分娩磁性跟踪系统
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及分娩装置,尤其涉及一种用于跟踪分娩进展的磁性跟踪系统。
背景技术
分娩期间母亲和婴儿的许多其它生理状况可以被监测,以确定分娩的进展。这些状况包含:(1)颈管消失(effacement)(在分娩的第一阶段之前和期间,宫颈变薄);(2)宫颈扩张(宫颈开口大小的增加);(3)宫颈的位置(宫颈与阴道轴,通常是胎儿头部的关系);(4)高度(station)(胎儿先露部的预定点相对于母亲骨盆的高度);(5)描述头部与骨盆关系的头部位置,以及(6)以及描述宫颈开口处的胎儿部分(如眉毛、脸部或臀部)的先露(presentation)。
存在用于监测分娩进展的系统。例如,授予Paltieli的美国专利6200279和6669653描述了用于监测分娩进展的方法和设备,所述专利以全文引用的方式并入本文中。基于这些专利和其它专利,Trig Medical Ltd.开发了LABORPRO(LP)跟踪器。
LP跟踪器包含主电子模块、磁场发射器和Ascension Technologies(ATC)的位置传感器。
磁场发射器包含两种类型的发射器:位于患者床垫下方的平面发射器和安装在机械臂上的立体发射器。
位置传感器包含无源线圈,所述线圈感应由磁场发射器产生的磁场。3个自由度(DOF)一次性传感器有一个线圈,而6个DOF传感器有3个线圈。这些线圈包含在无源传感器头中。感测到的信号由电子前置放大器放大,并连接到主电子模块。基于这些信号,主电子模块可以识别每个传感器的空间位置和取向。
有三个位置传感器:
一次性背部传感器(“背部传感器”):这个传感器(直径1.8mm)通过覆盖L5棘突的标贴附着在患者的背部,并在整个监测期间一直保持在原位。这个传感器在分娩期间用作位置参考传感器。这个传感器提供3个DOF位置数据。
超声传感器:这个传感器(直径8mm)附接到现成超声系统的腹部探头上。这个探头经过预先校准,可以将超声探头创建的图像中的每个像素精确映射到发射器的3D操作空间(operating volume)。附接的位置传感器提供的数据提供了探头的空间位置和取向(6个DOF),从而促进了超声图像中所有像素的相对3D定位。
手指传感器:这个传感器(直径1.3mm)用于标尺状测量不同的关注点之间的距离。这个传感器提供3个DOF位置数据。
发明内容
本发明试图提供一种新颖的磁性跟踪系统,用于跟踪(监测)分娩(labor/birthdelivery)的进展,如在下文中更详细地描述。另外,磁性跟踪系统可以用于在外科手术过程中引导针。
根据本发明的一个实施例,提供了一种跟踪分娩进展的方法,所述方法包含将磁场传感器阵列放置在怀有胎儿的妇女附近,所述磁场传感器阵列包含磁性传感器的阵列;将跟踪装置放置在相对于所述胎儿的位置处;从每个所述跟踪装置产生磁场,每个所述磁场对于所述跟踪装置中的特定一个是唯一的;用所述磁场传感器阵列感测所述跟踪装置的所述磁场;分析感测到的所述跟踪装置的磁场,以识别所述跟踪装置相对于所述胎儿的位置和取向;以及使用所述跟踪装置相对于所述胎儿的所述位置和取向来确定所述妇女的分娩进展。
根据本发明的一个实施例,磁场传感器阵列包含板,所述板放置在妇女所躺在的分娩床的床垫下方或上方。
根据本发明的一个实施例,磁场传感器阵列包含板,所述板放置在妇女所躺在的分娩床的附近但不在其上。
根据本发明的一个实施例,至少一个跟踪装置以三个自由度提供空间信息。
根据本发明的一个实施例,至少一个跟踪装置以六个自由度提供空间信息。
根据本发明的一个实施例,至少一个跟踪装置包含附着到妇女的下背部、棘突或骨盆上或附近的下背部或骨盆传感器。
根据本发明的一个实施例,至少一个跟踪装置包含超声传感器。
根据本发明的一个实施例,至少一个跟踪装置包含测斜仪。
根据本发明的一个实施例,至少一个跟踪装置包含手指传感器。
根据本发明的一个实施例,使用跟踪装置相对于胎儿的位置来确定妇女的分娩进展包含确定胎儿的头部的高度和/或确定胎儿的头部的位置和角度取向。
附图说明
本文仅通过举例的方式,参考附图描述本发明,在所述附图中:
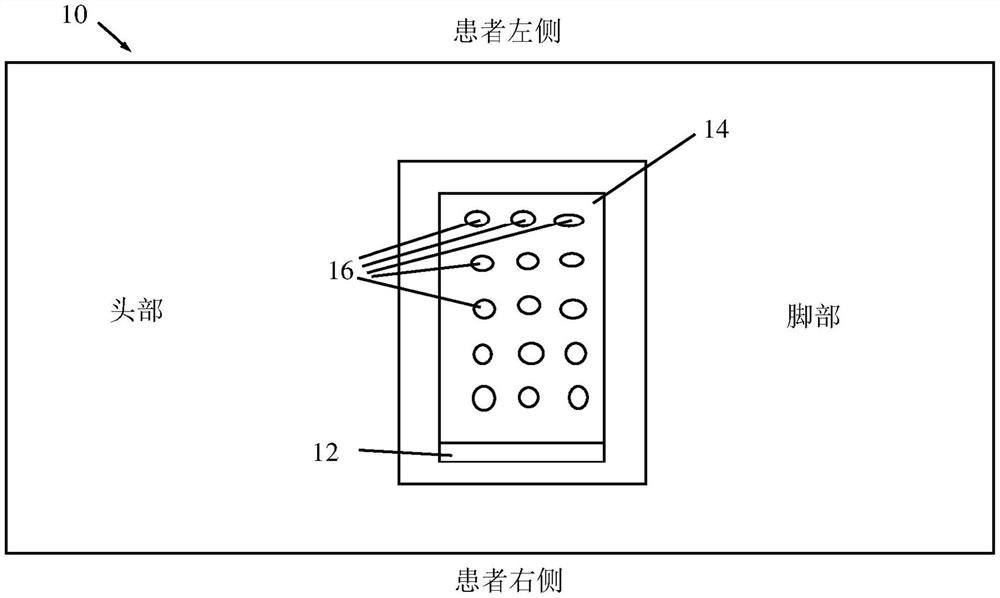
图1是根据本发明的一个实施例构造和操作的用于监测分娩进展的磁性跟踪系统的示意图;
图2是磁性跟踪系统的简化框图;和
图3是根据本发明的一个实施例的使用磁性跟踪系统的方法的简化流程图。
具体实施方式
现在参考图1和图2,其示出了根据本发明的一个实施例构造和操作的磁性跟踪系统10。
磁性跟踪系统10包含主电子模块(也称为控制器或处理器)12和磁场传感器阵列14,所述磁场传感器阵列可以呈板的形式。磁场传感器阵列14替代了现有技术跟踪器的平面发射器,并提供了显著不同和改进的功能。
磁性跟踪系统10还包含被跟踪的装置,其代替了现有技术的跟踪器的位置传感器。在现有技术中,传感器是无源的。相比之下,在本发明中,被跟踪的装置产生磁场,所述磁场由磁场传感器阵列14感测。无源装置会受到信号中任何噪声的不利影响;这个问题在本发明的有源装置的情况下已被大大减少并且可以忽略不计。与使用有源装置进行处理相比,处理来自无源装置的信息所需的处理也要麻烦得多并且花费更多的时间。
被跟踪的装置可以是产生磁场的磁体或线圈或一组线圈。
磁场传感器阵列14可以是但不限于放置在分娩床的床垫下方或上方或定位在床侧的扁平矩形板(或其它形状)。传感器阵列14可以但不限于被构造为具有内置的磁性传感器16的阵列的电子板。
传感器16感测由被跟踪的装置产生的磁场。基于感测到的磁场,磁场传感器阵列14识别被跟踪的装置的位置。磁性传感器16与控制器12通信,所述控制器处理感测到的信息并提供由被跟踪的装置感测到的分娩进展的显示,例如但不限于胎儿先露部相对于母亲的骨盆骨头上预定点的位置、颈管消失、宫颈扩张、宫颈位置等等。
被跟踪的装置之一可以是下背部或骨盆传感器20。表2给出了传感器20的非限制性参数。
下背部传感器20可以是通过覆盖L5棘突的标贴附着到患者背部的盘状磁体,所述标贴在整个监测期间都保持在原位。下背部传感器20在分娩期间用作位置参考传感器,并提供3个DOF位置数据。下背部传感器20产生磁场,所述磁场由磁场传感器阵列14感测。
被跟踪的装置之一可以是超声传感器22。表3给出了传感器22的非限制性参数。
超声传感器22可以在已知位置处附接到标准超声系统的腹部探头,从而允许将由超声探头产生的图像中的每个像素精确地映射到板的3D操作空间。传感器22提供探头的空间位置和取向(6个DOF),有助于超声图像中所有像素的相对3D定位。超声波传感器22产生磁场,所述磁场由磁场传感器阵列14感测。基于这个感测到的磁场,磁场传感器阵列14识别超声传感器22(3个DOF)的位置。为了提供取向数据,测斜仪23(例如,IMU-惯性测量单元)可以附接到超声传感器22上或者可以是超声传感器22的一部分。
测斜仪提供的数据可用于控制每个线圈的电流,从而能够控制磁场的方向。
超声传感器22可以提供胎儿的高度(胎儿头部相对于母亲的骨盆下降了多少;如果胎儿头部与坐骨棘齐平,则胎儿高度为零)。测斜仪23提供关于超声探头的空间位置的信息,从而允许确定胎儿头部的位置和角度取向(例如,胎儿头部相对于骨盆的角度)以及在插入之前和期间计算针的轨迹。
被跟踪的装置之一可以是磁性手指传感器24。表4给出了手指传感器24的非限制性参数。
传感器24是附着到用户的指尖的磁体,并且可以放置在手套下。传感器24通过触摸两个关注点来提供这些点之间的距离的标尺状测量,并确定它们的空间位置。传感器24提供3个DOF位置数据。
所有位置数据均可以通过USB连接或以无线方式传输到主机控制器12。
源自磁体倾斜角的任何误差都可以使用适当的误差校正方法进行校正。
磁体或磁性传感器可以已知的预定空间位置和取向放置在任何跟踪装置(例如,任何超声探头或任何其它装置)上。已知的空间位置和取向可以用于系统的校准,以便被跟踪的装置的空间位置和取向可以由系统监测。任何接口都可以用于数据传输,例如USB、HDMI和许多其它接口。
表1:平板电子板的一般要求
表2:孕妇背部磁体跟踪要求
表3:超声探头跟踪要求
表4:手指磁体跟踪要求
- 分娩磁性跟踪系统
- 一种水下目标磁性定位跟踪系统与方法