一种集成开关柜的安全维护联锁装置
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及开关柜设备技术领域,具体涉及一种集成开关柜的安全维护联锁装置。
背景技术
随着开关设备技术的发展,铠装移开式开关设备(开关柜)的运用越来越广泛,同时对开关设备的安全可靠性要求也越来越高。开关设备在设计生产过程中,不仅仅要考虑开关设备的运行可靠性,同时也要考虑开关设备在日常维护或维修过程中,避免因操作人员的误操作而引发的设备爆炸事故和人员伤亡事故。开关设备中,为避免因操作人员的误操作而引发的安全事故,开关设备应设置完善可靠的后下门联锁,后下门需具备以下联锁功能:联锁一:在开关柜的电缆室内的带电部件不带电的情况下,后下门才可打开。工作原理:首先将隔离手车操作至试验位置,此时电缆室内的带电部件断电,后下门才应该能打开,维修前对带电部件进行验放电后,在挂接地位置挂上接地线,此时可进行相关的维修工作;联锁二:必须在后下门关闭的情况下,电缆室内带电部件才能通电运行。工作原理:维修结束后,先解开挂接地位置上的接地线,再关闭后下门,此时隔离手车可操作至工作位置,带电部件才可通电运行。
目前,很多开关设备生产厂家生产的开关设备,存在设计缺陷,后下门联锁不完善,只具备联锁一功能,而不具备第联锁二功能,这样给开关设备和操作人员带来极大的安全隐患,即若不具备联锁二,在维修结束后由于操作人员的原因,没有及时取下接地位置上的接地线,后下门没有关闭,带电部件处于接地状态,若此时将隔离手车从试验位置操作至工作位置并通电,带电部件接地短路,从而造成严重的开关设备瞬间短路爆炸事故,甚至危及操作人员的生命安全及其它设备安全。
而且,现在的应用的联锁机构采用电磁铁、位置开关、感应器、微动开关等电控装置实现信号联动、锁止,这类电控装置依赖电源、信号,当开关柜所处环境出现干扰,电控装置便会失效,无法保证联锁装置的稳定可靠,无法在极端环境下应用。
本发明为了解决上述技术的不足,提供了一种纯机械式结构自动联锁反应的集成开关柜安全维护联锁装置。
本发明的技术方案:一种集成开关柜的安全维护联锁装置,所述集成开关柜包括柜体,该柜体设有电缆室及手车室,所述柜体后端下方位置安装有封闭电缆室的后下门,所述手车室安装有隔离手车,所述电缆室安装有带电部件,该隔离手车设置为能够在工作位置和试验位置之间移动的结构,所述后下门与柜体铰接配合,包括闭门位置及打开位置,所述联锁装置包括门轴件、基座及第一联锁机构,所述门轴件与后下门门轴同轴固定连接,所述基座与门轴相垂直并设置于柜体内,包括与门轴件位置、高度对齐的锁止端,及水平延伸至相对隔离手车试验位置的限位端,所述基座朝向门轴件的端面上设有由锁止端至限位端的第一联动槽,所述隔离手车上设有延伸至基座位置的定位轴,所述第一联锁机构包括第一限位翻转块、第二翻转块、连杆及翻转块复位件,所述第一限位翻转块与第二翻转块上均设有铰接孔及连杆孔,所述门轴件上设有朝向并与第一联动槽对齐的第一限转槽,所述第一翻转块铰接设置于第一联动槽内相对锁止端门轴件位置处,并延伸至第一限转槽内与其侧壁抵触,所述第二翻转块铰接设置于第一联动槽内,相对工作位置处朝向锁止端的一侧并与定位轴抵触,并延伸至定位轴随隔离手车移动的轨迹内,所述连杆两端分别与第一、第二翻转块连杆孔铰接形成连杆运动,所述第一、第二翻转块上均设有翻转块复位件,驱使第一、第二翻转块回复至越出第一联动槽的姿态。
采用上述技术方案,当需要对开关柜内的电缆室的停电、打开维修操作时,首先要将隔离手车从工作位置移动至试验位置,此时电缆室内的带电部件方才断电。
因此本发明通过门轴件、基座及第一连锁机构的设置,让门轴件随下后门同轴联动旋转,基座的两端设置成由门轴件位置处的锁止端延伸至隔离手车试验位置正下方的限位端,且根据常规隔离手车皆是在工作位置与试验位置之间水平移动,将基座也设置为水平姿态。
然后在门轴件及基座上对应设置第一联动槽及第一限转槽,第一联动槽的作用是放置第一翻转块、第二翻转块,供其与连杆形成连杆运动时,两个翻转块能够埋入或越出第一联动槽,第一限转槽的作用是与越出第一联动槽的第一翻转块部位接触配合。
其工作原理是:通过第二翻转块铰接设置于第一联动槽内,相对工作位置处朝向锁止端的一侧并与定位轴抵触,当隔离手车处于工作位置时,隔离手车上设置的延伸至基座位置的定位轴也相对处于工作位置。此时,第二翻转块预设为越出第一联动槽的姿态,并与定位轴抵触,而与第二翻转块呈连杆运动的第一翻转块同样越出第一联动槽,延伸在门轴件的第一限转槽内与其抵触,导致门轴件被锁死,下后门无法反正打开。
只有当隔离手车离开工作位置,定位轴随其离开不再抵触第二翻转块,此时连杆运动不再受到外力阻碍,第一翻转块也不再限制门轴件旋转,下后门才能够顺利打开。
而当维护完毕,下后门关闭后,翻转块复位件再次驱动第一、第二翻转块回复至越出第一联动槽的姿态,即第一连锁机构最初的状态,待定位轴随隔离手车回到工作位置,便会再次抵触第二翻转块,联动锁死下后门打开。
通过这样的纯机械连锁反应,无需电气回路控制,无需电控装置驱动,稳定可靠,只有当隔离手车离开工作位置,确保了带电部位断电后,下后门才能被打开,保护了操作人员的安全。
本发明的进一步设置:所述基座朝向门轴件的端面上设有由锁止端至试验位置的第二联动槽,所述联锁装置还包括第二联锁机构,包括第三翻转块、第四翻转块、连杆及翻转块复位件,所述第三翻转块与第四翻转块上均设有铰接孔及连杆孔,所述门轴件上设有朝向并与第二联动槽对齐的第二限转槽,所述第三翻转块铰接设置于第二联动槽内相对锁止端门轴件位置处,并延伸至第二限转槽内与其侧壁抵触,所述第四翻转块铰接设置于第二联动槽内,相对试验位置处,并延伸至定位轴随隔离手车移动的轨迹内,所述连杆两端分别与第三、第四翻转块连杆孔铰接形成连杆运动,所述第三、第四翻转块上均设有翻转块复位件,驱使第三、第四翻转块回复至越出第二联动槽的姿态。
采用上述技术方案,通过在门轴件、基座上设置第二限转槽、第二联动槽及第二连锁机构,第三翻转块与第二限转槽联动配合,所述第四翻转块铰接设置于第二联动槽内,相对试验位置处,并延伸至定位轴随隔离手车移动的轨迹内。
其工作原理是:当隔离手车离开工作位置,但还未到达试验位置时,第四翻转块还未与定位轴接触,没有被定位轴的移动翻转进入第二联动槽,依然受到翻转块复位件保持越出第二联动槽姿态的力量,对门轴件打开施加一定的阻力。
第一连锁机构解除了抵触限转,但同样对门轴件还保有翻转块复位件的阻力。
此时操作人员便能从下后门打开的力度中感应到不同,得知隔离手车没有正确到达试验位置,得到警示。
而当定位轴准确到达试验位置时,接触到移动轨迹中的第四翻转块,驱动其克服翻转块复位件的阻力旋入第二联动槽,第二连锁机构连锁反应后,随即不再对门轴件的第二限转槽施加阻力。这是施加在下后门的阻力变只有第一联锁机构的翻转块复位件,阻力顿时降为一半。该警示效果明显,能在维护工作的第一步,打开下后门的过程中发觉隔离手车的移动是否到位,避免了事故的方式。
本发明的进一步设置:所述基座朝向门轴件的端面上设有由锁止端至试验位置的第三联动槽,所述联锁装置还包括第三联锁机构,包括第五翻转块、第六限位翻转块、连杆及翻转块复位件,所述第五翻转块与第六限位翻转块上均设有铰接孔及连杆孔,所述门轴件上设有延伸至第三联动槽内的翻转勾爪,所述第五翻转块铰接设置于第三联动槽内相对锁止端门轴件位置处,并延伸至翻转勾爪旋转路径内,所述第六翻转块铰接设置于第二联动槽内,相对试验位置处靠近门轴件的一侧,并延伸至定位轴随隔离手车移动的轨迹内,所述连杆两端分别与第五、第六翻转块连杆孔铰接形成连杆运动,所述第五、第六翻转块上均设有翻转块复位件,驱使第五、第六翻转块回复至旋入第三联动槽内的姿态,所述下后面翻转至打开位置时,所述翻转勾爪旋转拨动第五翻转块旋转越出第三联动槽。
采用上述技术方案,在下后门旋转至打开位置时,门轴件上的翻转勾爪随其旋转,旋转过程中,碰撞到路径内的第五翻转块,勾爪将其勾起,越出第三联动槽,连带第三联锁机构联动,使第六翻转块同样越出第三联动槽,挡在相对试验位置处靠近门轴件的一侧,限制定位轴由试验位置向工作位置移动。
通过这样的设置,当下后门打开时,第三联锁机构限制隔离手车向工作位置移动,防止维护过程中,隔离手车意外移动到工作位置,造成带电部位通电事故的发生。
本发明的进一步设置:所述翻转块复位件为扭簧。
采用上述技术方案,通过设置的扭簧,当外力翻转块旋转位移后,驱使扭簧变形蓄力,当外力消失时,扭簧驱使翻转块旋转复位。
本发明的进一步设置:所述门轴件呈与门轴向同轴设置的圆柱形,所述第一、第二限转槽设置于圆柱外周面且横截面均呈扇形,该扇形限转槽包括与下后门平行的第一限位面,所述第一限位面位于第一、第三翻转块相对限位端一侧。
采用上述技术,当下后门打开时(逆时针旋转打开),第一限位面可以触碰驱动第一翻转块、第三翻转块旋转,翻转勾爪可以驱动第五翻转块旋转,根据隔离手车及定位轴的不同位置,第一、二、三联锁机构的不同状态,控制后下门的状态。
而且圆柱形的门轴件及扇形限转槽的设计,让翻转块能够主动单向与第一限位面抵触,限制下后门打开,而当外力消失,下后门主动旋转打开时,门轴件和扇形限转槽围绕门轴周转,可以将翻转块排出限转槽,呈与圆柱外周面相切的状态,防止其卡在限转槽内影响下后门旋转。
附图说明
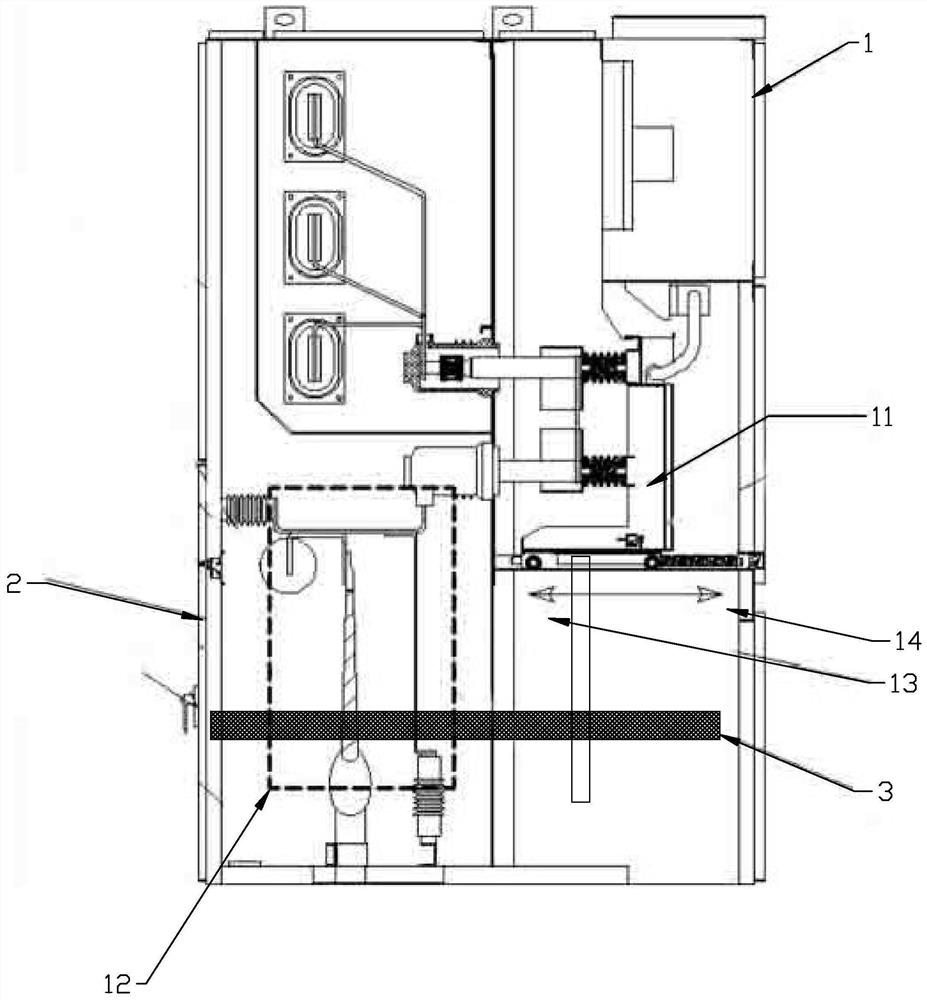
图1为本发明实施例的结构图1;
图2为本发明实施例的联锁装置结构图1;
图3为本发明实施例的联锁装置结构图2;
图4为图3中A-A处第二联锁机构剖视图;
图5为图3中B-B处第一联锁机构剖视图;
图6为图3中C-C处第三联锁机构剖视图;
图7为本发明实施例的联锁装置爆炸图。
具体实施方式
如图1-7所示,一种集成开关柜的安全维护联锁装置3,所述集成开关柜包括柜体1,该柜体1设有电缆室及手车室,所述柜体1后端下方位置安装有封闭电缆室的后下门2,所述手车室安装有隔离手车11,所述电缆室安装有带电部件12,该隔离手车11设置为能够在工作位置13和试验位置14之间移动的结构,所述后下门2与柜体1铰接配合,包括闭门位置15及打开位置16,所述联锁装置3包括门轴件4、基座5及第一联锁机构6,所述门轴件4与后下门2门轴同轴固定连接,所述基座5与门轴相垂直并设置于柜体1内,包括与门轴件4位置、高度对齐的锁止端51,及水平延伸至相对隔离手车11试验位置14的限位端52,所述基座5朝向门轴件4的端面上设有由锁止端51至限位端52的第一联动槽53,所述隔离手车11上设有延伸至基座5位置的定位轴111,所述第一联锁机构6包括第一翻转块61、第二翻转块62、连杆63及翻转块复位件64,所述第一翻转块61与第二翻转块62上均设有铰接孔及连杆63孔,所述门轴件4上设有朝向并与第一联动槽53对齐的第一限转槽41,所述第一翻转块61铰接设置于第一联动槽53内相对锁止端51门轴件4位置处,并延伸至第一限转槽41内与其侧壁抵触,所述第二翻转块62铰接设置于第一联动槽53内,相对工作位置13处朝向锁止端51的一侧并与定位轴111抵触,并延伸至定位轴111随隔离手车11移动的轨迹内,所述连杆63两端分别与第一、第二翻转块62连杆63孔铰接形成连杆63运动,所述第一、第二翻转块62上均设有翻转块复位件64,驱使第一、第二翻转块62回复至越出第一联动槽53的姿态。
当需要对开关柜内的电缆室的停电、打开维修操作时,首先要将隔离手车11从工作位置13移动至试验位置14,此时电缆室内的带电部件12方才断电。
因此本发明通过门轴件4、基座5及第一连锁机构的设置,让门轴件4随下后门同轴联动旋转,基座5的两端设置成由门轴件4位置处的锁止端51延伸至隔离手车11试验位置14正下方的限位端52,且根据常规隔离手车11皆是在工作位置13与试验位置14之间水平移动,将基座5也设置为水平姿态。
然后在门轴件4及基座5上对应设置第一联动槽53及第一限转槽41,第一联动槽53的作用是放置第一翻转块61、第二翻转块62,供其与连杆63形成连杆63运动时,两个翻转块能够埋入或越出第一联动槽53,第一限转槽41的作用是与越出第一联动槽53的第一翻转块61部位接触配合。
其工作原理是:通过第二翻转块62铰接设置于第一联动槽53内,相对工作位置13处朝向锁止端51的一侧并与定位轴111抵触,当隔离手车11处于工作位置13时,隔离手车11上设置的延伸至基座5位置的定位轴111也相对处于工作位置13。此时,第二翻转块62预设为越出第一联动槽53的姿态,并与定位轴111抵触,而与第二翻转块62呈连杆63运动的第一翻转块61同样越出第一联动槽53,延伸在门轴件4的第一限转槽41内与其抵触,导致门轴件4被锁死,下后门无法反正打开。
只有当隔离手车11离开工作位置13,定位轴111随其离开不再抵触第二翻转块62,此时连杆63运动不再受到外力阻碍,第一翻转块61也不再限制门轴件4旋转,下后门才能够顺利打开。
而当维护完毕,下后门关闭后,翻转块复位件64再次驱动第一、第二翻转块62回复至越出第一联动槽53的姿态,即第一连锁机构最初的状态,待定位轴111随隔离手车11回到工作位置13,便会再次抵触第二翻转块62,联动锁死下后门打开。
通过这样的纯机械连锁反应,无需电气回路控制,无需电控装置驱动,稳定可靠,只有当隔离手车11离开工作位置13,确保了带电部位断电后,下后门才能被打开,保护了操作人员的安全。
所述基座5朝向门轴件4的端面上设有由锁止端51至试验位置14的第二联动槽54,所述联锁装置3还包括第二联锁机构7,包括第三翻转块71、第四翻转块72、连杆63及翻转块复位件64,所述第三翻转块71与第四翻转块72上均设有铰接孔及连杆63孔,所述门轴件4上设有朝向并与第二联动槽54对齐的第二限转槽42,所述第三翻转块71铰接设置于第二联动槽54内相对锁止端51门轴件4位置处,并延伸至第二限转槽42内与其侧壁抵触,所述第四翻转块72铰接设置于第二联动槽54内,相对试验位置14处,并延伸至定位轴111随隔离手车11移动的轨迹内,所述连杆63两端分别与第三、第四翻转块72连杆63孔铰接形成连杆63运动,所述第三、第四翻转块72上均设有翻转块复位件64,驱使第三、第四翻转块72回复至越出第二联动槽54的姿态。
通过在门轴件4、基座5上设置第二限转槽42、第二联动槽54及第二连锁机构,第三翻转块71与第二限转槽42联动配合,所述第四翻转块72铰接设置于第二联动槽54内,相对试验位置14处,并延伸至定位轴111随隔离手车11移动的轨迹内。
其工作原理是:当隔离手车11离开工作位置13,但还未到达试验位置14时,第四翻转块72还未与定位轴111接触,没有被定位轴111的移动翻转进入第二联动槽54,依然受到翻转块复位件64保持越出第二联动槽54姿态的力量,对门轴件4打开施加一定的阻力。
第一连锁机构解除了抵触限转,但同样对门轴件4还保有翻转块复位件64的阻力。
此时操作人员便能从下后门打开的力度中感应到不同,得知隔离手车11没有正确到达试验位置14,得到警示。
而当定位轴111准确到达试验位置14时,接触到移动轨迹中的第四翻转块72,驱动其克服翻转块复位件64的阻力旋入第二联动槽54,第二连锁机构连锁反应后,随即不再对门轴件4的第二限转槽42施加阻力。这是施加在下后门的阻力变只有第一联锁机构6的翻转块复位件64,阻力顿时降为一半。该警示效果明显,能在维护工作的第一步,打开下后门的过程中发觉隔离手车11的移动是否到位,避免了事故的方式。
所述基座5朝向门轴件4的端面上设有由锁止端51至试验位置14的第三联动槽55,所述联锁装置3还包括第三联锁机构8,包括第五翻转块81、第六翻转块82、连杆63及翻转块复位件64,所述第五翻转块81与第六翻转块82上均设有铰接孔及连杆63孔,所述门轴件4上设有延伸至第三联动槽55内的翻转勾爪44,所述第五翻转块81铰接设置于第三联动槽55内相对锁止端51门轴件4位置处,并延伸至翻转勾爪44旋转路径内,所述第六翻转块82铰接设置于第二联动槽54内,相对试验位置14处靠近门轴件4的一侧,并延伸至定位轴111随隔离手车11移动的轨迹内,所述连杆63两端分别与第五、第六翻转块82连杆63孔铰接形成连杆63运动,所述第五、第六翻转块82上均设有翻转块复位件64,驱使第五、第六翻转块82回复至旋入第三联动槽55内的姿态,所述下后面翻转至打开位置16时,所述翻转勾爪44旋转拨动第五翻转块81旋转越出第三联动槽55。
在下后门旋转至打开位置16时,门轴件4上的翻转勾爪44随其旋转,旋转过程中,碰撞到路径内的第五翻转块81,勾爪将其勾起,越出第三联动槽55,连带第三联锁机构8联动,使第六翻转块82同样越出第三联动槽55,挡在相对试验位置14处靠近门轴件4的一侧,限制定位轴111由试验位置14向工作位置13移动。
通过这样的设置,当下后门打开时,第三联锁机构8限制隔离手车11向工作位置13移动,防止维护过程中,隔离手车11意外移动到工作位置13,造成带电部位通电事故的发生。
所述翻转块复位件64为扭簧。
通过设置的扭簧,当外力翻转块旋转位移后,驱使扭簧变形蓄力,当外力消失时,扭簧驱使翻转块旋转复位。
所述门轴件4呈与门轴向同轴设置的圆柱形,所述第一、第二限转槽42设置于圆柱外周面且横截面均呈扇形,该扇形限转槽包括与下后门平行的第一限位面46,所述第一限位面46位于第一、第三翻转块71相对限位端52一侧。
当下后门打开时(逆时针旋转打开),第一限位面46可以触碰驱动第一翻转块61、第三翻转块71旋转,翻转勾爪44可以驱动第五翻转块81旋转,根据隔离手车11及定位轴111的不同位置,第一、二、三联锁机构的不同状态,控制后下门2的状态。
而且圆柱形的门轴件及扇形限转槽的设计,让翻转块能够主动单向与第一限位面46抵触,限制下后门打开,而当外力消失,下后门主动旋转打开时,门轴件和扇形限转槽围绕门轴周转,可以将翻转块排出限转槽,呈与圆柱外周面相切的状态,防止其卡在限转槽内影响下后门旋转。
- 一种集成开关柜的安全维护联锁装置
- 一种安全性能好的联锁装置及联锁开关柜