把持装置和机器人装置
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及把持装置和机器人装置。
背景技术
专利文献1和专利文献2公开了一种把持工件的把持装置。专利文献3公开了一种利用挤压转移的机器人的接地部构造。专利文献4和专利文献5公开了一种利用所谓的挤压转移的把持装置。
专利文献1:日本特许第6010408号公报
专利文献2:日本特许第5822110号公报
专利文献3:日本特许第5900838号公报
专利文献4:日本特表2013-523478号公报
专利文献5:日本特开2018-27578号公报
发明内容
期望提高利用挤压转移的把持装置的把持力。
本发明的一技术方案的把持装置可以具有第1袋部,该第1袋部收纳磁性体,把持物体,且能够变形。把持装置可以具有第2袋部,该第2袋部收纳磁性体,把持物体,且能够变形。把持装置可以具有气体控制部,该气体控制部通过从第1袋部和第2袋部内排出气体或者向第1袋部和第2袋部内供给气体,来控制第1袋部和第2袋部的形状。把持装置可以具有磁场控制部,该磁场控制部使收纳于第1袋部的磁性体磁化为一个极性,使收纳于第2袋部的磁性体磁化为另一个极性。可以利用第1袋部和第2袋部保持物体。第1袋部和第2袋部可以通过挤压转移来把持物体。第1袋部和第2袋部可以由挠性材料构成。
把持装置可以具有保持部,该保持部将第1袋部和第2袋部并列地保持。保持部可以将第1袋部和第2袋部空开预先规定的间隔地保持。
保持部可以具有主体、从主体的一端向一方向延伸的第1臂部以及从主体的另一端向一方向延伸的第2臂部。第1袋部可以设于第1臂部的端部。第2袋部可以设于第2臂部的端部。主体、第1臂部以及第2臂部可以一体地构成,形成为字母U字形状。
保持部可以是轭铁。把持装置可以具有围绕主体的周围的线圈。磁场控制部可以通过使电流流经线圈,使收纳于第1袋部的磁性体磁化为一个极性,使收纳于第2袋部的磁性体磁化为另一个极性。
保持部可以是第1轭铁。把持装置可以具有第1线圈,该第1线圈围绕第1臂部的周围。把持装置可以具有第2线圈,该第2线圈围绕第2臂部的周围。磁场控制部可以通过使电流流经第1线圈,使收纳于第1袋部的磁性体磁化为一个极性。磁场控制部可以通过使电流流经第2线圈,使收纳于第2袋部的磁性体磁化为另一个极性。第1线圈和第2线圈可以分别相对于第1臂部和第2臂部向同一方向卷绕。磁场控制部可以使电流朝向第1方向地流经第1线圈,使电流朝向与第1方向相反的第2方向地流经第2线圈。
把持装置可以具有第2轭铁,该第2轭铁包围第1臂部的第1线圈的外侧,具有使第1袋部暴露的开口。把持装置可以具有第3轭铁,该第3轭铁包围第2臂部的第2线圈的外侧,具有使第2袋部暴露的开口。第2轭铁可以具有第1圆筒和从第1圆筒延伸的第1顶端部分。第3轭铁可以具有第2圆筒和从第2圆筒延伸的第2顶端部分。第1顶端部分和第2顶端部分可以是顶端变细的形状。第2轭铁可以在第1顶端部分具有使第1袋部暴露的开口。第3轭铁可以在第2顶端部分具有使第2袋部暴露的开口。
第1袋部可以是以使第1臂部的另一端暴露的方式包围第1臂部的环形状。第2袋部可以是以使第2臂部的另一端暴露的方式包围第2臂部的环形状。
把持装置可以具有第3袋部,该第3袋部收纳磁性体,把持物体,且能够变形。保持部可以以第2袋部位于第1袋部与第3袋部之间的方式保持第2袋部,将第1袋部、第2袋部以及第3袋部并列地保持。气体控制部可以通过从第3袋部内吸引气体或者向第3袋部内注入气体,来控制第3袋部的形状。磁场控制部可以将收纳于第3袋部的磁性体磁化为一个磁性。
保持部可以具有第1磁体,该第1磁体使收纳于第1袋部的磁性体磁化为一个磁性。保持部可以具有第2磁体,该第2磁体使收纳于第2袋部的磁性体磁化为另一个磁性。保持部可以具有移动机构,该移动机构以第1磁体能够在相对于第1袋部靠近的方向和远离的方向上移动的方式支承第1磁体,且以第2磁体能够在相对于第2袋部靠近的方向和远离的方向上移动的方式支承第2磁体。第1磁体和第2磁体可以是永磁体。移动机构可以是气缸。
可以是,磁场控制部控制移动机构,使第1磁体靠近第1袋部,使第2磁体靠近第2袋部,从而使收纳于第1袋部的磁性体磁化为一个极性,使收纳于第2袋部的磁性体磁化为另一个极性。
磁性体可以包含铁球。
铁球可以是多面体。铁球可以是12面体、20面体、32面体或者64面体。铁球的直径可以是3.0mm、4.0mm或者4.5mm以上。第1袋部、第2袋部以及第3袋部中的至少一者除了收纳铁球之外,还收纳粉末状的磁性体。
本发明的一技术方案的机器人装置可以具有机械臂,该机械臂具有上述把持装置。
此外,上述的发明的概要并没有列举本发明所需的所有特征。另外,这些特征群的子组合也能够另外成为发明。
附图说明
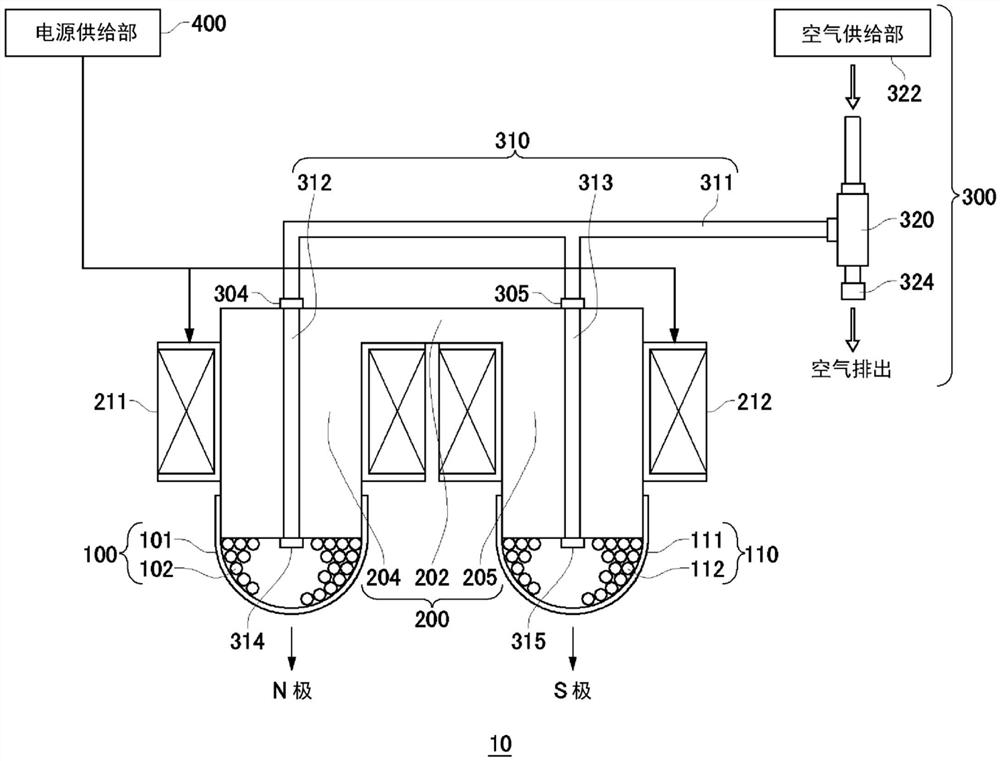
图1是示意性地示出实施方式的把持装置的整体结构的图。
图2是示意性地示出第1变形例的把持装置的整体结构的图。
图3是示意性地示出第2变形例的把持装置的整体结构的图。
图4是示意性地示出第3变形例的把持装置的整体结构的图。
图5A是示出第4变形例的把持装置的示意图的图。
图5B是从顶端侧观察图5A所示的把持部得到的示意图。
图6是示出第5变形例的把持部的示意图的图。
图7是示意性地示出其他实施方式的把持装置的整体结构的图。
图8是具有把持装置的机器人装置的示意图。
图9是示出利用图1所示的把持装置把持铁板的情况下的情形的图。
图10是示出利用比较对象的两个物体把持装置把持铁板的情况下的情形的图。
图11是示出如图9所示利用把持装置把持铁板的情况下的磁通密度分布的一个例子的图。
图12是示出如图10所示利用两个物体把持装置把持铁板的情况下的磁通密度分布的一个例子的图。
具体实施方式
以下通过发明的实施方式来说明本发明,但以下的实施方式不会对权利要求书的技术方案进行限定。另外,在实施方式中说明的特征的所有组合对于发明的解决方案而言也不是必须的。
图1是示意性地示出实施方式的把持装置10的整体结构的图。把持装置10利用所谓的挤压转移来把持物体。把持装置10可以把持由钢板等软磁性材料构成的工件来作为物体。
把持装置10具有把持部100、把持部110、保持部200、线圈211、线圈212、气体控制部300以及电源供给部400。把持部100、把持部110、保持部200、线圈211以及线圈212示意性地在剖视图中示出。
把持部100具有袋部101和铁球102。袋部101由收纳铁球102的袋状的能够变形的材料构成。把持部110具有袋部111和铁球112。袋部111由收纳铁球112的袋状的能够变形的材料构成。袋部101和袋部111可以由硅橡胶、弹性体等挠性材料构成。袋部101收纳多个铁球102。袋部111收纳多个铁球112。铁球102和铁球112是磁性体的一个例子。铁球102和铁球112可以是球体或者多面体。铁球102和铁球112可以是12面体、20面体、32面体或者64面体等。铁球102和铁球112的直径可以是3.0mm、4.0mm或者4.5mm以上。袋部101是第1袋部的一个例子。袋部111是第2袋部的一个例子。袋部101和袋部111除了收纳铁球102和铁球112之外,还可以收纳铁粉等粉末状的磁性体。
保持部200将袋部101和袋部111并列地保持。保持部200可以将袋部101和袋部111空开预先规定的间隔地保持。保持部200具有主体202和从主体202的一端向一方向延伸的臂部204以及从主体202的另一端向一方向延伸的臂部205。臂部204是第1臂部的一个例子。臂部205是第2臂部的一个例子。保持部200是轭铁。主体202、臂部204以及臂部205可以一体地构成并形成为字母U字形状。袋部101可以设于臂部204的端部。袋部101可以设为覆盖臂部204的端部。袋部111可以设于臂部205的端部。袋部111可以设为覆盖臂部205的端部。
气体控制部300通过从袋部101和袋部111内排出气体或者向袋部101和袋部111内供给气体,对袋部101和袋部111的形状进行控制。气体控制部300具有真空产生器320、空气供给部322、空气排气部324以及配管310。配管310包括主配管311、支配管312以及支配管313。在主配管311的一端连接有真空产生器320。主配管311分支而与支配管312和支配管313相连接。主配管311可以借助接头304与支配管312相连接。主配管311可以借助接头305与支配管313相连接。接头304和接头305可以固定于保持部200的外表面。
支配管312和支配管313可以配置于保持部200的内部。支配管312可以配置于在构成臂部204的轭铁中贯通的贯通孔内。支配管313可以配置于在构成臂部205的轭铁中贯通的贯通孔内。支配管312的端部从臂部204的端部暴露。在支配管312的端部配置有比铁球102的直径小的网格状的过滤器314。支配管313的端部从臂部205的端部暴露。在支配管313的端部配置有过滤器315,该过滤器315具有防止铁球112向支配管313内进入的构造。过滤器315例如可以是比铁球112的直径小的网格状的过滤器。过滤器315也可以由1个以上的棒状构件构成。
真空产生器320经由配管310吸引袋部101和袋部111内的气体,并从空气排气部324排出气体(空气)。真空产生器320可以将袋部101和袋部111内设为真空状态。通过吸引袋部101和袋部111内的气体,袋部101内的铁球102彼此紧贴,袋部111内的铁球112彼此紧贴。通过所谓的挤压转移,铁球102间和铁球112间的间隙变少,铁球102和铁球112变得无法移动。由此,多个铁球102和铁球112作为一块固体进行动作。
例如,将袋部101和袋部111向工件按压,将袋部101和袋部111的形状设为与工件的形状相对应的形状,然后,气体控制部300将袋部101和袋部111内的气体排出,从而能够将袋部101和袋部111的形状固定化为与工件的形状相对应的形状。另一方面,真空产生器320借助空气供给部322向袋部101和袋部111内供给气体(空气)。由此,在铁球102间和铁球112间产生间隙,袋部101内的铁球102和袋部111内的铁球112容易移动。袋部101和袋部111的形状容易变化。通过真空产生器320对袋部101和袋部111内的气体的排出和供给进行控制,能够使袋部101和袋部111硬化或软化。
利用挤压转移,将袋部101和袋部111的形状与把持对象的物体的形状相对应地固定化,从而容易利用袋部101和袋部111把持物体。但是,例如在物体的重量较大的情况下,若仅通过将袋部101和袋部111的形状与把持对象的物体的形状相对应地固定化,则把持力较弱,有时无法利用袋部101和袋部111可靠地把持物体。
因此,在本实施方式中,使袋部101内的铁球102和袋部111内的铁球112磁化,通过磁力来增加袋部101和袋部111的把持力。
线圈211设于臂部204的周围。线圈212设于臂部205的周围。线圈211和线圈212可以分别相对于臂部204和臂部205向同一方向卷绕。电源供给部400向线圈211和线圈212供给电力。通过电流流经线圈211和线圈212,产生磁场。电源供给部400使电流朝向第1方向地流经线圈211,使电流朝向与第1方向相反的第2方向地流经线圈212。线圈211和线圈212可以分别相对于臂部204和臂部205向不同的方向卷绕。在该情况下,电源供给部400可以使电流朝向同一方向地流经线圈211和线圈212。由此,电源供给部400使收纳于袋部111中的铁球102磁化为一个极性(例如N极),使收纳于袋部111的铁球112磁化为另一个极性(例如S极)。电源供给部400是磁场控制部的一个例子。
这样,通过使袋部101内的铁球102和袋部111内的铁球112磁化为不同的极性,能够使在袋部101和袋部111产生的磁力集中于由袋部101和袋部111把持的物体。因而,能够提高袋部101和袋部111的把持力。
图2是示意性地示出第1变形例的把持装置10的整体结构的图。第1变形例的把持装置10在袋部101和袋部111分别具有另外的轭铁206和轭铁207,在这一点上,与图1所示的把持装置10不同。对于图2所示的把持装置10所具有的各部中的、具有与图1所示的把持装置10所具有的各部共通的功能的各部,标注相同的附图标记,省略说明。
线圈211设于轭铁206的周围。线圈212设于轭铁207的周围。支配管312可以配置于在轭铁206中贯通的贯通孔内。支配管313可以配置于在轭铁207中贯通的贯通孔内。轭铁206和轭铁207可以分别由另外的臂等保持机构保持。保持机构可以将轭铁206和轭铁207之间的相对位置变更为任意的位置。例如可以是,袋部101的顶端部分和袋部111的顶端部分相对地配置,袋部101和袋部111以夹持物体的方式把持物体。另外,保持机构可以与物体的形状等相应地调整轭铁206和轭铁207的间隔。
在这样构成的把持装置10中,可以通过电源供给部400使电流流经线圈211和线圈212来将收纳于袋部111的铁球102磁化为一个极性(例如N极),将收纳于袋部111的铁球112磁化为另一个极性(例如S极)。由此,能够使在袋部101和袋部111产生的磁力集中于由袋部101和袋部111把持的物体。因而,能够提高袋部101和袋部111的把持力。
图3是示意性地示出第2变形例的把持装置10的整体结构的图。第2变形例的把持装置10兼用作使袋部101内的铁球102磁化的线圈和使袋部111内的铁球112磁化的线圈,在这一点上,与图1所示的把持装置10不同。对于图3所示的把持装置10所具有的各部中的、具有与图1所示的把持装置10所具有的各部共通的功能的各部,标注相同的附图标记,省略说明。
把持装置10具有围绕保持部200的主体202的周围的线圈210。通过电源供给部400使电流流经线圈210,产生磁场,能够使收纳于袋部111的铁球102磁化为一个极性(例如N极),使收纳于袋部111的袋部111磁化为另一个极性(例如S极)。
通过兼用作使袋部101内的铁球102磁化的线圈和使袋部111内的铁球112磁化的线圈,与不兼用的情况相比,能够使把持装置10轻量化和小型化。
图4是示意性地示出第3变形例的把持装置10的整体结构的图。第3变形例的把持装置10具有3个臂部和3个袋部,在这一点上,与上述的把持装置10不同。对于具有与图1所示的把持装置10所具有的各部共通的功能的各部,标注相同的附图标记,省略说明。
把持装置10除了具有把持部100、把持部110之外,还具有把持部120。保持部200将把持部100、把持部110以及把持部120并列地保持。把持部120具有袋部121和铁球122。袋部121由收纳铁球122的袋状的、能够变形的材料构成。袋部121可以由硅橡胶、弹性体等挠性材料构成。袋部121与袋部101和袋部111同样地,除了收纳铁球122之外,还可以收纳铁粉等粉末状的磁性体。
保持部200具有主体202、臂部221、臂部222以及臂部223。臂部221从主体202的一个端部延伸。臂部223从主体202的另一个端部延伸。臂部222从主体202的一个端部和另一个端部之间延伸。主体202、臂部221、臂部222以及臂部223可以是一体地构成的轭铁。臂部222可以比臂部221和臂部223粗。在臂部221的端部安装有袋部101,在臂部222的端部安装有袋部111,在臂部223的端部安装有袋部121。安装于臂部222的袋部111的铁球的收纳量可以比袋部101和袋部121的收纳量大。
配管310除了具有主配管311、支配管312、支配管313之外,还具有支配管316。支配管312设于在构成臂部221的轭铁中贯通的贯通孔内。支配管313设于在构成臂部222的轭铁中贯通的贯通孔内。支配管316设于在构成臂部223的轭铁中贯通的贯通孔内。真空产生器320经由配管310吸引袋部101、袋部111以及袋部121内的气体,从空气排气部324排出气体(空气)。真空产生器320可以将袋部101、袋部111以及袋部121内设为真空状态。
线圈210配置于臂部222的周围。电源供给部400使收纳于袋部101的铁球102磁化为一个极性(例如S极),使收纳于袋部111的铁球112磁化为另一个极性(例如N极),并且使收纳于袋部121的铁球122磁化为一个磁性(例如S极)。
把持装置10具有磁化的3个袋部,能够根据把持对象的物体的形状,更稳定地把持物体。
图5A是第4变形例的把持装置10的示意图。图5B是从顶端侧观察图5A所示的把持部100的示意图。第4变形例的把持装置10的袋部101和袋部111的形状与图1所示的把持装置10的袋部101和袋部111的形状不同。另外,在第4变形例的把持装置10中,支配管312和支配管313设于保持部200的外部,在这一点上,与图1所示的把持装置10不同。
对于图5A所示的把持装置10所具有的各部中的、具有与图1所示的把持装置10所具有的各部共通的功能的各部,标注相同的附图标记,省略说明。此外,线圈211和线圈212也可以与图3所示的把持装置10同样地,由1个线圈构成。
袋部101可以是以使作为轭铁的臂部204的顶端暴露的方式包围臂部204的环形状。袋部111可以是以使作为轭铁的臂部205的顶端暴露的方式包围臂部205的环形状。即,袋部101和袋部111可以是甜甜圈形状。通过将袋部101和袋部111的形状设为这样的形状,能够使轭铁的顶端直接与把持对象的物体相接触。通过使轭铁直接与物体相接触,相对于物体的磁力增加,能够增加把持部100的把持力。
图6是示出把持装置10所具有的把持部100的第5变形例的示意图。把持装置10在作为保持袋部101的轭铁的保持部200的周围具有线圈211。并且,把持装置10具有其他轭铁600,该轭铁600包围线圈211的外侧,具有使袋部101暴露的开口602。轭铁600的开口602的周围被磁化为与袋部101的磁性相反的磁性。轭铁600可以形成为圆筒形状。在轭铁600的内部可以配置有保持部200和袋部101。轭铁600可以具有圆筒和从圆筒延伸的顶端部分。顶端部分可以是顶端变细的形状。轭铁600可以在顶端部分具有开口602。通过把持装置10在线圈211的外侧还具有轭铁600,能够增加把持部100的磁力,能够进一步增加把持部100的把持力。此外,把持装置10可以还具有其他轭铁,该其他轭铁包围线圈212的外侧,具有使袋部111暴露的开口。
图7是示意性地示出其他实施方式的把持装置10的整体结构的图。其他实施方式的把持装置10具有永磁体251和永磁体252来替代电磁体,在这一点上,与上述的把持装置10不同。通过使永磁体251靠近把持部100,使袋部101内的铁球102磁化为一个磁性(例如N极),通过使永磁体252靠近把持部110,使袋部111内的铁球112磁化为另一个磁性(例如S极)。
把持装置10具有气缸500。气缸500具有主体502、活塞杆504以及安装部506。在安装部506安装有永磁体251和永磁体252。以永磁体251的一个磁极(例如N极)朝向把持部100侧的方式将永磁体251安装于安装部506。以永磁体252的另一个磁极(例如S极)朝向把持部110侧的方式将永磁体252安装于安装部506。
主体502在内部具有缸体和活塞。活塞杆504与活塞相连结,借助安装部506使永磁体251和永磁体252在相对于袋部101和袋部111靠近的方向和远离的方向上移动。气缸500是移动机构的一个例子。
气缸500通过使永磁体251和永磁体252靠近袋部101和袋部111,使袋部101内的铁球102磁化为一个磁性,使袋部111内的铁球112磁化为另一个磁性。气缸500通过使永磁体251和永磁体252远离袋部101和袋部111,减弱袋部101内的铁球102、袋部111内的铁球112的磁化。即,气缸500通过使永磁体251和永磁体252靠近袋部101和袋部111,增加袋部101和袋部111的把持力。气缸500通过使永磁体251和永磁体252远离袋部101和袋部111,减少袋部101和袋部111的把持力。
根据其他实施方式的把持装置10,通过使用永磁体来替代电磁体,不需要对线圈供给电力的电源。
图8是表示具有把持装置10的机器人装置800的一个例子的示意图。机器人装置800具有作为多关节的机器人的机械臂810和安装于机械臂810的顶端的把持装置10。机械臂810是多个连杆构件利用关节连结起来的构件,机械臂810的基端固定于基台820。
机器人装置800所具有的把持装置10能够可靠地把持重量比较大的、多种形状的物体。
安装于如上述那样的机器人装置800的机械臂810的把持装置为爪式的机械手的情况下,需要与把持对象的物体的形状相应地将机械手更换。但是,根据上述的实施方式和变形例的把持装置10,不必与把持对象的物体的形状相应地将机械手更换。
另外,在把持装置不利用磁力而仅利用挤压功能把持物体的情况下,有可能把持装置无法把持重量较大的物体。因此,为了增加把持装置的把持力,除了挤压功能之外,还可以考虑将空气式吸附功能搭载于把持装置。但是,根据这样的把持装置,需要分别独立地进行挤压用的减压和空气式吸附用的减压,把持装置对把持对象的物体进行的把持需要时间。因而,在进行这样的把持装置的情况下,有可能生产率下降。
相对于此,根据上述的实施方式和变形例的把持装置10,把持装置10具有多个袋部,将各个袋部内的铁球等磁性体交替地磁化为不同的磁性。由此,能够增加相对于把持对象的物体的磁力,能够增加把持力。并且,由于仅利用挤压用的减压即可,因此,能够缩短把持装置10对把持对象的物体进行的把持所需的时间。
图9示出利用图1所示的把持装置10把持铁板900(尺寸:300mm×300mm,厚度2.3mm,材料:SS400钢材)的情况下的情形。图10示出利用两个物体把持装置700把持铁板900(尺寸:300mm×300mm,厚度2.3mm,材料:SS400钢材)的情况下的情形。物体把持装置700具有挠性的袋部701、收纳于袋部701的铁球702、保持袋部701的圆板状的板703、对袋部701内进行吸引的吸引部件以及配置于板703的与袋部701相反的一侧的电磁体部710。电磁体部710具有铁芯部711、配置于铁芯部711的周围的线圈部712以及围绕线圈部712部的周围的磁轭部713。并且,两个物体把持装置700各自的线圈部712被磁化为一个磁性(例如N极),两个物体把持装置700各自的磁轭部713被磁化为另一个磁性(例如S极)。
在图11中,作为如图9所示把持铁板的情况下的、由株式会社JSOL的JMAG(注册商标)等电磁场分析软件进行的模拟的结果,示出磁通密度分布。该情况下的吸附力为10.6kg。在图12中,作为如图10所示把持铁板的情况下的、由上述的电磁场分析软件进行的模拟的结果,示出磁通密度分布。该情况下的吸附力为3.8kg。即,由图9所示的把持装置10产生的吸附力为由图10所示的物体把持装置700产生的吸附力的大约2.8倍。
根据图10所示的物体把持装置700,由于袋部701内的铁球702使S极、N极以及S极的磁路短路,因此,无法向对象物施加充分的吸附力。另外,根据图10所示的物体把持装置700,由于在铁芯部711与袋部701之间配置有板703,因此,难以将来自电磁体部710的磁力向对象物传递。另一方面,根据图9所示的把持装置10,由于N极和S极的磁极分离,因此,能够借助对象物构成磁路,能够增加吸附力。另外,根据图9所示的把持装置10,由于轭铁与袋部直接接触,因此,能够高效地将来自轭铁的磁力向对象物传递。
以上使用实施方式说明了本发明,但本发明的技术范围并不限定于上述实施方式所述的范围。本领域技术人员能够明确的是,能够对上述实施方式施加多种变更或改良。根据权利要求书的记载可知,施加了这样的变更或者改良的方式也能够包含在本发明的技术范围内。
关于在权利要求书、说明书以及附图中示出的装置、系统、程序以及方法中的动作、次序、步骤以及阶段等各处理的执行顺序,应该留意的是,只要没有特别明示“之前”、“预先”等,另外不是将之前的处理的输出用于之后的处理的情况,就能够以任意的顺序实现。关于权利要求书、说明书以及附图中的动作流程,即使为了方便而使用“首先”、“接着”等进行了说明,也并不意味着必须以该顺序实施。
10、把持装置;100、110、120、把持部;101、111、袋部;102、112、122、铁球;200、保持部;202、主体;204、205、221、222、223、臂部;206、207、轭铁;210、211、212、线圈;251、252、永磁体;300、气体控制部;304、305、接头;310、配管;311、主配管;312、313、316、支配管;314、315、过滤器;320、真空产生器;322、空气供给部;324、空气排气部;400、电源供给部;500、气缸;502、主体;504、活塞杆;506、安装部;600、轭铁;602、开口;800、机器人装置;810、机械臂;820、基台。
- 把持装置以及具备该把持装置的机器人装置
- 把持装置、机器人以及把持方法