一种定向电枢电流的直流电动机及直流电动机控制方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及电动机技术领域,尤其涉及一种定向电枢电流的直流电动机及直流电动机控制方法。
背景技术
传统的直流电动机的外部直流电流通过电刷和换向器的相对配合作用,变换成电枢载流绕组中的交流,实现定子N极下和S极下的转子电枢载流绕组都能产生同旋转方向的电磁转矩,达到把电能转换成机械能的目的。直流电动机在运行过程中因电枢电流的换向问题导致换向火花,影响电机性能,增大了电机的维修量,同时因换向问题使得直流电机的可靠性和工作环境受到限制。
发明内容
(一)要解决的技术问题
鉴于现有技术的上述缺点和不足,本发明提供一种定向电枢电流的直流电动机及直流电动机控制方法,其解决了直流电机换向时产生换向火花以及直流电机的可靠性和工作环境受限制的技术问题。
(二)技术方案
为了达到上述目的,本发明的定向电枢电流的直流电动机包括:
所述直流电动机的转子在运行过程中,转子内的电枢载流绕组的电流始终为一个方向的电流;
其中,所述直流电动机的定子包括:绕转子轴对称分布的多对励磁绕组,每一对所述励磁绕组根据励磁策略产生指定的磁极;
定子在转子的导引下,产生随转子位置变化的两相或两相以上的轮流励磁的交替磁势,以使所述电枢载流绕组在各磁极的磁势下产生同一个方向电流所属的电磁转矩。
可选地,定子包括:具有定子轭的定子铁芯和四个及以上的所述励磁绕组,四个及以上的所述励磁绕组均匀布置在所述定子铁芯的内圆周上;
绕转子轴对称分布的两个所述励磁绕组构成一对磁极;
所述励磁绕组为凸极结构;
每相所述励磁绕组均分别由独立的H桥供电
可选地,所述磁极的弧长L=0.9τ,τ为极距;
四个及以上的所述励磁绕组的绕制方向相同;
所述励磁绕组为四个,两对时,四个所述磁极分别为A1、A2、B1和 B2;其中,A1和A2绕转子轴对称分布,构成A相励磁绕组;B1和B2绕转子轴对称分布,构成B相励磁绕组;
H桥供电结构供电包括第一时段供电、第二时段供电、第三时段供电以及第四时段供电;其中,第一时段供电时,A1为N极,A2为S极,B1和 B2不进行供电;第二时段供电时,A1和A2不进行供电,B1为N极,B2 为S极;第三时段供电时,A1为S极,A2为N极,B1和B2不进行供电;第四时段供电时,A1和A2不进行供电,B1为S极,B2为N极。
可选地,电枢载流绕组包括:单层单回路电枢绕组;
所述单层单回路电枢绕组采用多匝单迭单元绕制;
所述多匝单迭单元的第一节距y1=2τ,每个转子的转子槽中嵌放一个所述多匝单迭单元的边;
第K号多匝单迭元件的首边为K,其末边为K’,对于有Z个转子槽的转子,Z/2个所述多匝单迭单元的相邻单元的首末端顺极性串联组成所述单层单回路电枢绕组。
可选地,所述直流电动机的转子轴上设置有第一滑环和第二滑环,所述电枢载流绕组的正极连接第一滑环,所述电枢载流绕组的负极连接第二滑环;
所述第一滑环和所述第二滑环均为滚珠式滑环或碳刷式滑环。
可选地,所述滚珠式滑环包括绝缘环、内圈、外圈以及多个滚珠;
所述绝缘环套设在转子轴上,所述内圈套设在所述绝缘环上,所述外圈套设在所述内圈上,所述滚珠设置于所述内圈和所述外圈之间;
所述内圈、所述外圈以及所述滚珠均能够导电;
所述电枢载流绕组的正极连接所述第一滑环的内圈,所述电枢载流绕组的负极连接所述第二滑环的内圈。
可选地,所述控制方法包括:
第一节拍,A相励磁绕组AX供电励磁,且A1极为N磁极性,A2极为S极性,B相励磁绕组BY不励磁,磁场为零,A相励磁绕组AX中流过 +IFa电流,B相励磁电流BX中流过的电流IFb=0,电枢载流绕组S+/S-加正极性电枢电源,电枢载流绕组的电流为+Ia,电机在运行过程中,电枢载流绕组的电流+Ia方向始终保持不变;在第一节拍期间,A1极和A2极下所有电枢载流绕组与A相磁场共同作用产生顺时针方向的电磁转矩,转子顺时针方向以转速n旋转;当转子沿顺时钟方向旋转至第一设定角度时,开启B相励磁绕组的供电,B相励磁绕组BY流过+IFb电流,B1极为N极,B2极为 S极;当转子沿顺时钟方向旋转至90度时,进入第二节拍;
第二节拍,保持电枢载流绕组中的电流方向不变,停止A相励磁绕组的供电;第二节拍期间,B1极和B2极下所有电枢载流绕组与B相磁场共同作用产生顺时针方向的电磁转矩,转子顺时针方向以转速n旋转;当转子沿顺时钟方向旋转至第二设定角度时,开启A相励磁绕组的供电,A相励磁绕组 AX流过-IFa电流,A1极为S极性,A2极为N极性;当转子旋转至180度时,进入第三节拍;
第三节拍:保持电枢载流绕组中的电流方向不变,停止B相励磁绕组的供电;在第三节拍期间,A1极和A2极下所有电枢载流绕组与A相磁场共同作用产生顺时针方向的电磁转矩,拖动转子以转速n旋转;当转子沿顺时钟方向旋转至第三设定角度时,开启B相励磁绕组的供电,B相励磁绕组 BY流过-IFb电流,B1极为S极性,B2极为N极性;当转子旋转至270度时,进入第四节拍;
第四节拍:保持电枢载流绕组中的电流方向不变,停止A相励磁绕组的供电;在第四节拍期间,B1极和B2极下所有电枢载流绕组与B相磁场共同作用产生顺时针方向的电磁转矩,拖动转子以转速n旋转;当转子沿顺时钟方向旋转至第四设定角度时,开启A相励磁绕组的供电,A相励磁绕组AX 流过-IFa电流,A1极为N极性,A2极为S极性;当转子旋转至360度时,重新进入第一节拍。
可选地,所述第一设定角度为75度至85度;
所述第二设定角度为165度至175度;
所述第三设定角度为255度至265度;
所述第四设定角度为345度至355度。
(三)有益效果
定向电枢电流的直流电动机,在运行中电枢电流方向不变,不存在因电枢电流换向带来的换向问题,本发明实施例电机,利用检测电枢磁势Fa的轴线位置,控制A、B两相磁场轮流励磁工作和磁极的极性,保证励磁相磁极下对应的所有转子载流导体产生同方向的电磁力从而形成拖动电磁转矩 (非励磁相磁极下载流导体不产生电磁力,因磁通为零),换相后的励磁磁极下对应的所有转子载流导体产生与换相前同方向的拖动电磁转矩。根据初始Fa的位置(角度大小)克服起动时的死区,实现拖动系统的可逆运行。
由于电机的电枢功率大,电流大,而励磁部分所占电机功率小,电流小,在本发明定向电枢电流的直流电动机中,采用以小功率、小电流的磁场能量来控制大功率、大电流的电枢能量,这种以小博大的控制策略有益于控制和降低成本,提升性能,提高效率和功率密度,不同于永磁无刷直流电机。
附图说明
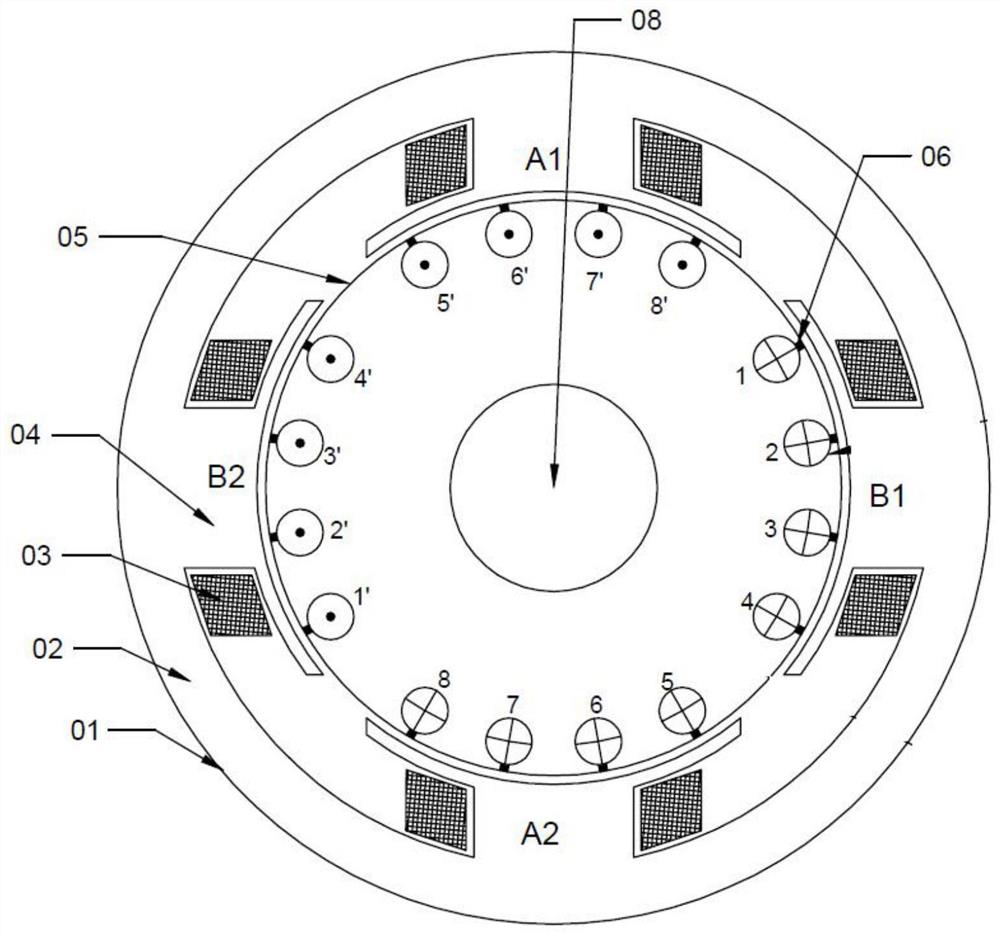
图1是本实施例四极定向电枢电流直流电动机径向结构示意图;
图2是转子结构部件示意图;
图3是滚珠式滑环结构示意图;
图4是多匝长矩单迭元件图;
图5是转子16槽8个多匝长矩单迭元件绕制的电枢绕组展开图;
图6是励磁绕组绕制结构图;
图7是A、B两相励磁绕组供电原理图;
图8零位状态下,磁极和转子位置的状态图;
图9转子顺时针转90°后定转子状态图;
图10转子顺时针转180°后定转子状态图;
图11转子顺时针转270°后定转子状态图;
图12转子顺时针转360°后定转子状态图。
【附图标记说明】
01:定子铁芯;02:定子轭;03:励磁绕组;04:磁极;05:转子铁芯; 06:转子槽;08:转子轴;11:第一滑环;12:第二滑环;13:绝缘环;14:内圈;15:滚珠;16:外圈;20:绕组连接端;21:电源连接端。
具体实施方式
为了更好地解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。其中,本文所提及的“上”、“下”......等方位名词以图1的定向为参照。
为了更好地理解上述技术方案,下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更清楚、透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
如图1所示,本发明提供了一种定向电枢电流的直流电动机,直流电动机的转子运行中,转子内的电枢载流绕组的电流始终为一个方向的电流,不存在因电枢电流换向带来的换向问题。其中,直流电动机的定子包括:绕转子轴对称分布的多对励磁绕组,每一对励磁绕组根据励磁策略产生指定的磁极。定子在转子的导引下,产生随转子位置变化的两相或两相以上的轮流励磁的交替磁势,以使电枢载流绕组在各磁极的磁势下产生同一个方向电流所属的电磁转矩。利用检测电枢磁势的轴线位置,控制各相磁场一次轮流励磁工作和磁极的极性,保证励磁相磁极下对应的所有转子载流导体产生同方向的电磁力从而形成拖动电磁转矩,换相后的励磁磁极下对应的所有转子载流导体产生与换相前同方向的拖动电磁转矩。根据初始电枢磁势的轴线位置克服起动时的死区,实现拖动系统的可逆运行。电机的电枢功率大,电流大,而励磁部分所占电机功率小,电流小,在本发明定向电枢电流直流电动机中,采用以小功率、小电流的磁场能量来控制大功率、大电流的电枢能量,有益于控制和降低成本,提升性能,提高效率和功率密度。
需要说明的是,附图中:Y1:单迭元件两有效边间跨距;Z:转子槽数; P:磁极对数;2p:磁极数;τ:极距;τ=Z/(2*p);τ=定子内圆周长/(2*P); Fa:磁势轴线;m-m’:相邻磁极的中线;k-k’:K号元件首端边为K标号,末端边为K’标号;
实施例1,如图1所示,图1为本发明实施例基本单元电机,描述了一种定向电枢电流的直流电动机径向截面结构。定子铁芯01上有定子轭02和磁极04,定子极身上绕制励磁绕组03,四极两相磁极均布于定子铁芯01的内圆周上,按A1、B1、A2、B2分布,A、B两相磁极根据位置传感器检测到的转子位置(即电枢磁势Fa轴线位置)轮流依次供电励磁,磁极的极弧长度为0.9τ,τ是极距。采用长极弧磁极有益于扩大定、转子电磁能量转换范围,特别是磁极轮流励磁工作的电机,有益于提高效率和功率。转子铁芯05上有偶数个转子槽,只要保证电枢能够产生定向的磁势Fa即可,本发明以16个槽的实施例电机进行说明,以下以转子槽为16个进行具体说明,槽中单层嵌放第一节距Y1=2τ的长矩多匝单迭元件,如图4所示,1号多匝单迭元件首端边放于1号槽中,1号多匝单迭元件的末端边嵌入9号槽,依此类推,将8个长矩多匝单迭元件(首端边为1-8号,对应末端边为1’-8’) 嵌入转子铁芯的16个槽中,相邻各多匝单迭元件间首末端正向串联的方法组成单层单回路电枢绕组S+/S-,如图5所示。
图2和图3是实施例电机转子结构示意图,在图2中,转子铁芯05上有16个槽,每个槽中单层嵌入Y1=2τ的多匝单迭元件的1个有效边(首边或末边),因此16个转子铁芯槽06只能嵌入8个多匝单迭元件,1号槽嵌入1号多匝单迭元件的首端边,1号多匝单迭元件的末端边嵌入9号槽,依此类推,组成单层单回路实施例电机的单层单回路电枢绕组S+/S-,在转子轴08的非动力输出端安装了第一滑环11和第二滑环12,第一滑环11和第二滑环12均为滚珠式滑环或碳刷式滑环。其中,图3是滚珠式滑环结构示意图,滚珠式滑环包括绝缘环13、内圈14、外圈16以及多个滚珠15。绝缘环13套设在转子轴上,内圈14套设在绝缘环13上,外圈16套设在内圈14 上,滚珠设置于内圈14和外圈16之间,滚珠15为钢制或铜制的导电珠。内圈14、外圈16以及滚珠15均能够导电,电枢载流绕组的正极连接第一滑环11的内圈14,电枢载流绕组的负极连接第二滑环12的内圈14,滚珠式滑环可靠高、安全、寿命长且接触性电阻小。具体地,电枢载流绕组的S+ 端连接到第一滑环11的绕组连接端20上,绕组连接端20与内圈14连接, S-端连接到第二滑环12的绕组连接端20上,第一滑环11的电源连接端外接电源正极,第二滑环12的电源连接端外接电源负极,电源连接端21与外圈16连接。实施例电机外输入电能通过滚珠式滑环传送到电枢载流绕组中进行能量转换。
图4和图5是本实施例基本单元电机绕组结构图,图4是本实施例电机所采用多匝单迭元件结构图,ab为元件有效首端边,cd为元件有效末端边,两有效边的跨距为第一节距Y1,Y1=2τ,τ为极距,多匝单迭元件绕制成单层单回路电枢载流绕组。图5是定子四极、转子16槽,采用8个多匝长矩多匝单迭元件绕制的单层单回路电枢载流绕组S+/S-,在电枢载流绕组展开图中,1至16表示转子铁芯槽号,1…8、1’…8’分别表征8个多匝单迭元件首端边至对应的末端边,电枢载流绕组中正电流+Ia方向由S+流入,因此8个元件首端边电流方向为由下至上称流进电流,用
图6和图7是本实施例电机励磁绕组结构图和励磁绕组供电图。图6是两相四个磁极的绕组绕制图,各磁极绕组所用线径、匝数及绕制方向都相同,且同名端用“*”表示,首端符号a1、a2、b1、b2对应的末端分别用x1、x2、 y1、y2表示,如a1x1、a2x2、b1y1、b2y2标注,各相两极励磁绕组供电励磁后产生N、S磁极性。图7是A、B两相励磁绕组供电原理图,励磁绕组借助于H桥供电结构连接控制器,并且各相励磁绕组均采用独立的IGBT单相H桥供电励磁,其中,T1、T2、T3、T4、T5、T6、T7和T8均为功率管, T1、T2、T3、T4、T5、T6、T7和T8的基极均与控制器连接,通过控制器控制每个功率管的导通与关断,便于控制两相磁场,根据转子磁势Fa轴线位置(即转子位置)轮流励磁工作。A、B两相换相励磁的换相原则是:依据转子位置信息,遵循换相励磁的规律表,先开启换相前已停止的相,后关闭换相前已导通的相,严格避免失磁现象。
图8至图12是本实施例四极单层单回路定向电枢电流电机运行过程机理分析图,设实施电机初始状态(零位)如图8所示,期望电机转子顺时针方向旋转,在零位状态下,先停止电机供电,然后进入第一节拍。
第一节拍,在图8的基础上,此时当转子位置(或Fa轴线)在0度位置上,A相供电励磁,且A1极为N磁极性,A2位S极性,B相不励磁,磁场为零,A相励磁绕组中流过+IFa,B相励磁电流IFb=0,(控制器控制 T1、T4导通,T2、T3、T5、T6、T7、T8管都关断),电枢载流绕组S+/S-加正极性电枢电源,电枢电流为+Ia,电枢载流绕组S+/S-中的电流方向按图 5展开图中标定方向已标注在图8中,8个元件的首端边1-8号为流进电流用
第二节拍,在图9的基础上,转子上的各载流导体中的电流方向不变,但各载流导体随转子整体顺时针转了90度,Fa轴线前进了90度,此时转子位置传感器发出信息,载流导体在磁场中产生电磁力(或电磁转矩),其方向由左手定则判出,因此在第二节拍期间,B相的B1极(N极)和B2极(S 极)下所有载流导体与B相磁场共同产生顺时针方向的电磁转矩,电机转子 (即Fa轴线)继续顺时针方向旋转。当转子位置(或Fa轴线)沿顺时钟方向旋转至第二设定角度时,开启A相励磁绕组的供电(控制器控制T2、T3 导通,T1、T4截止),A相励磁绕组AX流过-IFa电流,A1极为S极性, A2极为N极性,第二设定角度为165度至175度。当转子再旋转90度后,即转子旋转至180度的位置时,如图10所示,转子位置发出信息,磁极需换相到A相励磁,停止B相工作,进入第三节拍。
第三节拍:在图10的基础上,转子上的各载流导体的电流方向不变,但各载流导体随转子整体顺时针再转了90度,Fa轴线再前进了90度,为了电机能连续稳定高效地沿n方向进行能量转换,必须进行磁极的励磁换相。在第三节拍期间,A相的A1极(S极)和A2极(N极)下所有载流导体与 A相磁场共同作用产生顺时针方向的电磁转矩,拖动转子整体沿顺时针方向以转速n旋转。当转子位置(或Fa轴线)沿顺时钟方向旋转至第三设定角度时,开启B相励磁绕组的供电(控制器控制T6、T7导通,T5、T8关断), B相励磁绕组BY流过-IFb电流,B1极为S极性,B2极为N极性,第三设定角度为255度至265度。当转子(Fa轴线)又再一次旋转90度后,如图11所示,位置传感器发出信息,磁极需换到B相励磁,停止A相工作,进入第四节拍。
第四节拍:在图11的基础上,转子上的各槽中载流导体的电流方向虽然保持不变,但此时各载流导体随转子整体又顺时针方向转了90度,Fa轴线位置相对于初始状态(0度位置)前进到了270度的位置。在第四节拍期间,B相两磁极下所有载流导体与B相磁场共同作用产生顺时针方向的电磁转矩,拖动电机转子以转速n,当转子位置(或Fa轴线)沿顺时钟方向旋转至第四设定角度时,第四设定角度为345度至355度,开启A相励磁绕组的供电(控制器控制T1、T4导通,T2、T3、T5、T6、T7、T8管都关断), A相励磁绕组AX流过-IFa电流,A1极为N极性,A2极为S极性;当转子位置(或Fa轴线)沿顺时钟方向旋转至360度时,此时转子运行到图12所示的位置,此时电枢磁势Fa轴线相对于图8而言,Fa轴线已前进了360度,图12与图8两图中,Fa轴线位置重合,转子槽中导体1-8号首端边和1’-8’末端边完全相同,电机定转子回复到8图中的初始位置,此时停止B相工作,重新进入第一节拍。电机后续运行是一个遵循从第一节拍依次到第四节拍的周期循环、周而复始的控制过程,电机将输入直流电能转换为机械能。
本发明实施例四极单层单回路基本单元电机中,两对定子极对称均匀分布在定子铁芯01内圆周上,即按A1、B1、A2、B2分布如图1所示,各磁极极弧宽度等于0.9τ(τ为极距),宽极弧磁极结构有益于扩大定转子间电磁作用范围,特别是A和B两相磁极轮流励磁进行电磁转换的工况下,有益于提高效率和功率。A、B两相励磁绕组由各自的单相IGBT H桥供电,易于实现A、B两相磁场根据转子电枢磁势Fa的轴线位置(即转子位置) 分时段轮流励磁,且与转子对应区域的载流电枢绕组产生电磁力矩。电枢绕组用第一节距Y1=2τ的长矩单迭元件绕制,每个转子槽中只嵌入单层元件边,四极基本单元电机总数为Z/2个长矩单迭元件的首末端正向串联组成单回路,即单迭长矩单层单回路电枢绕组。本发明采用滚珠式滑环将外部直流电能输入到电枢绕组,也可用碳刷式滑环代替滚珠式滑环,且滚珠式滑环比电碳刷式滑环更可靠、更安全、寿命更长,接触性电阻更小。定向电枢电流直流电动机,在运行中电枢电流方向不变,不存在因电枢电流换向带来的换向问题,本发明实施例电机,利用检测电枢磁势Fa的轴线位置,控制A、B 两相磁场轮流励磁工作和磁极的极性,保证励磁相磁极下对应的所有转子载流导体产生同方向的电磁力从而形成拖动电磁转矩(非励磁相磁极下载流导体不产生电磁力,因磁通为零),换相后的励磁磁极下对应的所有转子载流导体产生与换相前同方向的拖动电磁转矩。根据初始Fa的位置(角度大小) 克服起动时的死区,实现拖动系统的可逆运行。由于电机的电枢功率大,电流大,而励磁部分所占电机功率小,电流小,在本发明定向电枢电流直流电动机中,采用以小功率、小电流的磁场能量来控制大功率、大电流的电枢能量,这种以小博大的控制策略有益于控制和降低成本,提升性能,提高效率和功率密度,不同于永磁无刷直流电机。
实施例2,直流电机包括绕转子轴对称分布的一对励磁绕组,一对励磁绕组根据励磁策略产生指定的磁极,两个磁极分别为A1和A2,转子能够产生特定方向的磁势,转子的结构也可以与实施例1相同。一对励磁绕组通过 H桥供电。初始状态下,转子的磁势Fa的轴线位置在0度,0度位于两个磁极之间,也即A1和A2以磁势Fa轴线位置对称。电机的控制方法包括:
第一节拍,A相励磁绕组AX供电励磁,且A1极为N磁极性,A2极为S极性,A相励磁绕组AX中流过+IFa电流,电枢载流绕组S+/S-加正极性电枢电源,电枢载流绕组的电流为+Ia,电机在运行过程中,电枢载流绕组的电流+Ia方向始终保持不变;在第一节拍期间,A1极和A2极下所有电枢载流绕组与A相磁场共同作用产生顺时针方向的电磁转矩,转子顺时针方向以转速n旋转;当转子沿顺时钟方向旋转至120度至180度之间时,A相励磁绕组的AX流过-IFa电流,A1极为S极,A2极为N极;当转子沿顺时钟方向旋转至180度时,进入第二节拍;
第二节拍,保持电枢载流绕组中的电流方向不变。当转子沿顺时钟方向旋转至300度至360度之间时,A相励磁绕组的AX流过+IFa电流,A1极为N极,A2极为S极;当转子沿顺时钟方向旋转至360度时,重新进入第一节拍。
实施例3,直流电机包括绕转子轴对称分布的三对励磁绕组,三对励磁绕组根据励磁策略产生指定的磁极,六个磁极分别为A1、A2、B1、B2、C1、 C2,转子能够产生特定方向的磁势,转子的结构也可以与实施例1相同。三对励磁绕组通过单独的H桥独立供电。初始状态下,转子的磁势Fa的轴向位置在0度,0度位于两个相邻的磁极A1和B1之间,也即A1和B1以磁势Fa轴线位置对称。电机的控制方法:第一节拍,A相供电,A1为N极, A2为S极,B相和C相均不供电,转子转动到50度至170/3度之间时,开启B相的供电,此时B1为N极,B2为S极。转子转动至60度时,关闭A 相的供电,进入第二节拍。第二节拍,转子转动到120度之前设定的角度范围时,开启C相的供电,设定的角度范围根据电机的运行状况而定,目的在于避免失磁现象,此时C1为N极,C2为S极。转子转动至120度时,关闭B相的供电,进入第三节拍。第三节拍,转子转动到180度之前设定的角度范围时,开启A相的供电,此时A2为N极,A1为S极。转子转动至180 度时,关闭C相的供电,进入第四节拍。第四节拍,转子转动到240度之前设定的角度范围时,开启B相的供电,此时B2为N极,B1为S极。转子转动至240度时,关闭A相的供电,进入第四节拍。第五节拍,转子转动到 300度之前设定的角度范围时,开启C相的供电,此时C2为N极,C1为S 极。转子转动至300度时,关闭B相的供电,进入第四节拍。第六节拍,转子转动到360度之前设定的角度范围时,开启A相的供电,此时A1为N极, A2为S极。转子转动至360度时,关闭C相的供电,进入第一节拍。对于 i对励磁绕组的直流电机,其中,i为大于等于1自然数,每一对励磁绕组均采用单独的H桥进行供电。初始状态下,磁势Fa的轴向位置在0度,0度位于两个相邻的磁极之间。电机的控制方法中,包括2i个节拍,第一节拍时, A相供电,A1为N极,A2为S极,其他相均不供电。转子转动到180/i度之前设定的角度范围时,开启B相的供电,此时B1为N极,B2为S极。转子转动至180/i度时,关闭A相的供电,进入下一个节拍。第j个节拍,j 为小于等于2i且大于1的自然数,转子转动到(180j)/i度之前设定的角度范围时,提前开启相邻的下一相的供电,转子转动到(180j)/i度时,进入下一个节拍。转子转动至360度时,进入第一节拍。
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连;可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”,可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”,可以是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”,可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度低于第二特征。
在本说明书的描述中,术语“一个实施例”、“一些实施例”、“实施例”、“示例”、“具体示例”或“一些示例”等的描述,是指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
- 一种定向电枢电流的直流电动机及直流电动机控制方法
- 一种降低无刷直流电动机转矩波动的电流控制方法