手术器械精度验证方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉医疗器械技术领域,特别是涉及一种手术器械精度验证方法。
背景技术
近年来,随着神经影像学、显示技术、计算机等科学的迅速发展,牙科种植技术已经日渐成熟,牙科种植过程中的手术器械作为牙科医生用来实施口腔种植手术的直接工具,其准确度、实时跟踪定位的精确性,是实现手术导航成功的关键。而手术过程中为了达到准确跟踪手术器械的目的,需要术前对手术器械进行精度验证,并在此基础上作进一步矫正和提升。
目前,在牙科种植过程中并没有专门用于对手术器械进行精度验证的方法,并不能够准确地确定手术器械存在的精度误差,只是凭借牙科医生的经验进行判断,使得牙科种植的效果过度依赖于牙科医生,限制了牙科种植技术的进一步普及。为了解决这一问题,市面上出现了一些专业软件进行手术器械的精度验证,但是这些专业软件或是需要对牙科医生进行一段时间的专业培训或是需要配备专业人员专门负责进行操作,导致人力成本较高,使用较为麻烦,不利于一些财力和人力不足的小型诊所配备。
发明内容
基于此,有必要针对上述手术器械的精度验证较为麻烦且不易操作的问题,提供一种手术器械精度验证方法。
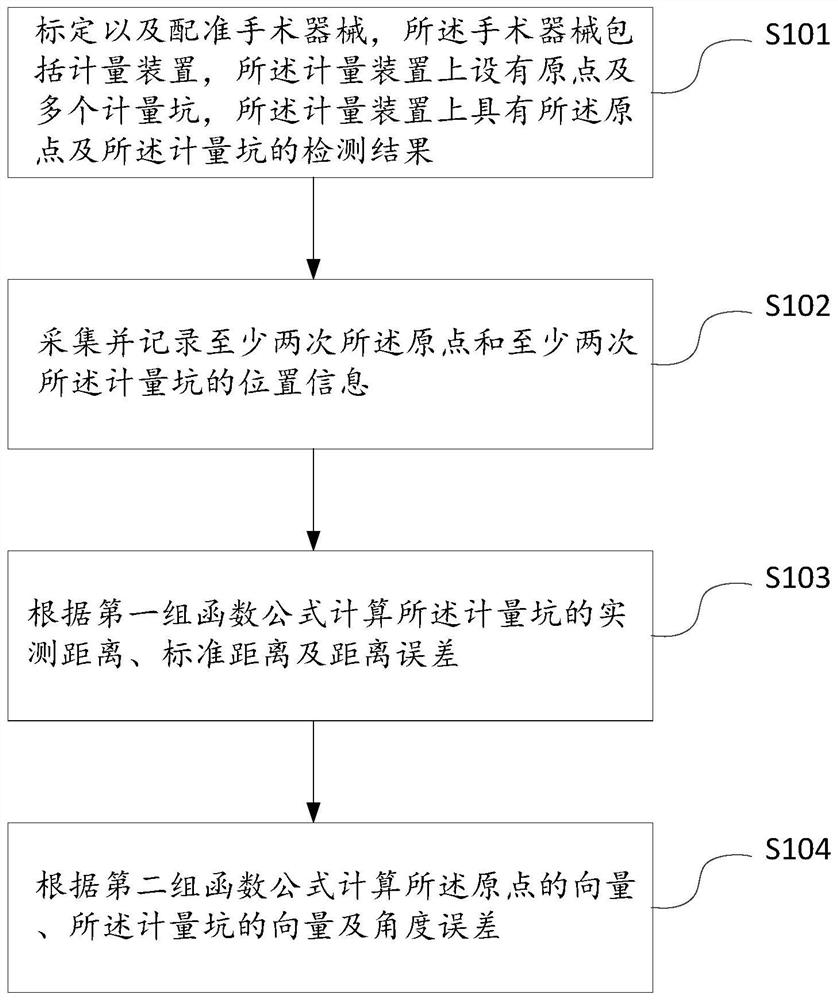
一种手术器械精度验证方法,依次包括以下步骤:
步骤S101,标定以及配准手术器械,所述手术器械包括计量装置,所述计量装置上设有原点及多个计量坑,所述计量装置上具有所述原点及所述计量坑的检测结果;
步骤S102,采集并记录至少两次所述原点和至少两次所述计量坑的位置信息;
步骤S103,根据第一组函数公式计算所述计量坑的实测距离、标准距离及距离误差;
步骤S104,根据第二组函数公式计算所述原点的向量、所述计量坑的向量及角度误差。
在其中一个实施例中,所述根据第一组函数公式计算所述计量坑的实测距离、标准距离及距离误差,具体包括:
根据一次所述计量坑的位置信息以及第一平方差公式计算所述计量坑到所述原点的实测距离;
根据所述计量装置检测结果以及第二平方差公式计算所述计量坑到所述原点的标准距离;
根据所述实测距离、所述标准距离以及减法公式计算距离误差。
在其中一个实施例中,所述标准距离根据所述第二平方差公式
在其中一个实施例中,所述计量坑到所述原点的实测距离根据所述第一平方差公式
在其中一个实施例中,所述距离误差根据减法公式ΔL=L
在其中一个实施例中,所述根据第二组函数公式计算所述原点的向量、所述计量坑的向量及角度误差,具体包括:
根据两次所述计量坑的位置信息以及第一坐标差值公式计算所述计量坑的向量;
根据两次所述原点的位置信息以及第二坐标差值公式计算所述原点的向量;
根据所述计量坑的向量、所述原点的向量以及反三角函数公式计算角度误差。
在其中一个实施例中,所述计量坑的向量根据所述第一坐标差值公式
在其中一个实施例中,所述原点的向量根据所述第二坐标差值公式
在其中一个实施例中,所述计量坑的角度误差根据所述反三角函数公式
公式
公式
公式
在其中一个实施例中,所述标定以及配准手术器械,具体包括:
连接参考板、计量装置以及配准装置,且所述参考板、计量装置以及配准装置之间相对固定;
采集及记录所述原点及所述计量坑的检测结果。
在上述手术器械精度验证方法中,首先通过步骤S101,对手术器械进行标定以及配准,手术器械中的计量装置上具有用于表征原点及计量坑的标准位置信息的检测结果;接着通过步骤S102采集并记录至少两次原点和至少两次计量坑的位置信息,采集的这些位置信息用于表征原点及计量坑的实际位置信息;然后通过步骤S103,根据第一组函数公式分别计算计量坑的实测距离、标准距离以及距离误差,该距离误差用于表征手术器械距离验证的误差;最后通过步骤S104,根据第二组函数公式计算原点的向量、计量坑的向量及角度误差,该角度误差用于表征手术器械角度验证的误差。通过采集的原点及计量坑的位置信息以及第一组函数公式、第二组函数公式能够较为方便快捷地计算出手术器械的距离验证误差和角度验证误差,并且该计算过程简单透明,具有较高的认可性,并不需要专业人员操作,普通技术人员均可操作,并且可以重复计算过程,以使得手术器械精度验证方法的可重复性和可操作性较好。
附图说明
图1为根据本发明提供的一种手术器械精度验证方法的流程图;
图2为根据本发明提供的一种手术器械与牙颌所组成的模块的结构示意图。
附图标记:
100、计量装置;110、原点;120、计量坑;200、手机;300、手机定位器;400、参考板;500、配准装置;600、牙颌;700、固定件。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
如图1所示,本发明提供了一种手术器械精度验证方法,依次包括以下步骤:
步骤S101,标定以及配准手术器械,如图2所示,手术器械包括计量装置100,计量装置100上设有原点110及多个计量坑120,计量装置100上具有原点110及计量坑120的检测结果。在具体设置时,手术器械专指在临床手术中所使用的医疗器械,该手术器械包括手机200、手机定位器300、参考板400、计量装置100以及配准装置500。其中,手机200用于进行手术操作;手机定位器300安装在手机200上,能够被其他设备例如导航仪等识别到;配准装置500通过固定件700例如螺钉等安装在牙颌600上,用于确定牙颌600上待操作部位的位置;计量装置100与配准装置500信号相连,计量装置100上设有原点110及多个计量坑120,这些原点110及多个计量坑120用于进行精度验证,并且该计量装置100上具有原点110及计量坑120的检测结果,这些检测结果用于表征原点110及计量坑120的标准位置信息;参考板400固定在计量装置100上,用于辅助手机定位器300被识别出来。
在步骤S101中,参考板400、计量装置100以及配准装置500连接在一起,然后进行手术器械的标定以及配准,以预备进行后续手机200采集信息。而为了便于进行手术器械的标定以及配准,一种优选实施方式,标定以及配准手术器械,具体包括:首先连接参考板400、计量装置100以及配准装置500,并且在连接后需要保证参考板400、计量装置100以及配准装置500之间相对固定,以便于保证后续采集过程的精准性;然后采集及记录原点110及计量坑120的检测结果,以实现手术器械的标定以及配准,使得计量装置100能够带有原点110及计量坑120的标准位置信息,便于进行后续的对比。
步骤S102,采集并记录至少两次原点110和至少两次计量坑120的位置信息。在具体设置时,通过手机200对计量装置100上的原点110及计量坑120进行操作,手机200采集原点110及多个计量坑120的位置信息,并且手机200采集和记录的次数至少为两次,例如两次、三次、四次或是四次以上,以便于一次标定以及配准手术器械进行多次采集,从而能够进行多次验证,简化操作过程,而采集的这些位置信息用于用于表征原点110及计量坑120的实际位置信息,以预备进行后续误差计算操作,手机200采集这些位置信息后记录在其内部的控制模块内,该控制模块可以为EXCEL软件,当然并不局限于此,该控制模块还可以为其他能够存储及计算的程序内,由于不同的控制模块仅限于计算逻辑不同,并不影响手术器械精度验证方法的操作,为了便于说明手机200内的控制模块设定为EXCEL软件,该EXCEL软件计算并显示信息。
步骤S103,根据第一组函数公式计算计量坑120的实测距离、标准距离及距离误差。在具体设置时,手机200内的EXCEL软件根据第一组函数公式分别计算计量坑120的实测距离、标准距离以及距离误差,其中,实测距离是计量坑120相对原点110的实际距离,标准距离是计量装置100的检测结果所对应的计量坑120相对原点110的标准距离,距离误差是实测距离相对标准距离的误差值,该距离误差用于表征手术器械距离验证的误差,多次采集的原点110和多个计量坑120的位置信息、实测距离、标准距离以及距离误差可以在手机200的操作界面上显示。
步骤S104,根据第二组函数公式计算原点110的向量、计量坑120的向量及角度误差。在具体设置时,手机200内的EXCEL软件根据第二组函数公式计算原点110的向量、计量坑120的向量及角度误差,其中,原点110的向量用于表征两次采集的原点110的位置变化方向,计量坑120的向量用于表征两次采集的计量坑120的位置变化方向,角度误差是计量坑120的向量相对原点110的向量的偏转角度,该角度误差用于表征手术器械角度验证的误差,多次采集的原点110和多个计量坑120的位置信息、原点110的向量、计量坑120的向量及角度误差可以在手机200的操作界面上显示。
在上述手术器械精度验证方法中,首先通过步骤S101,对手术器械进行标定以及配准,手术器械中的计量装置100上具有用于表征原点110及计量坑120的标准位置信息的检测结果;接着通过步骤S102采集并记录至少两次原点110和至少两次计量坑120的位置信息,采集的这些位置信息用于表征原点110及计量坑120的实际位置信息;然后通过步骤S103,根据第一组函数公式分别计算计量坑120的实测距离、标准距离以及距离误差,该距离误差用于表征手术器械距离验证的误差;最后通过步骤S104,根据第二组函数公式计算原点110的向量、计量坑120的向量及角度误差,该角度误差用于表征手术器械角度验证的误差。通过采集的原点110及计量坑120的位置信息以及第一组函数公式、第二组函数公式能够较为方便快捷地计算出手术器械的距离验证误差和角度验证误差,并且该计算过程简单透明,具有较高的认可性,并不需要专业人员操作,普通技术人员均可操作,并且可以重复计算过程,以使得手术器械精度验证方法的可重复性和可操作性较好。
为了便于距离误差的计算,一种优选实施方式,根据第一组函数公式计算计量坑120的实测距离、标准距离及距离误差,具体包括:
根据一次计量坑120的位置信息以及第一平方差公式计算计量坑120到原点110的实测距离。在具体设置时,将一次计量坑120的位置信息输入至EXCEL软件内,并通过第一平方差公式进行运算,以获得计量坑120到原点110的实测距离。
根据计量装置100检测结果以及第二平方差公式计算计量坑120到原点110的标准距离。在具体设置时,将计量装置100的检测结果输入至EXCEL软件内,并通过第二平方差公式进行运算,以获得计量坑120到原点110的标准距离。
根据实测距离、标准距离以及减法公式计算距离误差。在具体设置时,在运算出计量坑120到原点110的实测距离、计量坑120到原点110的标准距离,将原点110的实测距离、计量坑120到原点110的标准距离输入至减法公式内进行运算,以获得计量坑120到原点110的实测距离与计量坑120到原点110的标准距离之间的距离误差。
在上述手术器械精度验证方法中,手机200内的EXCEL软件中预存有第一组函数公式,该第一组函数公式包括第一平方差公式、第二平方差公式以及减法公式,在采集到一次计量坑120的位置信息后并结合计量装置100的检测结果,通过第一平方差公式、第二平方差公式能够较为方便快捷地获得计量坑120到原点110的实测距离以及计量坑120到原点110的标准距离,并继续通过减法公式同样能够较为方便快捷地获得计量坑120到原点110的实测距离与计量坑120到原点110的标准距离之间的距离误差,进而获得手术器械距离验证的误差,该计算过程简单透明,手术器械的距离精度验证较为简单且易操作。
为了便于计算计量坑120到原点110的标准距离,具体地,标准距离根据第二平方差公式
在上述手术器械精度验证方法中,计量装置100的检测结果输入至手机200内,并导入到手机200内的EXCEL软件中,EXCEL软件可以在计量装置100的检测结果导入时就计算出每一计量坑120到原点110的标准距离,EXCEL软件还可以在手机200采集完成后同时计算计量坑120到原点110的标准距离以及计量坑120到原点110的实测距离,而无论是上哪种计算方式,均能够通过第二平方差公式
为了便于计算计量坑120到原点110的实测距离,具体地,计量坑120到原点110的实测距离根据第一平方差公式
在上述手术器械精度验证方法中,手机200采集计量坑120的位置信息,并将该位置信息输入到EXCEL软件中,EXCEL软件可以在每一个计量坑120的位置信息输入后计算出该计量坑120到原点110的实测距离,EXCEL软件还可以在多个计量坑120的位置信息均采集完成后统一计算多个计量坑120的到原点110的实测距离,而无论是上哪种计算方式,均能够通过第一平方差公式
为了便于计算计量坑120到原点110的实测距离与计量坑120到原点110的标准距离之间的距离误差,具体地,距离误差根据减法公式ΔL=L
在上述手术器械精度验证方法中,手机200采集计量坑120的位置信息,并将该位置信息输入到EXCEL软件中,EXCEL软件可以在每一个计量坑120的位置信息输入后计算出该计量坑120到原点110的实测距离,同时计算出计量坑120到原点110的实测距离与计量坑120到原点110的标准距离之间的距离误差,EXCEL软件还可以在多个计量坑120的位置信息均采集完成后统一计算多个计量坑120的到原点110的实测距离以及计量坑120到原点110的实测距离与计量坑120到原点110的标准距离之间的距离误差,而无论是上哪种计算方式,均能够通过减法公式ΔL=L
为了便于角度误差的计算,一种优选实施方式,根据第二组函数公式计算原点110的向量、计量坑120的向量及角度误差,具体包括:
根据两次计量坑120的位置信息以及第一坐标差值公式计算计量坑120的向量。在具体设置时,将两次计量坑120的位置信息输入至EXCEL软件内,并通过第一坐标差值公式进行运算,以获得计量坑120的向量。
根据两次原点110的位置信息以及第二坐标差值公式计算原点110的向量。在具体设置时,将两次原点110的位置信息输入至EXCEL软件内,并通过第二坐标差值公式进行运算,以获得原点110的向量。
根据计量坑120的向量、原点110的向量以及反三角函数公式计算角度误差。在具体设置时,在运算出计量坑120的向量、原点110的向量后,将计量坑120的向量、原点110的向量输入到反三角函数公式内进行运算,以获得计量坑120的向量相对原点110的向量的角度误差。
在上述手术器械精度验证方法中,手机200内的EXCEL软件中预存有第二组函数公式,该第二组函数公式包括第一坐标差值公式、第二坐标差值公式以及反三角函数公式,在采集到两次计量坑120的位置信息,通过第一坐标差值公式能够较为方便快捷地获得计量坑120的向量,在采集到两次原点110的位置信息,通过第二坐标差值公式能够较为方便快捷地获得原点110的向量,并继续通过反三角函数公式同样能够较为方便快捷地获得计量坑120的向量相对原点110的向量的角度误差,进而获得手术器械角度验证的误差,该计算过程简单透明,手术器械的角度精度验证较为简单且易操作。
为了便于计算计量坑120的向量,具体地,计量坑120的向量根据第一坐标差值公式
在上述手术器械精度验证方法中,手机200两次采集计量坑120的位置信息,并将该位置信息输入到EXCEL软件中,EXCEL软件可以在每一个计量坑120的位置信息输入后计算出计量坑120的向量,EXCEL软件还可以在多个计量坑120的位置信息均采集完成后统一计算多个计量坑120的向量,而无论是上哪种计算方式,均能够通过第一坐标差值公式
为了便于计算原点110的向量,具体地,原点110的向量根据第二坐标差值公式
在上述手术器械精度验证方法中,手机200两次采集原点110的位置信息,并将该位置信息输入到EXCEL软件中,EXCEL软件可以在原点110的位置信息输入后计算出原点110的向量,EXCEL软件还可以在原点110以及多个计量坑120的位置信息均采集完成后统一计算原点110的向量以及多个计量坑120的向量,而无论是上哪种计算方式,均能够通过第二坐标差值公式
为了便于计算计量坑120的向量相对原点110的向量的角度误差,具体地,计量坑120的角度误差根据反三角函数公式
公式
公式
公式
在上述手术器械精度验证方法中,由于EXCEL中角度的计算是采用弧度制,反三角函数公式
表1示出了一个具体实施例中EXCEL显示界面,相对应的计量装置100上具有原点110和31个计量坑120,其中,原点110对应表1中的点位1,31个计量坑120对应表1中的点位2-32。
表1
由表1可知,在本实施例中,通过采集的原点110及计量坑120的位置信息以及第一组函数公式、第二组函数公式能够较为方便快捷地计算出手术器械的距离验证误差和角度验证误差,并且该计算过程简单透明,具有较高的认可性,并不需要专业人员操作,普通技术人员均可操作,并且可以重复计算过程,以使得手术器械精度验证方法的可重复性和可操作性较好。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 手术器械精度验证方法
- 一种轮胎高速均匀性设备用高精度轮辋的精度验证方法