一种采矿用高效防尘装置
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及采矿技术领域,具体为一种采矿用高效防尘装置。
背景技术
采矿是自地壳内和地表开采矿产资源的技术和科学。广义的采矿还包括煤和石油的开采。采矿工业是一种重要的原料工业,金属矿石是冶炼工业的主要原料,非金属矿石是重要的化工原料和建筑材料。
采矿过程中会产生大量的矿物粉尘,矿物粉尘一旦吸入后会沉淀到人体的呼吸道内和肺部,对采矿工人的身体健康造成重大的危害。因此,设计一种采矿用高效防尘装置是很有必要的。
发明内容
针对上述情况,为克服现有技术的缺陷,本发明提供一种采矿用高效防尘装置,该装置结构新颖,构思巧妙,方便履带式机器人带着吸尘器对矿洞内部的不同区域进行除尘工作,且可以自动化工作,除尘效率高,使用方便。
为实现上述目的,本发明提供如下技术方案:一种采矿用高效防尘装置,包括履带式机器人,所述履带式机器人的顶部一侧安装有电控箱,所述电控箱的顶部中心处安装有摄像头,所述电控箱的内部安装有蓄电池、GPS模块、无线通讯模块、电源开关和单片机,所述履带式机器人的顶部另一侧安装有除尘箱,所述除尘箱的顶部内壁中心处安装有竖管,所述竖管的底端固定有吸尘器,所述竖管的顶端通过连接轴承转动连接有吸尘管,所述吸尘管的顶部对称安装有吸尘罩,所述履带式机器人的顶部四周安装有若干个超声波测距传感器,所述单片机通过无线通讯模块与工控机通讯连接。
优选的,所述连接轴承的外壁套接固定有从动齿轮套,所述从动齿轮套的一侧啮合连接有主动齿轮,所述主动齿轮固定在电机的输出端,所述电机通过电机支架固定在除尘箱的顶部一侧。
优选的,所述吸尘器的底部中心处开设有出尘口,所述吸尘器的底部位于出尘口的两侧安装有滑轨,所述滑轨上滑动连接有两个相邻的滑架,所述滑架的底部安装有集尘盒,所述集尘盒的底部安装有称重单元,所述除尘箱的一侧内壁安装有伸缩气缸,所述伸缩气缸的伸缩端安装有与滑架接触的推板,所述称重单元电性连接单片机的输入端,所述单片机的输出端电性连接伸缩气缸。
优选的,所述滑轨上远离伸缩气缸的一端旋接固定有限位座。
优选的,所述除尘箱的一侧通过铰链固定有箱门。
优选的,所述箱门中部的一侧通过螺栓连接有把手。
优选的,所述电源开关的外侧设置有防尘罩。
本发明的有益效果为:
1、工控机通过无线通讯模块远程通讯控制履带式机器人运动,并辅以摄像头和超声波测距传感器实现履带式机器人的自主避障,再配合设置的吸尘器工作,通过吸尘罩进行吸尘处理,方便履带式机器人带着吸尘器对矿洞内部的不同区域进行除尘工作,且可以自动化工作,除尘效率高,使用方便;
2、通过设置的电机工作,带动主动齿轮旋转,从而带动从动齿轮套旋转,继而带动吸尘管旋转,方便对吸尘罩的位置进行调节,除尘效果好;
3、吸尘器吸收的灰尘通过出尘口进入到集尘盒的内部,当称重单元检测到集尘盒内部的灰尘重量大于单片机的预设值时,单片机控制伸缩气缸,带动推板工作,从而带动滑架在滑轨上运动,实现对集尘盒的快速更换,大大提升使用的方便性。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
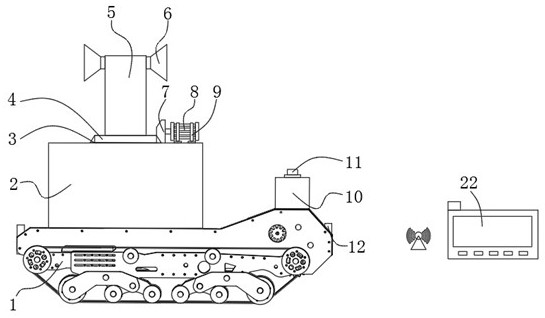
图1是本发明整体平面结构示意图;
图2是本发明除尘箱剖视平面结构示意图;
图3是本发明电控箱剖视平面结构示意图;
图中标号:1、履带式机器人;2、除尘箱;3、从动齿轮套;4、连接轴承;5、吸尘管;6、吸尘罩;7、主动齿轮;8、电机;9、电机支架;10、电控箱;11、摄像头;12、超声波测距传感器;13、吸尘器;14、伸缩气缸;15、推板;16、称重单元;17、滑架;18、集尘盒;19、出尘口;20、滑轨;21、限位座;22、工控机;23、箱门;24、竖管;25、蓄电池;26、GPS模块;27、无线通讯模块;28、电源开关;29、单片机。
具体实施方式
下面结合附图1-3对本发明的具体实施方式做进一步详细说明。
由图1-3给出,本发明提供如下技术方案:一种采矿用高效防尘装置,包括履带式机器人1,履带式机器人1的顶部一侧安装有电控箱10,电控箱10的顶部中心处安装有摄像头11,电控箱10的内部安装有蓄电池25、GPS模块26、无线通讯模块27、电源开关28和单片机29,履带式机器人1的顶部另一侧安装有除尘箱2,除尘箱2的顶部内壁中心处安装有竖管24,竖管24的底端固定有吸尘器13,竖管24的顶端通过连接轴承4转动连接有吸尘管5,吸尘管5的顶部对称安装有吸尘罩6,履带式机器人1的顶部四周安装有若干个超声波测距传感器12,单片机29通过无线通讯模块27与工控机22通讯连接,工控机22通过无线通讯模块27远程通讯控制履带式机器人1运动,并辅以摄像头11和超声波测距传感器12实现履带式机器人1的自主避障,再配合设置的吸尘器13工作,通过吸尘罩6进行吸尘处理,方便履带式机器人1带着吸尘器13对矿洞内部的不同区域进行除尘工作,且可以自动化工作,除尘效率高,使用方便。
连接轴承4的外壁套接固定有从动齿轮套3,从动齿轮套3的一侧啮合连接有主动齿轮7,主动齿轮7固定在电机8的输出端,电机8通过电机支架9固定在除尘箱2的顶部一侧,通过设置的电机8工作,带动主动齿轮7旋转,从而带动从动齿轮套3旋转,继而带动吸尘管5旋转,方便对吸尘罩6的位置进行调节,除尘效果好。
吸尘器13的底部中心处开设有出尘口19,吸尘器13的底部位于出尘口19的两侧安装有滑轨20,滑轨20上滑动连接有两个相邻的滑架17,滑架17的底部安装有集尘盒18,集尘盒18的底部安装有称重单元16,除尘箱2的一侧内壁安装有伸缩气缸14,伸缩气缸14的伸缩端安装有与滑架17接触的推板15,称重单元16电性连接单片机29的输入端,单片机29的输出端电性连接伸缩气缸14,吸尘器13吸收的灰尘通过出尘口19进入到集尘盒18的内部,当称重单元16检测到集尘盒18内部的灰尘重量大于单片机29的预设值时,单片机29控制伸缩气缸14,带动推板15工作,从而带动滑架17在滑轨20上运动,实现对集尘盒18的快速更换,大大提升使用的方便性。
滑轨20上远离伸缩气缸14的一端旋接固定有限位座21,通过拆卸下限位座21,方便取下滑架17,实现对集尘盒18内部灰尘的清理。
除尘箱2的一侧通过铰链固定有箱门23,方便除尘箱2的打开和关闭。
箱门23中部的一侧通过螺栓连接有把手,便于箱门23的开关。
电源开关28的外侧设置有防尘罩,便与保护电源开关28。
本发明使用时,工控机22通过无线通讯模块27远程通讯控制履带式机器人1运动,并辅以摄像头11和超声波测距传感器12实现履带式机器人1的自主避障,再配合设置的吸尘器13工作,通过吸尘罩6进行吸尘处理,方便履带式机器人1带着吸尘器13对矿洞内部的不同区域进行除尘工作,且可以自动化工作,除尘效率高,使用方便;
通过设置的电机8工作,带动主动齿轮7旋转,从而带动从动齿轮套3旋转,继而带动吸尘管5旋转,方便对吸尘罩6的位置进行调节,除尘效果好;
吸尘器13吸收的灰尘通过出尘口19进入到集尘盒18的内部,当称重单元16检测到集尘盒18内部的灰尘重量大于单片机29的预设值时,单片机29控制伸缩气缸14,带动推板15工作,从而带动滑架17在滑轨20上运动,实现对集尘盒18的快速更换,大大提升使用的方便性。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种矿用高效防尘喷雾装置
- 一种矿井采矿用高效防尘装置