电子助力器的双冗余位置检测的无刷电机控制方法及系统
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及无刷电机控制领域,特别是涉及一种用于电子助力器的双冗余位置检测的无刷电机控制方法及系统。
背景技术
传统的真空助力器产生的助力是通过发动机带动产生真空度实现的,在电动汽车中,电动机取代了发动机,助力系统仍采用真空助力器的话,需额外增加真空泵和储气罐来产生真空,其体积较大,不利于空间布置。因此,伴随着电动汽车的发展,电子助力器应运而生,电子助力器中的动力装置是电机,因有刷电机的具有磨损大、损耗大、发热大、效率低、输出功率小的缺点,目前主要采用的动力装置是无刷电机。无刷电机没有电刷,在电机运转时避免产生电火花,这样就减小了对电气设备的干扰;无刷电机不使用电刷,降低了电机运转时产生的摩擦力,增加了电机的使用寿命,同时减小了运转时产生的噪音,整个电机运转时比较顺畅。
由于无刷电机没有电刷,电流的方向由控制器来控制,为精确控制电机,控制系统一般较为复杂,且电机的控制需要位置反馈来闭环,通常的位置检测分为有位置传感器检测和无位置传感器检测,其中有位置传感器检测,常用霍尔传感器或编码器作为位置传感器,但位置传感器存在失效情况,一旦失效电机将无法控制;无位置传感器检测,常用反电势法,当无位置传感器失效时,也将无法控制电机。
发明内容
本发明提供一种电子助力器的双冗余位置检测的无刷电机控制方法及系统,以解决因位置传感器失效带来的无刷电机无法控制的问题。
本发明采取的技术方案是:一种电子助力器的双冗余位置检测的无刷电机控制系统,行程传感器经行程转换电路与主控制器电连接,主控制器经电机调速电路、电机驱动电路与无刷电机电连接,无刷电机分别经位置传感器采集电路和反电势采集电路和主控制器电连接。
所述无刷电机还与电压检测电路电连接,所述电压检测电路用于检测无刷电机电压,在过压时向主控制器发出信号。
所述行程传感器用于采集脚踏板传递的制动行程。
所述行程转换电路将相应行程转换成行程电压信号,输出给主控制器。
所述主控制器接收行程转换电路输出的行程电压信号,换算成驱动无刷电机所需电流大小,调整PWM波的占空比,并将PWM波输出到电机调速电路;根据位置传感器采集电路采集位置传感器的电压计算出无刷电机位置,并根据位置信号计算出无刷电机转速,从而实现无刷电机的闭环控制;接收反电势采集电路采集无刷电机的反电势信号,当检测到反电势过大时,主控制器减小输出PWM波的占空比,从而降低无刷电机的转速,实现电机的闭环控制;当接收到电压检测电路检测的无刷电机过压信号时,主控制器停止输出PWM波,无刷电机停止工作,达到保护无刷电机的目的。
所述电机调速电路接收主控制器发送的调节电机转速的PWM波,并将其转换成电机驱动信号输出到电机驱动电路。
所述电机驱动电路将电机转动所需的驱动信号输出到无刷电机,控制无刷电机转动或停止。
所述位置传感器采集电路采集位置传感器的电压信号,并输出至主控制器,该位置传感器采用霍尔传感器;
所述反电势采集电路采集无刷电机的反电势信号,并输出至主控制器。
还包括电压变换电路,该电压变换电路采用+12V供电,将+12V电压变换成系统工作所需的+5V和+3.3V电压。
一种用于电子助力器的双冗余位置检测的无刷电机控制方法,包括下列步骤:
第1步:系统上电初始化完毕后,检测行程传感器是否输出行程信号,若是则进入第2步,若否则在第1步继续检测;
第2步:根据行程电压信号,计算驱动无刷电机所需电流大小,调节PWM波占空比并输出,进入第3步;
第3步:是否检测到位置传感器输出的位置信号,若是则进入第4-1步,若否、则检测是否采集到反电势信号,若是则进入第4-2步,若否则在第3步继续检测;
第4-1步:根据位置信号,计算无刷电机转速,进入第5步;
第4-2步:根据电势信号,计算无刷电机转速,进入第5步;
第5步;根据计算出的无刷电机转速,反馈到第2步中的PWM波占空比,从而实现电机闭环控制。
本发明还包括电压检测电路检测无刷电机电压,在过压时向主控制器发出信号,此时控制器停止输出PWM波,无刷电机停止工作,达到保护无刷电机的目的。
本发明的有益效果是结构新颖,包括依次连接的行程传感器、行程转换电路、主控制器、电机调速电路和电机驱动电路,通过行程传感器采集脚踏制动行程,主控制器根据行程信号来驱动无刷电机,通过位置传感器采集电路和反电势采集电路双冗余进行无刷电机位置检测,主控制器根据无刷电机位置计算电机的转速,从而实现电子助力器中无刷电机的精确闭环控制,基于霍尔传感器和反电势法双冗余设计的位置检测方法,能在无位置传感器的情况下,仍可检测电机位置,可提高系统的可靠性,降低因位置传感器失效带来的风险。
附图说明
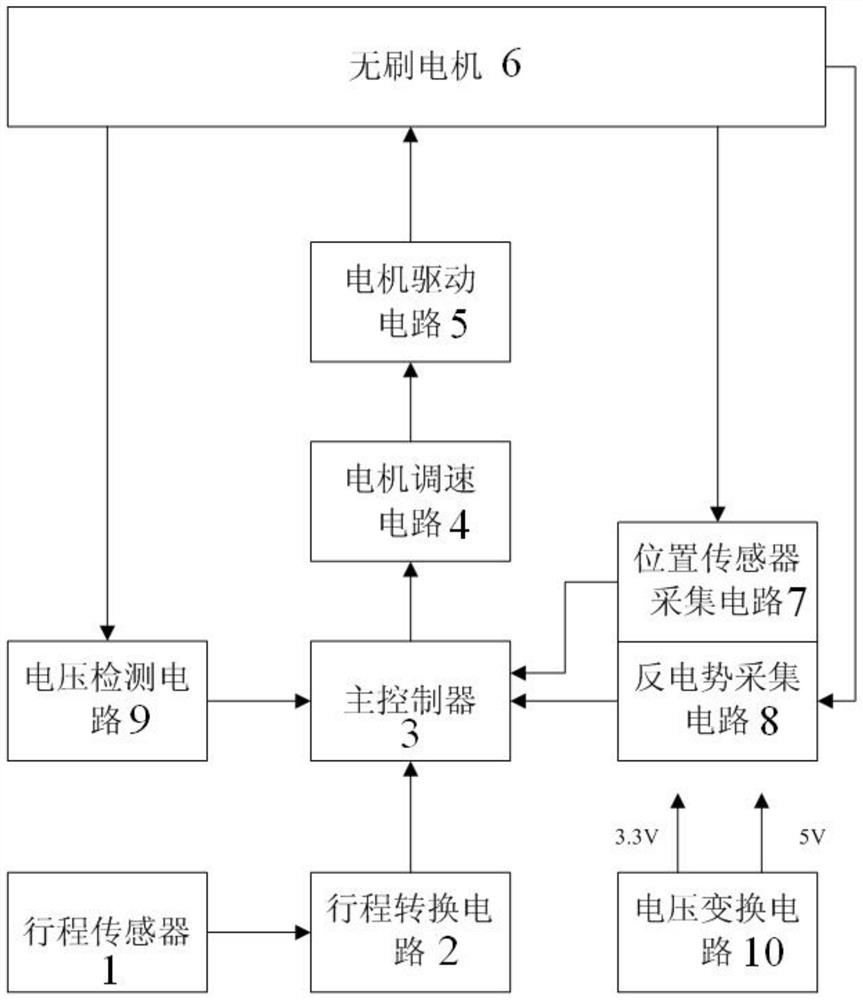
图1是本发明系统的原理框图;
图2是本发明方法的流程图。
具体实施方式
如图1所示,一种电子助力器的双冗余位置检测的无刷电机控制系统,行程传感器1经行程转换电路2与主控制器3电连接,主控制器3经电机调速电路4、电机驱动电路5与无刷电机6电连接,无刷电机6分别经位置传感器采集电路7和反电势采集电路8和主控制器3电连接;
所述无刷电机还与电压检测电路9电连接,所述电压检测电路用于检测无刷电机电压,在过压时向主控制器发出信号;
所述行程传感器用于采集脚踏板传递的制动行程;
所述行程转换电路将相应行程转换成行程电压信号,输出给主控制器;
所述主控制器接收行程转换电路输出的行程电压信号,换算成驱动无刷电机所需电流大小,调整PWM波的占空比,并将PWM波输出到电机调速电路;根据位置传感器采集电路采集位置传感器的电压计算出无刷电机位置,并根据位置信号计算出无刷电机转速,从而实现无刷电机的闭环控制;接收反电势采集电路采集无刷电机的反电势信号,当检测到反电势过大时,主控制器减小输出PWM波的占空比,从而降低无刷电机的转速,实现电机的闭环控制;当接收到电压检测电路检测的无刷电机过压信号时,主控制器停止输出PWM波,无刷电机停止工作,达到保护无刷电机的目的;
所述电机调速电路接收主控制器发送的调节电机转速的PWM波,并将其转换成电机驱动信号输出到电机驱动电路;
所述电机驱动电路将电机转动所需的驱动信号输出到无刷电机,控制无刷电机转动或停止;
所述位置传感器采集电路用于采集位置传感器的电压信号,并输出至主控制器,该位置传感器采用霍尔传感器;
所述反电势采集电路采集无刷电机的反电势信号,并输出至主控制器;
还包括电压变换电路10,该电压变换电路采用+12V供电,将+12V电压变换成系统工作所需的+5V和+3.3V电压。
如图2所示,一种用于电子助力器的双冗余位置检测的无刷电机控制方法,包括下列步骤:
第1步:系统上电初始化完毕后,检测行程传感器是否输出行程信号,若是则进入第2步,若否则在第1步继续检测;
第2步:根据行程电压信号,计算驱动无刷电机所需电流大小,调节PWM波占空比并输出,进入第3步;
第3步:是否检测到位置传感器输出的位置信号,若是则进入第4-1步,若否、则检测是否采集到反电势信号,若是则进入第4-2步,若否则在第3步继续检测;
第4-1步:根据位置信号,计算无刷电机转速,进入第5步;
第4-2步:根据电势信号,计算无刷电机转速,进入第5步;
第5步;根据计算出的无刷电机转速,反馈到第2步中的PWM波占空比,从而实现电机闭环控制;
还包括电压检测电路检测无刷电机电压,在过压时向主控制器发出信号,此时控制器停止输出PWM波,无刷电机停止工作,达到保护无刷电机的目的。
- 电子助力器的双冗余位置检测的无刷电机控制方法及系统
- 一种基于智能化电子助力器的无刷电机控制方法