三维显示装置、平视显示器、移动体以及程序
文献发布时间:2023-06-19 11:11:32
对关联申请的交叉引用
本申请主张2018年11月2日申请的日本专利申请2018-207539号的优先权,为了参照而将该在先申请的公开整体援引于此。
技术领域
本公开涉及三维显示装置、平视显示器、移动体以及程序。
背景技术
以往,为了不使用眼镜而进行三维显示,已知一种三维显示装置,具备光学元件,该光学元件使从显示面板出射的光的一部分到达右眼,并使从显示面板出射的光的另一部分到达左眼(参照专利文献1)。
在先技术文献
专利文献
专利文献1:日本特开2001-166259号公报
发明内容
本公开的三维显示装置具备显示面板、光学元件、通信模块和控制器。所述显示面板搭载于移动体,并构成为显示视差图像。所述光学元件构成为规定来自所述显示面板的图像光的传播方向。所述通信模块构成为接收表示所述移动体的运动的参数的运动信号。所述控制器构成为基于所述运动信号表示的所述参数,使所述显示面板显示所述视差图像。
本公开的平视显示器具备三维显示装置和光学构件。所述三维显示装置具备显示面板、光学元件、通信模块和控制器。所述显示面板搭载于移动体,并构成为显示视差图像。所述光学元件构成为规定来自所述显示面板的图像光的传播方向。所述通信模块构成为接收表示所述移动体的运动的参数的运动信号。所述控制器构成为基于所述运动信号表示的所述参数,使所述显示面板显示所述视差图像。所述光学构件构成为使从所述三维显示装置射出的图像光反射,并到达利用者的眼睛。
本公开的移动体具备平视显示器。平视显示器具备三维显示装置和光学构件。所述三维显示装置具备显示面板、光学元件、通信模块和控制器。所述显示面板构成为显示视差图像。所述光学元件构成为规定来自所述显示面板的图像光的传播方向。所述通信模块构成为接收表示所述移动体的运动的参数的运动信号。所述控制器构成为基于所述运动信号表示的所述参数,使所述显示面板显示所述视差图像。所述光学构件构成为使从所述三维显示装置射出的图像光反射,并到达利用者的眼睛。
本公开的程序是用于搭载于移动体的三维显示装置执行的程序。所述三维显示装置具备显示面板、光学元件、通信模块和控制器。所述光学元件规定从所述显示面板射出的图像光的传播方向。所述控制器使所述通信模块接收表示所述移动体的运动的参数的运动信号。所述控制器基于所述参数,使所述显示面板显示视差图像。
附图说明
图1是示出搭载于移动体的通信平视显示器系统的例子的图。
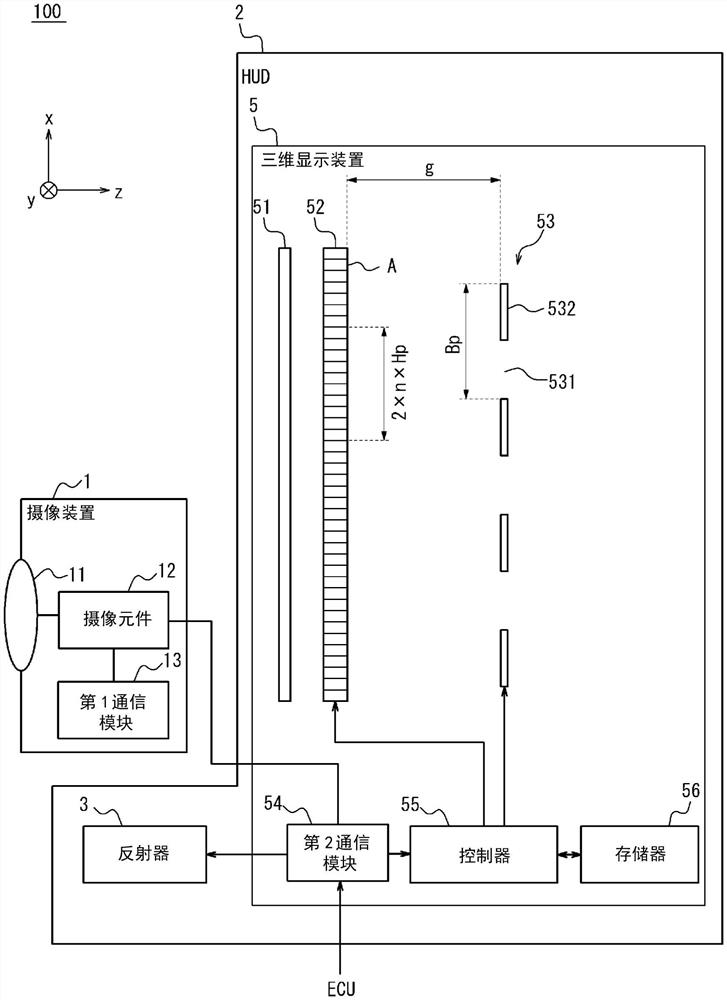
图2是示出图1所示的通信平视显示器系统的概略结构的图。
图3是示出从深度方向观察图2所示的显示面板的例子的图。
图4是示出从深度方向观察图2所示的视差屏障的例子的图。
图5是用于说明图1所示的虚像与利用者的眼睛的关系的图。
图6A是示出利用者的眼睛的位置向水平方向的变化的图。
图6B是示出身高比图6A所示的利用者矮的利用者的眼睛的位置向水平方向的变化的图。
图7是示出变化前后的眼间方向的眼睛的位置与可视区域的关系的图。
图8是用于说明高度方向相对于重力方向偏离的情况下的眼睛的位置的变化的图。
图9A是示出利用者的眼睛的位置向前后方向的变化的图。
图9B是示出身高比图9A所示的利用者矮的利用者的眼睛的位置向前后方向的变化的图。
图10是示出变化前后的前后方向的眼睛的位置与可视区域的关系的图。
图11是示出使用了推定方式的控制器的处理流程的一个例子的流程图。
图12是示出使用了实测验证方式的控制器的处理流程的一个例子的流程图。
图13是示出利用者对显示面板进行直接视认的情况下的三维显示装置与利用者的眼睛的位置关系的图。
图14是将光学元件设为凸透镜的情况下的三维显示装置的概略结构图。
具体实施方式
希望图像光分别适当地到达利用者的双眼,利用者对由三维显示装置显示的三维图像或该三维图像的虚像适当地进行视认。
本公开提供利用者能够对三维图像或该三维图像的虚像适当地进行视认的三维显示装置、平视显示器系统、通信设备、移动体以及程序。
以下,参照附图对本公开的一个实施方式进行说明。另外,以下的说明中使用的图是示意性的图,附图上的尺寸比率等不一定与现实一致。
如图1所示,本公开的一实施方式涉及的通信平视显示器(HUD:Head Up Display)系统100可以搭载于移动体20。
本公开中的“移动体”中包括车辆、船舶、航空机。本公开中的“车辆”中包含汽车以及工业车辆,但是并不限于此,可以包括铁道车辆以及生活车辆、行驶滑行路的固定翼机。汽车包括乘用车、卡车、巴士、二轮车以及无轨电车等但并不限于此,可以包括在道路上行驶的其他车辆。工业车辆包括面向农业以及建设的工业车辆。工业车辆中包括叉车以及高尔夫车,但并不局限于此。面向农业的工业车辆中包含拖拉机、耕耘机、移植机、割捆机(binder)、联合收割机以及割草机,但并不限于此。面向建设的工业车辆中包括公牛推土机、铲土机(scraper)、挖土机、起重机车、翻斗车以及压路机,但并不限于此。车辆包括通过人力而行驶的车辆。另外,车辆的分类并不限于上述。例如,汽车中可以包括可在道路行驶的工业车辆,可以在多个分类中包括相同的车辆。本公开中的船舶中包括海上喷气机、船只、油轮。本公开中的航空机中,包括固定翼机和旋转翼机。
通信HUD系统100可以具备摄像装置1和平视显示器(HUD:Head Up Display)2。
摄像装置1配置为在摄像范围中包括利用者的脸。在通信HUD系统100搭载于移动体20的情况下,摄像装置1可以安装于后视镜。摄像装置1可以安装于仪表板内的例如仪表组。摄像装置1可以安装于中控板。摄像装置1可以安装于方向盘的支撑部。
如图2所示,摄像装置1包括摄像光学系统11、摄像元件12和第1通信模块13。
摄像光学系统11构成为包括1个以上的透镜。摄像光学系统11配置为光轴成为与摄像元件12的摄像面垂直。摄像光学系统11构成为使从被摄体入射的光在摄像元件12中成像为被摄体像。
摄像元件12例如可以包括CCD(Charge Coupled Device,电荷耦合器件)摄像元件或CMOS(Complementary Metal Oxide Semiconductor,互补金属氧化物半导体)摄像元件。摄像元件12构成为通过对由摄像光学系统11成像的像进行变换来生成摄像图像。
第1通信模块13构成为能够与HUD2通信。例如,第1通信模块13将由摄像元件12生成的摄像图像发送到HUD2。在第1通信模块13和HUD2的通信中使用的通信方式可以是近距离无线通信标准或向便携式电话网连接的无线通信标准,也可以是有线通信标准。近距离的无线通信标准例如可以包括WiFi(注册商标)、Bluetooth(注册商标)、红外线、NFC(NearField Communication,近场通信)等。向便携式电话网连接的无线通信标准例如可以包括LTE(Long Term Evolution)、第4代移动通信系统或第5代移动通信系统等。
如图1所示,HUD2可以包括反射器3、光学构件4和三维显示装置5。
反射器3构成为使从三维显示装置5射出的图像光朝向光学构件4的给定区域反射。给定区域是在该给定区域反射的图像光朝向利用者的眼睛的区域。给定区域可以根据利用者的眼睛相对于光学构件4的方向、以及图像光向光学构件4的入射方向而决定。反射器3包括1个以上的反射元件。
反射元件分别可以是反射镜。在反射元件是反射镜的情况下,例如可以将反射镜设为凹面镜。在图1中,反射器3作为1个反射镜而进行了显示。然而,不限于此,反射器3可以作为1个以上的反射镜而构成。
光学构件4构成为使从三维显示装置5射出且由反射器3反射的图像光朝向利用者的左眼(第1眼)以及右眼(第2眼)反射。例如,移动体20的风挡可以兼用为光学构件4。因此,HUD2构成为沿着光路L使从三维显示装置5射出的光行进到利用者的左眼以及右眼为止。利用者可以将沿着光路L到达的光作为虚像V来进行视认。
如图2所示,三维显示装置5能够包括照射器51、显示面板52、作为光学元件的视差屏障53、第2通信模块54、控制器55和存储器56。在HUD2搭载于移动体20的结构中,三维显示装置5可以收容于移动体20的仪表盘。
照射器51可以对显示面板52进行面照射。照射器51可以包括光源、导光板、扩散板、扩散片等。照射器51构成为通过光源出射照射光,并通过导光板、扩散板、扩散片等将照射光在显示面板52的面方向上均匀化。照射器51能够构成为向显示面板52出射被均匀化了的光。
显示面板52例如可以采用透射型的液晶显示面板等显示面板。作为显示面板52,不限于透射型的液晶面板,可以使用有机EL等其他显示面板。在使用自发光型的显示面板作为显示面板52的情况下,三维显示装置5可以不具备照射器51。设显示面板52为液晶面板来进行说明。
如图3所示,显示面板52在面状地形成的有效区域A上具有多个划分区域。有效区域A构成为显示视差图像。视差图像包括后述的左眼图像(第1图像)和相对于左眼图像具有视差的右眼图像(第2图像)。划分区域是沿第1方向以及与第1方向正交的第2方向划分的区域。与第1方向以及第2方向正交的方向也被称为第3方向。第1方向可以被称为水平方向。第2方向可以被称为铅垂方向。第3方向可以被称为深度方向。然而,第1方向、第2方向以及第3方向分别不限于此。在图2至图4、图13以及图14中,将第1方向表示为x轴方向,将第2方向表示为y轴方向,将第3方向表示为z轴方向。在图1、图5至图10中,沿着穿过利用者的左眼以及右眼的直线的方向即眼间方向被表示为u轴方向,利用者的前后方向被表示为v轴方向,并且与u轴方向以及v轴方向垂直的高度方向被表示为w轴方向。
在划分区域的每一个对应1个子像素。因此,有效区域A具备沿着水平方向以及铅垂方向格子状地排列的多个子像素。
各子像素对应于R(Red,红)、G(Green,绿)、B(Blue,蓝)中的任意颜色,能够将R、G、B这3个子像素作为一组而构成1个像素。1个像素可以被称为1个像素点。作为显示面板52,不限于透射型的液晶面板,可以使用有机EL等其他显示面板。在使用自发光型的显示面板作为显示面板52的情况下,三维显示装置5可以不具备照射器51。
在有效区域A排列的多个子像素构成子像素组Pg。子像素组Pg在水平方向被反复地排列。子像素组Pg能够在铅垂方向上在相同的位置处排列以及错开地排列。例如,子像素组Pg能够在铅垂方向上,与在水平方向上错开1个子像素的量的位置相邻而反复地排列。子像素组Pg包括给定行以及列的子像素。例如,子像素组Pg包括在铅垂方向上b个(b行)、在水平方向上2×n个(2×n列)、连续地排列的(2×n×b)个子像素P1~P(2×n×b)。在图3所示的例子中,n=6,b=1。在有效区域A配置包括在铅垂方向上1个、在水平方向上12个、连续地排列的12个子像素P1~P12的子像素组Pg。在图3所示的例子中,对一部分的子像素组Pg标注符号。
子像素组Pg是后述的控制器55进行用于使图像显示的控制的最小单位。子像素组Pg所包括的各子像素通过识别信息P1~p(2×n×b)来识别。所有子像素组Pg的具有相同的识别信息的子像素P1~p(2×n×b)可以由控制器55实质上同时地控制。例如,控制器5在将使子像素P1显示的图像从左眼图像切换为右眼图像的情况下,将使所有子像素组Pg中的子像素P1显示的图像从左眼图像同时地切换为右眼图像。
视差屏障53可以如图2所示,利用沿着有效区域A的平面而形成。视差屏障53距有效区域A隔着给定距离而配置。视差屏障53可以相对于显示面板52而位于照射器51的相反侧。视差屏障53可以位于显示面板52的照射器51侧。
视差屏障53构成为如图4所示,针对每个作为在面内的给定方向上延伸的多个带状区域的透光区域531,规定从子像素射出的图像光的传播方向。例如,视差屏障53具有多个使图像光减光的减光区域532。多个减光区域532划定互相相邻的该减光区域532之间的透光区域531。透光区域531与减光区域532相比光透射率较高。减光区域532与透光区域531相比光透射率较低。透光区域531和减光区域532在沿着有效区域A的给定方向上延伸,并在与给定方向正交的方向上反复交替地排列。给定方向例如是沿着子像素的对角线的方向。给定方向例如可以设为在沿第1方向横切a个子像素期间,沿第2方向横切b个子像素的方向(a、b是互质的正的整数)。此外,给定方向也可以设为第2方向。
视差屏障53规定从排列在有效区域A的子像素射出的图像光的传播方向。由此,从有效区域A的一部分的子像素出射的图像光透射透光区域531,经由反射器3以及光学构件4向利用者的左眼传播。视差屏障53规定从另一部分的子像素出射的图像光的传播方向。由此,从有效区域A的一部分的子像素出射的图像光透射透光区域531,经由反射器3以及光学构件4向利用者的右眼传播。
如图5所示,定义利用者的各眼分别能够视认的有效区域A的作为虚像的第1虚像V1中的区域。之后,将左眼通过向利用者的左眼的位置传播的图像光而可以视认的第1虚像V1内的区域称为左可视区域VaL(第1可视区域)。将右眼通过向利用者的右眼的位置传播的图像光而可以视认的第1虚像V1内的区域称为右可视区域VaR(第2可视区域)。
利用者看上去犹如经由作为视差屏障53的虚像的第2虚像V2而对第1虚像V1进行视认那样地识别图像。
第2通信模块54构成为能够与移动体20的ECU(Engine Control Unit(引擎控制单元)或Electric Control Unit(电控单元))通信。第2通信模块54可以经由CAN(ControllerArea Network,控制器区域网络)(注册商标)、LIN(Local Interconnect Network,本地互联网络)、车载Ethernet(以太网)(注册商标)等车辆内的网络与ECU通信。第2通信模块54可以从ECU接收运动信号。运动信号是指示表示移动体20的运动的参数的信号。运动的参数包括加速度以及角加速度的至少1个。
第2通信模块54构成为能够与摄像装置1的第1通信模块13通信。在基于第2通信模块54的与第1通信模块13的通信中使用的通信方式可以与第1通信模块13中使用的通信方式相同。
控制器55与HUD2的各结构要素连接。控制器55构成为对各结构要素进行控制。由控制器55控制的结构要素包括照射器51、显示面板52以及第2通信模块54。控制器55可以包括1个以上的处理器。处理器可以包括读入特定的程序并执行特定的功能的通用的处理器、以及专用于特定的处理的专用的处理器。专用的处理器可以包括ASIC。处理器可以包括PLD。PLD可以包括FPGA。控制器55可以是1个或多个处理器协作的SoC以及SiP的任一者。
存储器56例如利用RAM(Random Access Memory)以及ROM(Read Only Memory)等任意的存储器件构成。存储器56构成为存储由控制器55处理的各种信息。存储器56例如构成为存储设定时的利用者的眼睛的位置。存储器56构成为对在设定时与利用者的左眼可以视认的虚像子像素对应的有效区域A上的左显示子像素进行存储。存储器56构成为对在设定时与利用者的右眼可以视认的虚像子像素对应的有效区域A上的右显示子像素进行存储。左显示子像素是显示左眼图像的像素。右显示子像素是显示右眼图像的子像素。
在此,对控制器55详细地进行说明。为了使利用者对适当的三维图像进行视认,关于显示面板52的有效区域A的各子像素使右眼图像以及左眼图像的哪一个显示,根据利用者的眼睛的位置而不同。在HUD2的利用开始前的设定模式中,控制器55基于利用者的眼睛的位置来设定由各子像素显示的图像,由此利用者能够在设定时的位置处适当地对三维图像进行视认。
然而,在移动体20的行驶中,根据移动体20的加速度以及角加速度、和加速度以及角加速度的变化,搭乘于移动体20的利用者的眼睛的位置以及姿势会变化。例如,在移动体20在弯曲的道路上行驶的情况下,向利用者施加离心力。在离心力一定的情况下,利用者的姿势不变地保持。离心力的变化越大,则利用者的位置以及姿势越大地变化。在离心力到变为一定的值为止缓慢地变化的情况下,如果利用者的位置的变化较少,离心力接近一定的值且变化变少,则利用者的位置以及姿势的变化收小。在离心力到变为一定的值为止急剧变化的情况下,利用者的位置的变化较大,引起伴随着该变化的摇晃并且利用者的位置以及姿势的变化收小。
因此,控制器55构成为基于运动信号表示的移动体20的运动的参数,使显示面板52显示视差图像显示。例如,控制器55可以使显示面板的一部分的子像素显示左眼图像,并使显示面板的不同的一部分的子像素显示右眼图像。控制器55构成为基于移动体20的加速度或角加速度来判定由各子像素显示的视差图像,以使得使利用者对适当的三维图像进行视认。之后,分别对用于控制器55基于加速度或角加速度来判定使各子像素各子像素显示的视差图像的推定方式以及实测验证方式进行说明。
<<推定方式>>
<设定模式>
(眼睛的位置的判定)
控制器55构成为在进行通常模式下的向显示面板52的图像的显示之前,基于反射器3的位置以及姿势,推定利用者的眼睛的位置。
例如,控制器55构成为通过任意的方法设定反射器3的位置以及姿势,以使得从三维显示装置5射出的图像光到达利用者的眼睛。例如,控制器55控制为在使显示面板52显示任意的测试用图像的状态下,第2通信模块54发送用于驱动反射器3的驱动信号。反射器3构成为接收驱动信号,并基于该驱动信号来变更位置以及姿势。在利用者视认到测试用图像时,将表示第1调整已结束的信息输入到三维显示装置5。控制器55构成为将输入表示第1调整已结束的信息时的反射器3的位置以及姿势判定为在通常模式下设定的反射器3的位置以及姿势。
控制器55构成为基于在通常模式下设定的反射器3的位置以及姿势来推定图像光向反射器3的入射方向,并且使用光学构件4的位置以及姿势来推定利用者的眼睛的位置。控制器55构成为将在设定模式下推定出的利用者的眼睛的位置(设定时的眼睛的位置)存储在存储器56。
(图像的判定)
控制器55构成为为了在未向移动体20施加加速度以及角加速度的状态下使利用者对三维图像进行视认,而判定使各子像素显示的图像。
例如,控制器55使显示面板52显示包括分别用于使左眼以及右眼视认的第1校正用图像以及第2校正用图像的校正用图像。第1校正用图像例如可以是亮度比接近最高亮度的给定值高的白色图像。第2校正用图像例如可以是亮度比接近最低亮度的给定值低的黑色图像。
如果参照图3进行说明,则控制器55构成为在包括(2×n)个(在图3的例子中,n=6)子像素的子像素组Pg中使在沿水平方向连续的n个子像素显示第1校正用图像。控制器55构成为使在沿水平方向连续的剩余n个子像素显示第2校正用图像。控制器55构成为在与视差屏障53的延伸方向对应的方向上使第1校正用图像以及第2校正用图像分别连续地显示。在图3所示的例子中,控制器55构成为使子像素P1至P6显示第1校正用图像,并使子像素P7至P12显示第2校正用图像。
控制器55构成为使在水平方向上各错开1子像素依次显示第1校正用图像以及第2校正用图像。在图3所示的例子中,控制器55构成为使子像素P2至P7显示第1校正用图像,使子像素P8至P12以及P1显示第2校正用图像。控制器55构成为之后使子像素P3至P8显示第1校正用图像,使子像素P9至P12、P1以及P2显示第2校正用图像。像这样,控制器55构成为使12图案的校正用图像依次显示。
控制器55在使多个校正用图像依次显示的期间,在利用者利用左眼仅对第1校正用图像的虚像进行视认,且利用右眼仅对第2校正用图像的虚像进行视认的状态下,将表示第2调整已结束的信息输入到三维显示装置5。控制器55可以将在输入表示第2调整已结束的信息时显示第1校正用图像的子像素判定为左显示子像素,将显示第2校正用图像的子像素判定为右显示子像素。
控制器55构成为如果判定出了左显示子像素以及右显示子像素,则使左显示子像素显示左眼图像,并使右显示子像素显示右眼图像。利用者可以利用左眼对左眼图像的虚像进行视认,并利用右眼对右眼图像的虚像进行视认。左眼图像以及右眼图像是互相具有视差的视差图像,因而利用者对三维图像的虚像进行视认。
<通常模式>
(眼间方向上的眼睛的位置的变化的推定)
根据移动体20的眼间方向的加速度以及加速度的变化(单位时间的变化量以及变化的方向),如图6A所示,搭乘于移动体20的利用者U1的眼睛的位置在眼间方向上变化。控制器55构成为获取第2通信模块54从ECU接收的运动信号表示的眼间方向的加速度。控制器55构成为对眼间方向的加速度的变化进行计算。控制器55构成为基于眼间方向的加速度以及加速度的变化,推定眼间方向上的眼睛的位置的变化(变化量以及变化的方向)。例如,控制器55可以使用表示眼间方向的加速度以及加速度的变化与眼间方向的眼睛的位置的对应的表格,来推定眼间方向的眼睛的位置。控制器55可以使用用于根据眼间方向的加速度以及加速度的变化来计算眼间方向的眼睛的位置的变换式,来推定眼间方向的眼睛的位置。
控制器55构成为基于眼睛的位置的变化,使显示面板52显示视差图像。例如,控制器55构成为基于眼睛的位置的变化、和存储在存储器56的设定时的眼睛的位置以及设定时的左显示子像素以及右显示子像素,判定变化后的左显示子像素以及右显示子像素。例如,控制器55构成为将在变化后与左眼可以视认的虚像子像素VP对应的子像素P判定为左显示子像素。控制器55构成为将在变化后与右眼可以视认的虚像子像素VP对应的子像素P判定为右显示子像素。控制器55构成为使被判定为左显示子像素的子像素显示左眼图像。控制器55构成为使被判定为右显示子像素的子像素显示右眼图像。
在图7所示的例子中,控制器55基于设定时的眼睛的位置(变化前的眼睛的位置),将与左可视区域VaL的虚像子像素VP3至VP8对应的子像素P3至P8判定为左显示子像素,并使左眼图像显示。控制器55将与右可视区域VaR的虚像子像素VP9至VP12、VP1以及VP2对应的子像素P9至P12、P1以及P2判定为右显示子像素,并使右眼图像显示。在变化后,控制器55构成为将与左可视区域VaL’的虚像子像素VP4至VP9对应的子像素P4至P9判定为左显示子像素,并使左眼图像显示。控制器55构成为将与变化后的右可视区域VaR’的虚像子像素VP10至VP12以及VP1至VP3对应的子像素P10至P12以及P1至P3判定为右显示子像素,并使右眼图像显示。
控制器55除眼间方向的加速度以及加速度的变化之外,还可以基于在设定模式下判定出的高度方向的眼睛的位置,推定眼睛的位置的变化量。在处于利用者已就座的状态的情况下,如图6A以及图6B所示,从就座面起的眼睛的位置越高,则利用者的眼睛的位置在眼间方向上变化的量越大。图6A所示的从利用者U1的就座面起的眼睛的位置的高度v
控制器55除眼间方向的加速度以及加速度的变化之外,还可以基于重力方向和高度方向的任一者,推定眼睛的位置的变化量。例如,如图8所示,在移动体20所位于的路面相对于水平面倾斜的情况下,重力方向和高度方向(v轴方向)不一致。重力方向是施加重力G的方向。在该情况下,对利用者的眼间方向加上重力G相对于眼间方向(u轴方向)的分量G
控制器55构成为在重力的眼间方向的分量的朝向与基于眼间方向的加速度以及加速度的变化的力的朝向相同的情况下,相比于重力方向和高度方向一致的情况,使显示左眼图像以及左右眼图像的位置较大地变化。控制器55构成为在重力的眼间方向的分量的朝向与基于眼间方向的加速度以及角加速度的变化的力的朝向相反的情况下,相比于重力方向和高度方向一致的情况,使显示左眼图像以及右眼图像的位置较小地变化。
(前后方向上的眼睛的位置的变化的推定)
根据移动体20的前后方向的加速度以及加速度的变化,如图9A所示,搭乘于移动体20的利用者U1的眼睛的位置可以在前后方向上变化。控制器55构成为基于前后方向上的眼睛的位置的变化,判定由各子像素显示的图像。
例如,控制器55构成为获取第2通信模块54从ECU接收到的运动信号表示的前后方向的加速度。控制器55构成为对前后方向的加速度的变化进行计算。控制器55构成为基于前后方向的加速度以及加速度的变化,推定眼睛的位置从设定时的眼睛的位置起前后方向的眼睛的位置的变化ΔVd。例如,控制器55可以使用表示前后方向的加速度以及加速度的变化与前后方向的眼睛的位置的对应的表格,来推定前后方向的眼睛的位置。控制器55可以使用用于计算前后方向的加速度以及加速度的变化或前后方向的眼睛的位置的变换式,来推定前后方向的眼睛的位置。
如图10所示,眼睛的位置在前方向上变化时的变化ΔVd越长,则作为左可视区域VaL’且作为右可视区域VaR’的区域变得越宽。如果将左眼图像显示在与该区域所包括的虚像子像素VP对应的子像素P,则利用者的右眼对左眼图像的虚像进行视认。如果将右眼图像显示在该区域所包括的虚像子像素VP对应的子像素P,则利用者的左眼对右眼图像的虚像进行视认。因此,串扰发生,利用者不能适当地对三维图像进行视认。
为了使这样的串扰降低,控制器55例如可以将既可以由左眼也可以由右眼视认的虚像子像素VP所对应的子像素P判定为黑色显示子像素,并使黑色图像显示。黑色图像例如是如黑色那样的具有给定亮度的图像。给定亮度能够设为子像素P能够显示的灰度等级中的最低的灰度的亮度或与以此为准的灰度的亮度对应的值。控制器55例如可以将左眼能够视认且右眼不能视认的虚像子像素VP所对应的子像素P判定为左显示子像素,并使左眼图像显示。控制器55例如可以将左眼不能视认且右眼能够视认的虚像子像素VP所对应的子像素P判定为右显示子像素,并使左眼图像显示。由此,利用者的左眼不对右眼图像进行视认,右眼不对左眼图像进行视认,因而可以降低串扰的发生。
在图10所示的例子中,控制器55基于设定时(变化前)的眼睛的位置,使左眼可以视认的虚像子像素VP3至VP8所对应的子像素P3至P8显示左眼图像。控制器55使右眼可以视认的虚像子像素VP9至VP12、VP1以及VP2所对应的子像素P9至P12、P1以及P2显示右眼图像。如果眼睛的位置变化,则左眼可以视认的虚像子像素VP变为虚像子像素VP4至VP9。此时,右眼可以视认的虚像子像素VP变为虚像子像素VP8至VP12、VP1以及VP2。虚像子像素VP8以及VP9成为左眼、右眼均可以视认的子像素。控制器55可以将虚像子像素VP8以及VP9所对应的子像素P8以及P9设为黑色显示子像素,并使黑色图像显示。控制器55可以将虚像子像素VP4至VP7所对应的子像素P4至P7判定为左显示子像素,并使左眼图像显示。控制器55可以将虚像子像素VP10至VP12、VP1以及VP2所对应的子像素P10至P12、P1以及P2判定为右显示子像素,并使右眼图像显示。
除加速度之外,控制器55还可以基于在设定模式下判定出的高度方向的眼睛的位置来推定眼睛的位置的变化量。在利用者处于就座的状态的情况下,如图9A以及图9B所示,从就座面起的眼睛的位置越高,则利用者的眼睛的位置在前后方向上变化的量越大。图9A所示的从利用者U1的就座面起的眼睛的位置的高度v
控制器55可以除加速度之外或者取代加速度,还基于角加速度来推定眼睛的位置的变化量。
(图像的显示)
控制器55构成为基于眼间方向以及前后方向上的眼睛的位置的变化,使用设定时的眼睛的位置、设定时的左显示子像素以及右显示子像素以及三维显示装置5的特性,判定使各子像素显示的图像。控制器55构成为基于判定,使显示面板52显示图像。
<<实测验证方式>>
<设定模式>
控制器55构成为与推定方式相同地判定设定时的左眼以及右眼的位置、和左显示子像素以及右显示子像素。
<通常模式>
(眼间方向上的眼睛的位置的变化的推定)
控制器55构成为使摄像装置1生成摄像图像。例如,控制器55构成为生成摄像控制信号,进行控制以使得第2通信模块54将摄像控制信号发送到摄像装置1。控制器55构成为获取由接收到摄像控制信号的摄像装置1生成的摄像图像。控制器55可以将使摄像装置1生成摄像图像的定时设为任意的。例如,控制器55可以以给定时间间隔使摄像装置1生成摄像图像。例如,控制器55可以在判定加速度为阈值以上的情况下,使摄像装置1生成摄像图像。阈值是加速度为该阈值以上的情况下的利用者的眼睛的变化与通过上述的表格或变换式推定的眼睛的变化不一致的可能性被预测为较高的值的最低值。阈值可以通过预先的实验等来决定。
控制器55构成为基于摄像图像来推定利用者的眼睛的位置。例如,控制器55可以基于由摄像元件12生成的单一的摄像图像所包括的给定物体的像与眼睛的像的位置关系,来推定真实空间中的眼睛的位置。给定物体是相对于移动体20固定地安装的物体,例如是驾驶座的靠背、侧窗的框架等。
控制器55可以基于由摄像元件12生成的单一的摄像图像中的利用者的身体的至少一部分的像以及给定物体的像的位置、和真实空间中的给定物体的位置,推定真实空间中的眼睛的位置。身体的一部分例如可以是头的顶部、肩、耳朵等。
控制器55构成为与推定方式相同地基于眼间方向的加速度以及加速度的变化,来推定利用者的眼睛的位置的变化。
控制器55构成为计算基于摄像图像而推定出的眼睛的位置从设定时的眼睛的位置起的变化与基于眼间方向的加速度以及加速度的变化而推定出的眼睛的位置的变化的差值。控制器55构成为使用差值来对眼间方向的加速度以及加速度的变化与眼睛的位置的变化的对应关系进行校正。例如,控制器55可以基于差值,对表示眼间方向的加速度以及加速度的变化与眼睛的位置的变化的对应的表格进行校正。控制器55可以基于差值,对用于根据眼间方向的加速度以及加速度的变化来计算眼睛的位置的变化的变换式进行校正。
之后,控制器55构成为到下一次校正对应关系为止,使用校正了的对应关系与推定方式相同地,基于眼间方向的加速度来判定前后方向的眼睛的位置。
(前后方向上的眼睛的位置的变化的推定)
控制器55构成为获取第2通信模块54从ECU接收到的运动信号表示的前后方向的加速度。控制器55构成为基于前后方向的加速度来计算前后方向的加速度的变化。控制器55构成为基于前后方向的加速度以及加速度的变化,提取前后方向上的眼睛的位置的变化。
控制器55构成为获取由摄像装置1生成的摄像图像,并基于摄像图像来推定利用者的眼睛的位置。
控制器55构成为计算基于摄像图像而推定出的眼睛的位置从设定时起的变化与基于前后方向的加速度以及加速度的变化而推定出的眼睛的位置的变化的差值。控制器55构成为使用差值,对前后方向的加速度以及加速度的变化与眼睛的位置的变化的对应关系进行校正。例如,控制器55可以基于差值,对表示前后方向的加速度以及加速度的变化与眼睛的位置的变化的对应的表格进行校正。控制器55可以基于差值,对用于根据前后方向的加速度以及加速度的变化来计算眼睛的位置的变化的变换式进行校正。之后,控制器55到下一次校正对应关系进行为止,使用校正了的对应关系与推定方式相同地,基于前后方向的加速度来判定前后方向的眼睛的位置。
(图像的显示)
控制器55构成为与推定方式相同地,基于眼间方向以及前后方向上的眼睛的位置的变化,使显示面板52显示图像。
<<使用推定方式的处理流程>>
接下来,参照图11来对控制器55使用推定方式而执行的通常模式下的处理详细地进行说明。控制器55在开始通常模式下的处理之前对真实空间中的利用者的眼睛的位置(设定时的眼睛的位置)和左显示子像素以及右显示子像素进行判定。控制器55使存储器56存储利用者的眼睛的位置和左显示子像素以及右显示子像素。如果用于开始通常模式下的处理的开始指示被输入到HUD2,则控制器55开始处理。
首先,控制器55获取第2通信模块54从ECU接收到的运动信号表示的眼间方向的加速度(步骤S11)。
如果在步骤S11中获取到眼间方向的加速度,则控制器55计算眼间方向的加速度的变化(步骤S12)。
如果在步骤S12计算出加速度的变化,则控制器55基于眼间方向的加速度以及加速度的变化,推定眼间方向上的眼睛的位置的变化(步骤S13)。
接下来,控制器55获取第2通信模块54从ECU接收到的运动信号表示的前后方向的加速度(步骤S14)。
如果在步骤S14中获取到前后方向的加速度,则控制器55计算前后方向的加速度的变化(步骤S15)。
如果在步骤S15中计算出前后方向的加速度的变化,则控制器55基于前后方向的加速度以及加速度的变化,来推定前后方向上的眼睛的位置的变化(步骤S16)。
控制器55基于眼间方向以及前后方向的眼睛的位置的变化,并使用存储在存储器56的设定时的眼睛的位置、和设定时的左显示子像素以及右显示子像素,使显示面板52显示图像(步骤S17)。
<<使用实测验证方式的处理流程>>
参照图12对控制器55使用实测验证方式而执行的通常模式下的处理详细地进行说明。控制器55在开始通常模式下的处理之前,推定了真实空间中的利用者的眼睛的位置(设定时的眼睛的位置),并且对左显示子像素以及右显示子像素进行判定。控制器55使存储器56存储利用者的眼睛的位置、和左显示子像素以及右显示子像素。如果用于开始通常模式下的处理的开始指示被输入到HUD2,则控制器55开始处理。
首先,控制器55获取第2通信模块54从ECU接收到的运动信号表示的眼间方向的加速度(步骤S21)。
如果在步骤S21中获取到眼间方向的加速度,则控制器55计算眼间方向的加速度的变化(步骤S22)。
如果在步骤S22中计算出眼间方向的加速度的变化,则控制器55基于眼间方向的加速度以及加速度的变化,来推定眼间方向上的眼睛的位置的变化(步骤S23)。
控制器55获取第1通信模块54从ECU接收到的运动信号表示的前后方向的加速度(步骤S24)。
如果在步骤S24中获取到前后方向的加速度,则控制器55计算前后方向的加速度的变化(步骤S25)。
如果在步骤S25中计算出前后方向的加速度的变化,则控制器55基于前后方向的加速度以及速度的变化,来推定前后方向上的眼睛的位置的变化(步骤S26)。
控制器55判定是否是使摄像装置1生成摄像图像的定时(步骤S27)。
如果控制器55在步骤S27中判定是使摄像装置1生成摄像图像的定时,则使摄像装置1生成摄像图像,并获取该摄像图像(步骤S28)。
控制器55基于摄像图像,来推定眼间方向以及前后方向上的眼睛的位置的变化(步骤S29)。
控制器55使用在步骤S23中推定出的眼间方向的眼睛的位置的变化与在步骤S29中推定出的眼间方向的眼睛的位置的变化的差值,对眼间方向的加速度以及加速度的变化与眼睛的位置的变化的对应关系进行校正。控制器55使用在步骤S26中推定出的前后方向的眼睛的位置的变化与在步骤S29中推定出的前后方向的眼睛的位置的变化的差值,对前后方向的加速度以及加速度的变化与眼睛的位置的变化的对应关系进行校正(步骤S30)。
如果在步骤S30中对应关系得以校正,则控制器55基于加速度以及加速度的变化,使用校正了的对应关系来判定利用者的眼睛的位置。控制器55基于利用者的眼睛的位置,使显示面板52显示图像。在步骤S27中判定不是生成摄像图像的定时的情况下,控制器55基于加速度以及加速度的变化,并基于已经设定或校正了的对应关系来判定利用者的眼睛的位置。控制器55基于利用者的眼睛的位置,使显示面板52显示图像(步骤S31)。
作为本实施方式涉及的三维显示装置5,能够采用计算机等信息处理装置。这样的信息处理装置能够通过将描述实现实施方式涉及的三维显示装置5的各功能的处理内容的程序保存在信息处理装置的存储器,并由信息处理装置的控制器读取该程序并执行来实现。信息处理装置可以构成为从非暂时性的计算机可读介质读取该程序,从而进行安装。非暂时性计算机可读介质包括磁存储介质、光学存储介质、光磁存储介质、半导体存储介质,但不限于此。磁存储介质包括磁盘、硬盘、磁带。光学存储介质包括CD(Compact Disc,光盘)、DVD、蓝光光盘(Blu-ray(注册商标)Disc)等光盘。半导体存储介质包括ROM(Read OnlyMemory,只读存储器)、EEPROM(Electrically Erasable Programmable Read-OnlyMemory,电可擦除只读存储器)、闪速存储器。
如以上说明的那样,在本实施方式中,三维显示装置5构成为接收表示移动体20的运动的参数的运动信号,并基于运动信号表示的参数,使显示面板52显示视差图像。因此,三维显示装置5能够推定利用者的眼睛的位置随着移动体20的动作的变化,并基于该变化显示视差图像,以使得利用者适当地对三维图像进行视认。三维显示装置5不基于摄像图像而基于运动的参数来显示视差图像,因而可以降低针对摄像图像的处理负荷。
在本实施方式中,三维显示装置5构成为基于高度方向上的利用者的眼睛的位置来显示视差图像。例如,构成为在利用者处于就座的状态的情况下,即使运动的参数的变化相同,也是高度方向越高则眼睛的位置相对于眼间方向越大地变化。构成为眼间方向的眼睛的位置不仅根据运动的参数还根据高度方向上的眼睛的位置而变化。三维显示装置5通过根据高度方向上的眼睛的位置来显示视差图像,从而能够使利用者更适当地对三维图像进行视认。
控制器55构成为基于使图像光反射的反射器3的位置以及姿势,推定高度方向上的利用者的眼睛的位置。通信HUD系统100例如不需要为了推定眼睛的位置而设置拍摄利用者的眼睛的摄像装置。三维显示装置5能够利用简易的结构使利用者适当地对三维图像进行视认。
在本实施方式中,三维显示装置5构成为基于利用者的高度方向与重力方向的偏离使显示面板52显示视差图像。在重力方向和高度方向偏离的情况下,产生重力G的眼间方向的分量G
上述的实施方式作为代表性的例进行了说明,能够在本发明的主旨以及范围内进行许多变更以及置换,这对本领域技术人员来说是显然的。因此,本发明不应解释为由上述的实施方式限制,能够不脱离专利权利要求书而进行各种变形以及变更。例如,能够将实施方式以及实施例所述的多个结构块组合为1个、或者对1个结构块进行分割。
例如,在上述的实施方式中,控制器55在进行步骤S11至步骤S13之后,进行步骤S14至步骤S16,但不限于此。例如,控制器55也可以在进行步骤S14至步骤S16之后,进行步骤S11至步骤S13。控制器55也可以并行地进行步骤S11至步骤S13、和步骤S14至步骤S16。
例如,在上述的实施方式中,控制器55在进行步骤S21至步骤S23之后,进行步骤S24至步骤S26,但不限于此。例如,控制器55也可以在进行步骤S24至步骤S26之后,进行步骤S21至步骤S23。控制器55也可以并行地进行步骤S21至步骤S23、和步骤S24至步骤S26。
例如,在上述的实施方式中,如图13所示,三维显示装置5也可以配置为从显示面板52射出的图像光透射视差屏障53的透光区域531,并且不经由反射器3以及光学构件4而直接到达利用者的眼睛。在这样的结构中,控制器55将利用者的左眼直接视认的有效区域A上的子像素设为左显示子像素。控制器55将利用者的右眼直接视认的右可视区域52aR所包括的子像素设为右显示子像素。
例如,在上述的实施方式中,设为光学元件是视差屏障53,但不限于此。例如,如图14所示,光学元件也可以是凸透镜57。在该情况下,凸透镜57将在垂直方向上延伸的柱面透镜571在平面上沿水平方向排列而被构成。凸透镜57与视差屏障53同样地,使经过一部分的子像素出射的图像光传播到利用者的左眼的位置,并使经过另一部分的子像素出射的图像光传播到利用者的右眼的位置。
符号说明
1:摄像装置;
2:平视显示器;
3:反射器;
4:光学构件;
5:三维显示装置;
11:摄像光学系统;
12:摄像元件;
13:第1通信模块;
20:移动体;
51:照射器;
52:显示面板;
53:视差屏障;
54:第2通信模块;
55:控制器;
531:透光区域;
532:减光区域;
A:有效区域;
V1:第1虚像;
V2:第2虚像;
VaL:左可视区域;
VaR:右可视区域;
VbL:左减光区域;
VbR:右减光区域;
53aL:左可视区域;
53aR:右可视区域;
100:通信平视显示器系统。
- 三维显示装置、平视显示器、移动体以及程序
- 三维显示装置、三维显示系统、平视显示器以及移动体