相对于机翼4在相同的方向上倾斜相同的角度(图7和图8);或者
-以反对称的方式,即相对于机翼4在相反的方向上倾斜相同的角度(图6和图3)。
参照图3至图8,符号+表示副翼21相对于关联的半翼5上升,而符号-表示副翼21相对于关联的半翼5下降。
除了机翼4以外,航空器1没有尾翼或其他可动翼结构。
换句话说,仅仅通过调节发动机15a和15b的推力以及副翼21的操作来控制航空器1的滚转、俯仰和偏航运动。
替代地,航空器1在巡航位置的滚转运动由前翼13的可动表面控制。
航空器1可以是在机身2上配备有适当设备的无人驾驶飞机。
替代地,机身2可以容纳机组人员。
在未被示出的另一个实施方式中,航空器1可以不包括机身2,而是仅由机翼4构成,并且在需要的情况下由设置在机翼4上的传感器(例如天线或负载)形成。
从起飞状态(图1)开始描述航空器1的操作,其中机身2的Y轴垂直设置并且轮子11和20将航空器1支撑在地面上。
操作发动机15a和15b使航空器1升空。在该阶段,发动机15a和15b抵抗并克服了航空器1的重量的影响,从而能够从地面升起。
然后,航空器1执行第一过渡阶段,在该第一过渡阶段结束时到达巡航位置(图2),在该巡航位置机身2的Y轴相对于垂直方向是倾斜的并在恒定高度飞行的情况下基本上是水平的。
在该阶段,发动机15a和15b抵抗空气阻力,并且机翼4产生保持航空器1飞行所需的升力。
之后,航空器1执行第二过渡阶段,在该第二过渡阶段结束时到达完全类似于起飞位置的降落位置。在该降落位置,机身2的Y轴平行于垂直方向,并且发动机15a和15b抵抗航空器1的重量的影响,从而能够逐渐接近地面。
航空器1的高度逐渐减小,直到降落构件20搁置在地面上,从而使降落操作完成。
在上述飞行阶段中,如下所述控制航空器1。
通过将副翼21保持在中立位置并在发动机15a上设置推力值S1且在发动机15b上设置推力值S2来获得并控制航空器1相对于Z轴的倾斜度,从而在航空器1上获得围绕Z轴的扭矩。重要的是,应注意推力值S1和S2彼此不同(图4和图5)。
航空器1围绕Z轴的倾斜对应于航空器1处于起飞/降落状态时的滚转操作(图5)和航空器1处于巡航位置时的偏航操作(图4)。
通过以对称的方式控制副翼21、即通过使它们同时向上或向下倾斜来获得并控制航空器围绕X轴的倾斜度,从而在航空器1上获得围绕X轴的扭矩(图7和图8)。替代地,这种倾斜可以通过对由前翼13承载的可动表面进行作用来实现。
航空器1围绕X轴的倾斜对应于航空器1处于起飞/降落状态时(图7)以及航空器1处于巡航位置时(图8)的俯仰操作。
航空器1围绕Y轴的倾斜度是通过以反对称的方式倾斜副翼21、即通过使它们中的一个向上倾斜并且使另一个向下倾斜来获得并控制的,从而在航空器1上获得围绕Y轴的扭矩(图3和图6)。
航空器1围绕Y轴的倾斜对应于航空器1处于起飞/降落状态时的偏航操作(图3)和航空器1处于巡航状态时的滚转操作(图6)。
参照图9,附图标记1’表示根据本发明的第一实施方式的尾座式垂直起降飞机。
航空器1’与航空器1相似,并且将仅就区别方面进行描述;在可能的情况下,航空器1’和航空器1的相同和对应的部分将用相同的附图标记表示。
特别地,航空器1’与航空器1的不同之处在于,机翼4包括相对于航空器1的巡航位置而设置在半翼5下方的另外的部分30。
部分30和半翼5在各自的自由端部32和8处通过第一翼段31进行连接。另外,部分30的中央翼段通过沿着X轴介于翼段31之间的翼段33连接至机身2。翼段31和33平行于Z轴延伸。
部分30设置有另外的降落构件20。
航空器1’的操作类似于航空器1的操作,因此不再详细描述。
参照图10和图11,附图标记1”表示根据另一个实施方式的尾座式垂直起降飞机。
航空器1”类似于航空器1,并且在下文中将仅就不同方面进行描述;在可能的情况下,用相同的附图标记表示航空器1”和1的相同和对应的部分。
特别地,航空器1”与航空器1的不同之处在于,该航空器1”:
-包括四个发动机15a、15b、15c和15d,这些发动机设置在半翼5与翼段7之间以及翼段7与部分6之间的相交拐角上;
-不包括副翼21;并且
-不包括前翼13。
特别地,发动机15a、15b、15c和15d的桨毂16的轴线A投射到机翼4的前部翼段C上、半翼5与翼段7之间的相交拐角上以及翼段7与部分6之间的相交拐角上。
换句话说,轴线A沿着机翼4的前部翼段C设置。
发动机15a和15b的桨毂16的轴线A投射到半翼5的相应的端部8处的前部翼段C上。
发动机15c和15d的桨毂16的轴线A投射到机翼4的部分6的端部9处的前部翼段C上。
特别地,发动机15a和15b的桨毂16的轴线A设置在半翼5与翼段7之间的相交拐角上,即设置在相应的半翼5的端部8上。
发动机15c和15d的桨毂16的轴线A设置在翼段7与部分6之间的相交拐角上,即设置在部分6的端部9上。
发动机15a和15b(15c和15d)相对于穿过机身2并与X-Z轴平行且与Y轴正交的平面相应地设置在彼此相对的两侧上。
参照航空器1的巡航状态(图1),发动机15c设置在发动机15a上方,发动机15d设置在发动机15b上方。
发动机15a、15b、15c和15d的桨毂16围绕它们各自的轴线A在彼此不同的旋转方向上旋转。
特别地,发动机15a和15d可以在第一旋转方向上旋转,例如顺时针(逆时针)旋转。发动机15b和15c可以在第二旋转方向上旋转,例如逆时针(顺时针)旋转。
尾座式垂直起降飞机1”的操作与尾座式垂直起降飞机1的不同之处在于,通过在发动机15a和15d上设定第一推力值S1并在发动机15b和15c上设定不同于S1的第二推力值S2来获得并控制围绕Y轴的倾斜度,从而获得作用在航空器1”上的与Y轴平行的扭矩(图15和图16)。
重要的是要注意,当旋翼15a和15d的推力S1增加时,发动机15b和15c的推力S2减小相同的值。这样,在航空器1”上产生的总推力没有改变,而围绕Y轴产生了扭矩,该扭矩引起航空器1”围绕Y轴的旋转。
此外,通过在发动机15a和15c上设定第一推力值S3并在发动机15b和15d上设定不同于S3的第二推力值S4来获得并控制围绕Z轴的倾斜度,从而获得作用在航空器1”上的与Z轴平行的扭矩(图14和图17)。
通过在发动机15a和15b上设定第一推力值S5并在发动机15b和15c上设定不同于S5的第二推力值S6来获得并控制航空器1”围绕X轴的倾斜度,从而获得作用在航空器1”上的与X轴平行的扭矩(图12和图13)。
参照图18和图19,附图标记1”’表示根据另一个实施方式的尾座式垂直起降飞机。
航空器1”’类似于航空器1”,并且在下文中将仅就不同方面进行描述;在可能的情况下,用相同的附图标记表示航空器1”’和航空器1”的相同和对应的部分。
特别地,航空器1”’与航空器1”的不同之处在于,该航空器1”’:
-包括设置在翼段7与部分6之间的相交拐角上的两个发动机15a和15b;并且
-包括设置在机身2的头部10上的另一个发动机15”。
参照图20,附图标记1””表示根据本发明的实施方式的尾座式垂直起降飞机。
航空器1””类似于航空器1”,并且在下文中将仅就不同方面进行描述;在可能的情况下,用相同的附图标记表示航空器1””和航空器1”的相同和对应的部分。
特别地,航空器1””与航空器1”的不同之处在于,机翼4包括另一个部分30,其相对于航空器1的巡航位置设置在半翼5的下方。
部分30和半翼5在各自的自由端部32和8处通过第一翼段31连接。另外,部分30的中央翼段通过沿着X轴介于翼段31之间的翼段33连接至机身2。翼段31和33平行于Z轴延伸。
部分30设置有另外的轮子20。
航空器1””的操作类似于航空器1”的操作,因此不再详细描述。
通过对根据本发明的尾座式垂直起降飞机1’、1””的特性的检查,可以由此获得的优点是明显的。
特别地,机翼4具有闭合的前部翼段C。
这意味着不仅可以提高航空器1’、1””在巡航位置的效率,而且还可以获得仅源于将其应用于尾座式垂直起降飞机1’、1””的以下优点:
-在最大程度上减小航空器1’、1””处于起飞/降落位置时暴露于风中的表面,从而在最大程度上减小起飞/降落阶段中对阵风的敏感性;以及
-由于具有在起飞/降落阶段平行于X轴的尺寸受限的机翼4的必要性,因此满足了几何约束。
另外,航空器1’、1””不需要设置尾翼来确保纵向稳定性。实际上,航空器1””甚至不需要设置前翼13或以对称的方式使用的副翼21,从而能够通过半翼5和部分6的相对定位和翼型来确保纵向稳定性。这能够进一步降低航空器1’、1””的复杂性和重量。
对于航空器1’,副翼21设置为紧邻发动机15a和15b的下游。这样,当航空器1’处于巡航位置时,副翼21受到相应的发动机15a和15b的尾流的撞击。
因此,通过简单地以不同的方式控制发动机15a和15b的推力S1和S2和/或通过使副翼21相对于机翼4在相同或相反的方向上旋转,可以控制航空器1’围绕X-Y-Z轴的旋转。
这导致航空器1’的进一步简化和重量减轻。
对于航空器1””,通过简单地以不同的方式控制发动机15a、15b、15c和15d的推力S1、S2、S3、S4、S5、S6,实现了在巡航位置和起飞/降落位置对围绕X-Y-Z轴的旋转的控制。
因此,航空器1””甚至不如航空器1复杂。
发动机15a和15b、降落构件20和副翼21由机翼4承载。这意味着在航空器1’、1””为无人驾驶的情况下,可以将机身2减至最小,甚至消除机身2,从而获得了复杂性降低的特别轻的航空器1’、1””。
最后,在航空器1’、1””为无人驾驶的情况下,它甚至可以不包括机身2。在这样的情况下,航空器1’、1””将基本上由机翼4和任何设备形成,例如安装在机翼4上的天线或传感器。
航空器1””的发动机15a、15b、15c和15d全部由机翼4承载。结果,机身2不受直接安装在其上的其他发动机产生的振动的直接影响。
在机身2容纳机组人员的情况下,这可以提高机组人员的舒适度。相反,在机身2仅容纳传感器或设备的情况下,这能够使传感器和设备的位置随时间的推移更加稳定。
由于前面已经指出的内容,航空器1’、1””能够将尾座式垂直起降飞机的结构简便性(不需要发动机或旋翼的旋转来进行起飞/降落位置与巡航位置之间的过渡)和实现与飞机相当的巡航速度和性能结合起来。
换句话说,航空器1’、1””能够使尾座式垂直起降飞机的设计方案可用,克服了阻碍其发展的许多缺点。
这在航空器1’、1””为无人驾驶时更加有利。实际上,在这样的情况下,航空器1’、1””甚至不具有尾座式垂直起降飞机在起飞/降落操作期间要求特别不舒适的机组人员位置的不可避免的缺点。
最后,很明显,在不脱离所附权利要求所限定的范围的情况下,可以对本文所述和示出的尾座式垂直起降飞机1’、1””做出修改和变型。
特别地,机翼4可被成形为环形、菱形或多边形。
- 一种尾座式垂直起降飞机人工应急辅助起降操纵控制方法
- 一种分布式推进尾座式垂直起降固定翼飞行器