一种智能弯管器
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及管件加工技术领域,更具体地涉及一种智能弯管器。
背景技术
目前,楼房室内装修给水系统中PE-RT给水管道布局时,转角处需要对PE-RT给水管进行弯折,而现有技术中,人们通常对给水管道直接进行弯折处理,即通常直接采用人工进行弯管,导致劳动强度大。
鉴于此,有必要提供一种智能弯管器以解决上述缺陷。
发明内容
本发明所要解决的技术问题是提供一种智能弯管器。
为解决上述技术问题,本发明提供一种智能弯管器,其包括有:
底板;
加热机构,设置于底板上,包括有一加热室、固定于加热室外壁的电加热片以及用于检测加热室温度的温度传感器;
控制器,与所述温度传感器连接,以根据来自温度传感器的信息控制电加热片工作。
其进一步技术方案为:所述底板中部设置有一柱体,且该底板上环绕所述柱体外侧设置有角度刻度。
其进一步技术方案为:所述智能弯管器还包括有夹紧机构,所述夹紧机构包括定位板以及夹紧组件,所述定位板位于所述柱体一侧,所述夹紧组件包括第二驱动组件以及夹紧板,所述夹紧板与第二驱动组件连接,以在第二驱动组件的驱动下向定位板方向移动,从而夹紧管道。
其进一步技术方案为:所述第二驱动组件包括气缸,所述气缸缸体安装于所述底板上,其活塞杆与夹紧板连接。
其进一步技术方案为:所述底板上环绕所述柱体外侧设置有贯通的调节槽,所述智能弯管器还包括有折弯机构,所述折弯机构设置于所述柱体另一侧,包括有第一驱动组件、曲柄连杆组件以及推杆,所述推杆位于调节槽内,所述曲柄连杆组件两端分别与第一驱动组件和推杆连接,以在第一驱动组件的驱动下移动,从而推动推杆在调节槽内移动,以弯折管道。
其进一步技术方案为:所述曲柄连杆组件包括曲柄和连杆,所述曲柄一端与第一驱动组件连接,另一端与连杆一端连接,所述连杆另一端与推杆连接。
其进一步技术方案为:所述第一驱动组件包括电机、导轨、位于导轨上的丝杆以及套设于导轨及丝杆之上的滑块,所述曲柄连杆组件通过一螺杆安装于滑块上,所述电机与控制器连接,且位于导轨的一侧并与所述丝杆相连。
其进一步技术方案为:所述底板上设置有控制按钮,所述控制按钮与控制器连接,以控制智能弯管器的工作。
与现有技术相比,本发明的智能弯管器中管道可置于加热室中,电加热片工作,对位于加热室内的管道进行加热,同时温度传感器检测加热室的温度,控制器根据来自温度传感器的信息控制电加热片工作,在加热室的温度达到预定温度时,电加热片停止工作,此时可将加热后的管道取出用手弯曲,加热后的管道易于弯曲,可减少用户弯管的劳动强度。
附图说明
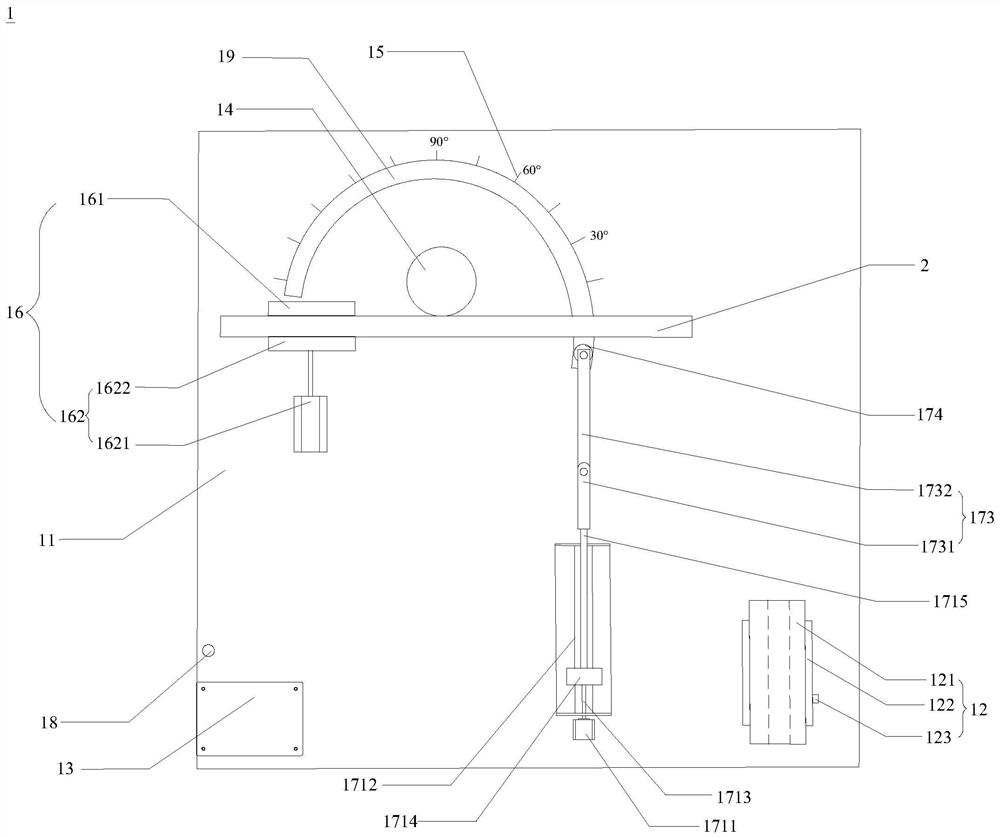
图1是本发明智能弯管器一实施例的俯视示意图。
图2是本发明智能弯管器中曲柄连杆组件和推杆的侧视示意图。
具体实施方式
为使本领域的普通技术人员更加清楚地理解本发明的目的、技术方案和优点,以下结合附图和实施例对本发明做进一步的阐述。
参照图1,图1为本发明智能弯管器1一具体实施例的俯视示意图。在附图所示的实施例中,所述智能弯管器1包括有底板11、加热机构12以及控制器;其中,所述加热机构12设置于底板11上,包括有一加热室121、固定于加热室121外壁的电加热片122以及用于检测加热室121温度的温度传感器123;所述控制器与所述温度传感器123连接,以根据来自温度传感器123的信息控制电加热片122工作,本实施例中,底板11上固定安装有一控制电路板13,所述控制器集成于该控制电路板13上,且所述控制器可基于DSP控制芯片来实现。本发明的智能弯管器1使用时,管道2可置于加热室121中,电加热片122工作,对位于加热室121内的管道2进行加热,同时温度传感器123检测加热室121的温度,控制器根据来自温度传感器123的信息控制电加热片122工作,在加热室121的温度达到预定温度(本实施例中,可为50-80℃)时,电加热片122停止工作,此时可将加热后的管道2取出用手弯曲,加热后的管道2易于弯曲,可有效降低劳动强度。
在某些实施例中,所述底板11中部设置有一柱体14,且该底板11上环绕所述柱体14外侧设置有角度刻度15。基于该设计,当弯折管道2时,将待弯折处放置于柱体14处,再手动弯折,可通过设置于底板11上的角度刻度15确定弯折的角度,以控制管道2的弯折角度。
在某些实施例中,所述智能弯管器1还包括有夹紧机构16,所述夹紧机构16包括定位板161以及夹紧组件162,所述定位板161位于所述柱体14一侧,所述夹紧组件162包括第二驱动组件以及夹紧板1622,所述夹紧板1622与第二驱动组件连接,以在第二驱动组件的驱动下向定位板161方向移动,从而夹紧管道2。具体地,所述第二驱动组件包括气缸1621,所述气缸1621缸体安装于所述底板11上,其活塞杆与夹紧板1622连接。基于该设计,气缸1621工作时,活塞杆伸出,夹紧板1622被推出,向定位板161方向移动,以夹紧位于定位板161与该夹紧板1622之间的管道2。
优选地,在某些其他实施例中,所述定位板161和夹紧板1622相对的侧面上均可开设一与管道2轮廓相对应的弧形槽,以适应于管道2形状,更便于夹紧管道2。
在本实施例中,所述底板11上环绕所述柱体14外侧设置有贯通的调节槽19,所述智能弯管器1还包括有折弯机构,所述折弯机构设置于所述柱体14另一侧,包括有第一驱动组件、曲柄连杆组件173以及推杆174,所述推杆174位于调节槽19内,所述曲柄连杆组件173两端分别与第一驱动组件和推杆174连接,以在第一驱动组件的驱动下移动,从而推动推杆174在调节槽19内移动,以弯折管道2。优选地,本实施例中,所述角度刻度15环绕所述调节槽19外侧而设置。
继续参照图1并参照图2,具体地,所述曲柄连杆组件173包括曲柄1731和连杆1732,所述曲柄1731一端与第一驱动组件连接,另一端与连杆1732一端连接,所述连杆1732另一端与推杆174连接;所述第一驱动组件包括电机1711、导轨1712、位于导轨1712上的丝杆1713以及套设于导轨1712及丝杆1713之上的滑块1714,所述曲柄1731通过一螺杆1715安装于滑块1714上,所述电机1711与控制器连接,且位于导轨1712的一侧并与所述丝杆1713相连。本实施例中,所述电机1711接收到来自控制器的指令后转动,使得与所述电机1711相连的丝杆1713旋转,从而带动套设于所述丝杆1713上的滑块1714移动,进而带动与滑块1714通过螺杆1715连接的曲柄1731移动,以使得推杆174在曲柄连杆组件173的作用下沿调节槽19移动。
可理解地,在某些实施例中,在底板11上还可设置控制按钮18,以控制智能弯管器1工作,或/以及在管道2的弯折角度达到预设角度时,发送信号至控制器以控制第一驱动组件和夹紧机构16,以使其返回初始位置。
下面对所述智能弯管器1的工作过程进行详细的描述:
管道2置于加热室121中时,电加热片122工作,对位于加热室121内的管道2进行加热,同时温度传感器123检测加热室121的温度,控制器根据来自温度传感器123的信息控制电加热片122工作,在加热室121的温度达到预定温度时,电加热片122停止工作,此时可将加热后的管道2取出,再将管道2待弯折处放置于柱体14处,通过控制按钮18发送信号至控制器,促使气缸1621工作,活塞杆伸出,与之连接的夹紧板1622被推出,向定位板161方向移动,以夹紧位于定位板161与该夹紧板1622之间的管道2,并发送信号至电机1711,电机1711转动,使得与所述电机1711相连的丝杆1713旋转,从而带动套设于所述丝杆1713上的滑块1714向靠近管道2的方向移动,进而带动与滑块1714通过螺杆1715连接的曲柄1731移动,连杆1732在曲柄1731的驱动下使得连接于其末端的推杆174运动,当推杆174与管道2抵接时,管道2在推板174的作用下移动从而弯折,而由于推杆174位于调节槽19内,则推杆174在调节槽19内移动,其运动轨迹受调节槽19限制,则通过设置于调节槽19外侧的角度刻度15可查看管道2弯折角度是否符合用户需求,当管道2的弯折角度符合用户预期时,第一驱动组件和夹紧机构16返回初始位置,即气缸1621缩回,且电机1711反向转动,以使得夹紧板1622和推杆174回复原位,此时弯折后的管道2被松开,用户可轻松取出根据实际需求弯折后的管道2,整个弯折过程结束。
综上可知,本发明的智能弯管器结构简单,管道通过电加热片加热后,用户可手动弯管,也可通过折弯机构替代人工操作去弯折管道,以有效降低劳动强度,且因底板上设置有角度刻度,弯折角度易控制。
以上所述仅为本发明的优选实施例,而非对本发明做任何形式上的限制。本领域的技术人员可在上述实施例的基础上施以各种等同的更改和改进,凡在权利要求范围内所做的等同变化或修饰,均应落入本发明的保护范围之内。
- 一种基于双机器人弯管系统的智能弯管轨迹的生成方法
- 一种液冷板渐弯式智能弯管一体机