智能分类垃圾箱及分类识别方法
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及垃圾分类的技术领域,尤其涉及一种智能分类垃圾箱及分类识别方法。
背景技术
每个人每天都在或多或少地制造各种各样的生活垃圾。现阶段的工业技术水平能够在垃圾处理产业链的末端对大部分的生活垃圾做进一步的价值提取,以实现环境保护与可持续发展策略。其中,不同的生活垃圾对应有不同的处理方法,因此,需要对垃圾进行分拣与分类。
加强前端即制造者端的垃圾分类投放,可以极大缓解末端进行再分拣和分类的压力,也降低了垃圾处理成本。一直以来,前端的垃圾分类投放都是通过宣传手段来给人们灌输垃圾分类的意识;尽管通过宣传取得了一定的效果,但是在各地所取得的整体成绩依旧不理想。2019年7月1日,《上海市生活垃圾管理条例》正式实施,其作为我国第一个强制要求垃圾分类投放的地方性法规,标志着垃圾分类投放强制要求时代的开启。
由于生活垃圾的多样性与复杂性,且年龄层次、教育背景和消化信息能力等存在巨大差异,因而,经常出现投放垃圾时存在无法界定垃圾所属的类别、进而投放错误的现象。
发明内容
本发明的目的在于提供一种智能分类垃圾箱及分类识别方法,面向商场、学校、综合体等以单个垃圾(非袋装垃圾)投放为主的场景,以解决现有技术中垃圾分类时难以界定、进而投放错误的问题。
根据本发明的第一方面,提供一种智能分类垃圾箱,所述智能分类垃圾箱包括:
箱体,所述箱体具有用于投放垃圾的投放口和若干个用于收容不同类别垃圾的收容仓;
分类识别平台模块,其可转动的置于所述箱体内,用于接收经所述投放口投进的垃圾并进行分类识别;
驱动模块,其用于驱动所述分类识别平台模块转动以使垃圾掉落于对应的所述收容仓;
控制模块,其置于所述箱体内,并与所述分类识别平台模块、所述驱动模块电连接,所述控制模块接收所述分类识别平台模块的识别信息,并根据所述识别信息控制所述驱动模块驱动所述分类识别平台模块以对应所述识别信息的预设角度转动。
作为本发明的一个实施例,所述分类识别平台模块包括用于承置未经识别的垃圾的水分测定台,所述水分测定台用于识别其上垃圾是否类属于湿垃圾,且与所述控制模块电连接。
作为本发明的一个实施例,所述分类识别平台模块还包括与所述控制模块电连接的金属传感器,所述金属传感器用于识别所述水分测定台上的垃圾是否类属于金属类垃圾。
作为本发明的一个实施例,所述分类识别平台模块还包括与所述控制模块电连接的图像识别组件。
作为本发明的一个实施例,所述图像识别组件用于识别所述水分测定台上的垃圾是否类属于瓶状类垃圾。
作为本发明的一个实施例,所述水分测定台具有第一承置状态、第一倾斜状态以及第二倾斜状态;
所述驱动模块包括与所述控制模块电连接的第一驱动件,所述第一驱动件用于驱动所述水分测定台在所述第一承置状态、所述第一倾斜状态以及所述第二倾斜状态之间切换。
作为本发明的一个实施例,处于所述第一承置状态的所述水分测定台沿第一方向倾斜以切换至所述第一倾斜状态,处于所述第一承置状态的所述水分测定台沿第二方向倾斜以切换至所述第二倾斜状态,且所述第一方向与所述第二方向相反。
作为本发明的一个实施例,所述分类识别平台模块还包括具有缺口的围台,所述水分测定台可转动的嵌设于所述缺口中;
所述围台具有第二承置状态、第三倾斜状态以及第四倾斜状态;
所述驱动模块还包括与所述控制模块电连接的第二驱动件,所述第二驱动件用于驱动所述围台在所述第二承置状态、所述第三倾斜状态以及所述第四倾斜状态之间切换;
当所述水分测定台处于所述第一倾斜状态、且所述围台处于所述第三倾斜状态时,所述水分测定台与所述围台共面;当所述水分测定台处于所述第二倾斜状态、且所述围台处于所述第四倾斜状态时,所述水分测定台与所述围台共面。
作为本发明的一个实施例,若干个所述收容仓具体为依次排列的第一收容仓、第二收容仓、第三收容仓以及第四收容仓;
当所述水分测定台处于所述第一倾斜状态、且所述围台处于所述第三倾斜状态时,垃圾掉落于所述第一收容仓;
当所述水分测定台处于所述第二倾斜状态、且所述围台处于所述第四倾斜状态时,垃圾掉落于所述第四收容仓;
当所述水分测定台处于所述第一倾斜状态、且所述围台处于所述第二承置状态时,垃圾掉落于所述第二收容仓;
当所述水分测定台处于所述第二倾斜状态、且所述围台处于所述第二承置状态时,垃圾掉落于所述第三收容仓。
作为本发明的一个实施例,当所述水分测定台处于所述第一承置状态、且所述围台处于所述第二承置状态时,所述水分测定台与所述围台共面。
作为本发明的一个实施例,所述箱体包括具有收容空间的壳体和若干个置于所述收容空间内的筒壳,且所述筒壳形成所述收容仓。
作为本发明的一个实施例,所述壳体包括主壳体和与所述主壳体形成所述收容空间的门板,在竖直方向上,所述门板高于所述筒壳。
作为本发明的一个实施例,还包括置于所述箱体内且与所述控制模块电连接的喷淋装置,所述喷淋装置用于定时对所述收容仓内的垃圾进行除臭消毒。
作为本发明的一个实施例,所述喷淋装置为若干个,若干个所述喷淋装置对应若干个所述收容仓依次排列在所述门板的内壁上。
第二方面,本发明提供了一种分类识别方法,应用于如第一方面所述的智能分类垃圾箱,其特征在于,包括:
分类识别平台模块识别所接收的垃圾的类别,并将识别信息发送至控制模块;
所述控制模块控制驱动模块驱动所述分类识别平台模块以对应所述识别信息的预设角度转动。
作为本发明的一个实施例,所述分类识别平台模块识别所接收的垃圾的类别包括:
所述分类识别平台模块识别所接收的垃圾是否类属于金属类垃圾。
作为本发明的一个实施例,所述分类识别平台模块识别所接收的垃圾是否类属于金属类垃圾包括:
所述分类识别平台模块识别出所接收的垃圾类属于金属类垃圾,所述控制模块控制所述驱动模块驱动所述分类识别平台模块以对应识别信息为金属类垃圾的预设角度转动;
所述分类识别平台模块识别出所接收的垃圾不类属于金属类垃圾,则继续识别。
作为本发明的一个实施例,所述分类识别平台模块识别所接收的垃圾的类别还包括:
在所述分类识别平台模块识别出所接收的垃圾不类属于金属类垃圾之后,所述分类识别平台模块识别所接收的垃圾是否类属于瓶状类垃圾。
作为本发明的一个实施例,所述分类识别平台模块识别所接收的垃圾是否类属于瓶状类垃圾包括:
所述分类识别平台模块识别出所接收的垃圾类属于瓶状类垃圾,所述控制模块控制所述驱动模块驱动所述分类识别平台模块以对应识别信息为瓶状类垃圾的预设角度转动;
所述分类识别平台模块识别出所接收的垃圾不类属于瓶状类垃圾,则继续识别。
作为本发明的一个实施例,所述分类识别平台模块识别所接收的垃圾的类别还包括:
在所述分类识别平台模块识别出所接收的垃圾不类属于瓶状类垃圾,所述分类识别平台模块识所接收的垃圾是否为湿垃圾。
作为本发明的一个实施例,所述分类识别平台模块识别所接收的垃圾是否为湿垃圾包括:
所述分类识别平台模块识别出所接收的垃圾类属于湿垃圾,所述控制模块控制所述驱动模块驱动所述分类识别平台模块以对应识别信息为湿垃圾的预设角度转动;
所述分类识别平台模块识别出若所接收的垃圾类属其他垃圾,所述控制模块控制所述驱动模块驱动所述分类识别平台模块以对应识别信息为其他垃圾的预设角度转动。
实施本发明实施例,将具有如下有益效果:
在本发明中,通过投放口投放的垃圾会先掉落到分类识别平台模块,接着,分类识别平台模块对垃圾进行分类识别,并将识别信息发送至控制模块,其中,识别信息可以表现为识别出干垃圾、湿垃圾等;控制模块再根据识别信息控制驱动模块驱动分类识别平台模块以对应识别信息的预设角度转动,从而使得垃圾掉落于对应的收容仓中,具体地,不同的识别信息对应不同的预设角度,不同的预设角度对应不同的收容仓,因此,本技术方案中的垃圾箱可以对投放的垃圾进行分类识别并投放进对应类别的收容仓,实现垃圾分类收集,从而解决了现有技术中垃圾分类时难以界定、进而投放错误的技术问题。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明一实施例所述的智能分类垃圾箱闭合时的结构示意图;
图2为本发明一实施例所述的智能分类垃圾箱打开时的结构示意图;
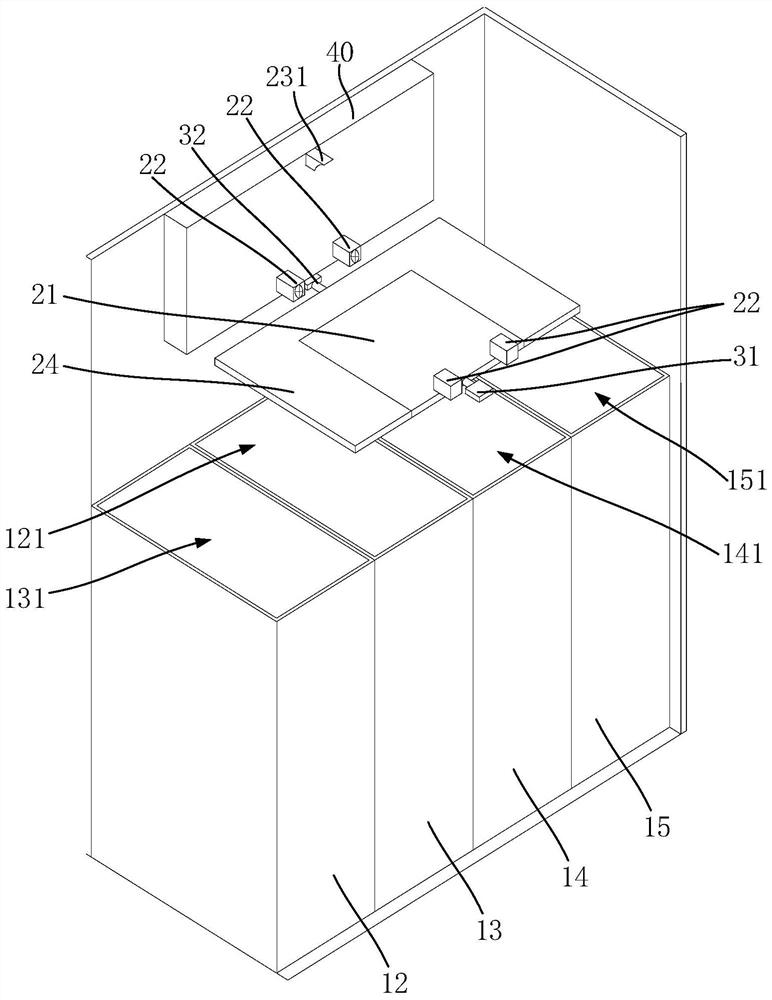
图3为本发明一实施例所述的智能分类垃圾箱的部分示意图;
图4为本发明一实施例所述的智能分类垃圾箱的部分示意图;
图5为本发明一实施例所述的智能分类垃圾箱的部分示意图;
图6为本发明一实施例所述的智能分类垃圾箱的结构框图;
图7为本发明一实施例所述的分别识别方法的一流程示意图;
图8为本发明一实施例所述的分别识别方法的一流程示意图;
图9为本发明一实施例所述的分别识别方法的一流程示意图;
图10为本发明一实施例所述的分别识别方法的一流程示意图;
图11为本发明一实施例所述的分别识别方法的一流程示意图。
其中:100、智能分类垃圾箱;10、箱体;11、壳体;11a、投放口;111、主壳体;112、门板;12、第一筒壳;121、第一收容仓;13、第二筒壳;131、第二收容仓;14、第三筒壳;141、第三收容仓;15、第四筒壳;151、第四收容仓;20、分类识别平台模块;21、水分测定台;22、金属传感器;23、图像识别组件;231、红外摄像头;232、图像信息处理模块;24、围台;241、缺口;30、驱动模块;31、第一驱动件;32、第二驱动件;40、控制模块;50、喷淋装置;60、锁定装置;70、对射传感器。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以容许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参照图1-图6,本发明提供了一种智能分类垃圾箱100,包括箱体10、分类识别平台模块20、驱动模块30以及控制模块40;箱体10具有用于投放垃圾的投放口11a和若干个用于收容不同类别垃圾的收容仓;分类识别平台模块20可转动的置于箱体10内,用于接收经投放口11a投进的垃圾并进行分类识别;驱动模块30用于驱动分类识别平台模块20转动以使垃圾掉落于对应的收容仓;控制模块40置于箱体10内,并与分类识别平台模块20、驱动模块30电连接,控制模块40接收分类识别平台模块20的识别信息,并根据识别信息控制驱动模块30驱动分类识别平台模块20以对应识别信息的预设角度转动。
在本发明中,通过投放口11a投放的垃圾会先掉落到分类识别平台模块20,接着,分类识别平台模块20对垃圾进行分类识别,并将识别信息发送至控制模块40,其中,识别信息可以表现为识别出干垃圾、湿垃圾等;控制模块40再根据识别信息控制驱动模块30驱动分类识别平台模块20以对应识别信息的预设角度转动,从而使得垃圾掉落于对应的收容仓中,具体地,不同的识别信息对应不同的预设角度,不同的预设角度对应不同的收容仓,因此,本技术方案中的垃圾箱可以对投放的垃圾进行分类识别并投放进对应类别的收容仓,实现垃圾分类收集,从而解决了现有技术中垃圾分类时难以界定、进而投放错误的技术问题。
参见图3-图6,在一种实施例中,分类识别平台模块20包括用于承置未经识别的垃圾的水分测定台21,水分测定台21用于识别其上垃圾是否类属于湿垃圾,且与控制模块40电连接。当垃圾经投放口11a掉落到水分测定台21上后,水分测定台21对垃圾进行是否含水分检测,若检测到垃圾含有水分,则识别信息显示为湿垃圾,控制模块40则控制驱动模块30驱动分类识别平台以对应识别信息为湿垃圾的预设角度转动,使垃圾掉落到用于收容湿垃圾的收容仓中;若检测的垃圾不含有水分,则该垃圾为干垃圾,控制模块40则控制驱动模块30驱动分类识别平台以对应识别信息为干垃圾的预设角度转动,使垃圾掉落到用于收容干垃圾的收容仓中。
在一些具体的实施例中,水分测定台21与投放口11a正对,即投放口11a位于水分测定台21的正上方。
在一种实施例中,分类识别平台模块20还包括与控制模块40电连接的金属传感器22,金属传感器22用于识别水分测定台21上的垃圾是否类属于金属类垃圾。在本实施例中,干垃圾进一步包括金属类垃圾和其他垃圾,当金属传感器22检测到水分测定台21上的垃圾类属于金属类垃圾时,控制模块40则控制驱动模块30驱动分类识别平台模块20以对应识别信息为金属类垃圾的预设角度转动,使垃圾掉落到用于收容金属类垃圾的收容仓中;当金属传感器22检测到水分测定台21上的垃圾不类属于金属类垃圾时,即为其他垃圾,控制模块40则控制驱动模块30驱动分类识别平台以对应识别信息为其他垃圾的预设角度转动,使垃圾掉落到用于收容其他垃圾的收容仓中。
需要说明的是,本实施例中,在对垃圾进行识别时,先通过金属传感器22识别水分测定台21上的垃圾是否为金属类垃圾,先将金属类垃圾区分出去以提高回收利用价值,防止因水分测定台21对金属类垃圾发生电压反应而误将金属类垃圾识别为湿垃圾;在金属传感器22识别显示该垃圾不属于金属类垃圾时,再通过水分测定台21对其上垃圾进行识别,进而可以识别出湿垃圾和其他垃圾。
在一些具体的实施例中,金属传感器22设置在箱体10的内壁上;金属传感器22为四个,四个金属传感器22分为两组,分别设置在箱体10相对的两个内壁上。
其中,金属传感器22可采用金属接近开关。
在一种实施例中,分类识别平台模块20还包括与控制模块40电连接的图像识别组件23;且图像识别组件23用于识别水分测定台21上的垃圾是否类属于瓶状类垃圾。在本实施例中,干垃圾进一步包括金属类垃圾、瓶状垃圾以及其他垃圾,具体的,先通过金属传感器22识别该垃圾是否为金属类垃圾,若否,则通过图像识别组件23识别该垃圾是否为瓶状垃圾,若是,控制模块40则控制驱动模块30驱动分类识别平台以对应识别信息为瓶状垃圾的预设角度转动,使垃圾掉落到用于收容瓶状垃圾的收容仓中;若否,则通过水分测定台21进一步识别,从而识别出湿垃圾和其他垃圾;
在进行湿垃圾识别前先识别瓶状垃圾,防止瓶状垃圾因附着有水珠而被误识别湿垃圾,以提高垃圾分类识别的准确性以及回收利用价值。其中,湿垃圾一般为瓜果皮以及一些常见的厨余类垃圾。
其中,图像识别组件23包括红外摄像头231和图像信息处理模块232,红外摄像头231与图像处理模块电连接,图像信息处理模块232与控制模块40电连接,红外摄像头231拍摄预水分测定台21上的垃圾,并将图像传输到图像信息处理模块232,图像信息处理模块232将图像转化为数字信号,并判断该垃圾是否属于瓶状垃圾,再把结果传输至控制模块40。
在一些具体的实施例中,红外摄像头231设置在箱体10的内壁上,且位于水分测定台21的上方,以对垃圾进行拍摄。
参见4和图5,水分测定台21具有第一承置状态、第一倾斜状态以及第二倾斜状态;驱动模块30包括与控制模块40电连接的第一驱动件31,第一驱动件31用于驱动水分测定台21在第一承置状态、第一倾斜状态以及第二倾斜状态之间切换。在本实施例中,驱动模块30驱动水分测定台21处于第一承置状态以接收经投放口11a投放的垃圾,控制模块40还可以根据识别信息控制第一驱动件31驱动水分测定台21进行转动,如,当水分测定台21转到到第一倾斜状态时,垃圾掉落到与第一倾斜状态对应的收容仓中,当水分测定台21转动到第二倾斜状态时,垃圾掉落到与第二倾斜状态对应的收容仓中;因此,在本实施例中,水分测定台21不仅具有识别作用,还可以倾斜以将垃圾导进对应的收容仓中。
在一些具体的实施例中,处于第一承置状态的水分测定台21沿第一方向倾斜以切换至第一倾斜状态,处于第一承置状态的水分测定台21沿第二方向倾斜以切换至第二倾斜状态,且第一方向与第二方向相反。
在一些具体的实施例中,第一驱动件31固定在箱体10内。
参见4和图5,在一种实施例中,分类识别平台模块20还包括具有缺口241的围台24,水分测定台21可转动的嵌设于缺口241中。且水分测定台21与围台24转动连接,具体地,水分测定台21远离第一驱动件31的一端通过转轴与围台24转动连接,以使得水分测定台21稳定转动。
围台24具有第二承置状态、第三倾斜状态以及第四倾斜状态;驱动模块30还包括与控制模块40电连接的第二驱动件32,第二驱动件32用于驱动围台24在第二承置状态、第三倾斜状态以及第四倾斜状态之间切换。其中,第二驱动件32固定在箱体10内。
其中,当水分测定台21处于第一倾斜状态、且围台24处于第三倾斜状态时,水分测定台21与围台24共面,此时可将垃圾导进与第三倾斜状态对应的收容仓内;当水分测定台21处于第二倾斜状态、且围台24处于第四倾斜状态时,水分测定台21与围台24共面,此时,可将垃圾导进与第四倾斜状态对应的收容仓。即通过单独驱动水分测定台21可将垃圾导进两种不同类别的收容仓,通过同时驱动水分测定台21和围台24可将垃圾导进另外两部不同类别的收容仓,因此,通过水分测定台21与围台24的配合可将垃圾导进四种不同类别的收容仓中。
具体地,参见图3,若干个收容仓具体为依次排列的第一收容仓121、第二收容仓131、第三收容仓141以及第四收容仓151;当水分测定台21处于第一倾斜状态、且围台24处于第三倾斜状态时,垃圾掉落于第一收容仓121;当水分测定台21处于第二倾斜状态、且围台24处于第四倾斜状态时,垃圾掉落于第四收容仓151;当水分测定台21处于第一倾斜状态、且围台24处于第二承置状态时,垃圾掉落于第二收容仓131;当水分测定台21处于第二倾斜状态、且围台24处于第二承置状态时,垃圾掉落于第三收容仓141。
在一些具体的实施例中,第一收容仓121用于收容金属类垃圾,第二收容仓131用于收容瓶状垃圾,第三收容仓141用于收容湿垃圾,第四收容仓151用于收容其他垃圾。因此,当金属传感器22识别出该垃圾为金属类垃圾时,第一驱动件31驱动水分测定台21转动预设转动以切换至第一倾斜状态,第二驱动件32驱动围台24转动以切换至第三倾斜状态,从而将垃圾导进第一收容仓121;当图像识别组件23识别出该垃圾为瓶状垃圾时,第一驱动件31驱动水分测定台21转动以切换至第一倾斜状态,第二驱动件32驱动围台24转动以切换至第二承置状态,从而将垃圾导进第二收容仓131;当水分测定台21识别出该垃圾为湿垃圾时,第一驱动件31驱动水分测定台21转动以切换第二倾斜状态,第二驱动件32驱动围台24转动以切换至第二承置状态,从而将垃圾导进第三收容仓141;当水分测定台21识别出该垃圾不属于湿垃圾时,即为其他垃圾,第一驱动件31驱动水分测定台21转动以切换第二倾斜状态,第二驱动件32驱动围台24转动以切换至第四倾斜状态,以将垃圾导进第四收容仓151。
需要说明的是,第一收容仓121、第二收容仓131、第三收容仓141以及第四收容仓151收容的垃圾类别还可以进行调整,只需要控制模块40中调整识别信息与预设角度的对应关系即可。
在一些具体的实施中,当水分测定台21处于第一承置状态、且围台24处于第二承置状态时,水分测定台21与围台24共面。因此,当无垃圾投放时,水分测定台21处于第一承置状态,围台24处于第二承置状态;当需要将垃圾导进第一收容仓121时,控制模块40可控制水分测定台21、围台24转动同样的角度,以分别切换至第一倾斜状态、第三倾斜状态;当需要将垃圾导进第四收容仓151时,控制模块40可控制水分测定台21、围台24转动同样的角度,以分别切换至第二倾斜状态、第四倾斜状态。
在一种实施例中,结合图2和图3,箱体10包括具有收容空间的壳体11和若干个置于收容空间内的筒壳,且筒壳形成收容仓。
在一些具体的实施例中,筒壳具体为第一筒壳12、第二筒壳13、第三筒壳14以及第四筒壳15,第一筒壳12形成第一收容仓121,第二筒壳13形成第二收容仓131,第三筒壳14形成第三收容仓141、第四筒壳15形成第四收容仓151。其中,第一筒壳12、第二筒壳13、第三筒壳14以及第四筒壳15可以为一体式结构,也可以为分体式结构。
在一种实施例中,壳体11包括主壳体111和与主壳体111形成收容空间的门板112,在竖直方向上,门板112高于筒壳,以方便取出筒壳对收容仓进行清理并归置。
在一些具体的实施例中,门板112为两个,两个门板112与主壳体111转动连接,两个门板112可作相对远离运动以打开箱体10、也可作相对靠近运动以封合箱体10。
在一种实施例中,参见图1,该垃圾箱还包括用于锁定门板112的锁定装置60,其中,锁定装置60可设置为密码锁。
参见图2,在一种实施例中,该垃圾箱还包括置于箱体10内喷淋装置50,该喷淋装置50用于对收容仓内的垃圾进行除臭消毒;且该喷淋装置50与控制模块40电连接,通过控制模块40控制喷淋装置50定时对收容仓内的垃圾喷洒消毒液,以实现除臭处理和消毒处理。
在一些具体的实施例中,喷淋装置50为若干个,若干个喷淋装置50与若干个收容仓一一对应;具体的,喷淋装置50为四个。
在一种实施例中,若干个喷淋装置50依次设置在门板112,当打开门板112时,可方便的对喷淋装置50进行消毒液的补充。需要说明的是,喷淋装置50高于筒壳,以将消毒液喷洒进收容仓内。
参见图6,在一种实施例中,该垃圾箱还包括若干个分别与控制模块40电连接的对射传感器70,若干个对射传感器70分别用于感应若干个收容仓是否处于满仓状态。具体地,当对射传感器70被遮挡时,表示收容仓已满。
此外,箱体10上设置有与控制模块40电连接的指示件,当对射传感器70检测到收容仓已满仓时,控制模块40控制指示件发出满仓指示,提醒工作人员进行和更换筒壳。
在一些具体的实施例中,指示件可以体现为指示灯、指示播放器或者指示屏幕等。
参见图7,针对上述智能分类垃圾箱100,本发明还提供了一种分类识别方法,包括:
101、分类识别平台模块20识别所接收的垃圾的类别,并将识别信息发送至控制模块40;
102、控制模块40控制驱动模块30驱动分类识别平台模块20以对应识别信息的预设角度转动。
本实施例中,先通过分类识别平台模块20接收并对垃圾进行垃圾分类识别,同时,分类识别平台模块20将识别信息发送至控制模块40,控制模块40再根据该识别信息向驱动模块30发出控制指令,该控制指令使得驱动模块30驱动分类识别平台以预设角度转动,且预设角度与识别信息对应,即根据不同识别信息驱动分类识别平台模块20转动不同的角度,使得垃圾掉落不同的收容仓,从而实现垃圾分类投放。
在一种实施例中,参见图8,分类识别平台模块20识别所接收的垃圾的类别包括:
201、分类识别平台模块20识别所接收的垃圾是否类属于金属类垃圾。
在本实施例中,分类识别平台模块20包括金属传感器22,通过金属传感器22对垃圾进行识别,以判断是否属于金属类垃圾。
具体地,参见图9,分类识别平台模块20识别所接收的垃圾是否类属于金属类垃圾包括:
301、分类识别平台模块20识别出所接收的垃圾类属于金属类垃圾,控制模块40控制驱动模块30驱动分类识别平台模块20以对应识别信息为金属类垃圾的预设角度转动;
302、分类识别平台模块20识别出所接收的垃圾不类属于金属类垃圾,则继续识别。
在一种实施例中,参见图8,分类识别平台模块20识别所接收的垃圾的类别还包括,在分类识别平台模块20识别出所接收的垃圾不类属于金属类垃圾之后,
202、分类识别平台模块20识别所接收的垃圾是否类属于瓶状类垃圾。
在本实施例中,分类识别平台模块20还包括图像识别组件23,通过图像识别组件23对垃圾进行识别,以判断是否属于瓶状垃圾,其中,瓶状垃圾可以为塑料或玻璃材料。
具体地,参见图10,分类识别平台模块20识别所接收的垃圾是否类属于瓶状类垃圾包括:
401、分类识别平台模块20识别出所接收的垃圾类属于瓶状类垃圾,控制模块40控制驱动模块30驱动分类识别平台模块20以对应识别信息为瓶状类垃圾的预设角度转动;
402、分类识别平台模块20识别出所接收的垃圾不类属于瓶状类垃圾,则继续识别。
在一种实施例中,参见图8,分类识别平台模块20识别所接收的垃圾的类别还包括:在分类识别平台模块20识别出所接收的垃圾不类属于瓶状类垃圾,
203、分类识别平台模块20识所接收的垃圾是否为湿垃圾。
在本实施例中,分类识别平台模块20还包括水分测定台21,通过水分测定台21对垃圾进行识别,以判断是否属于湿垃圾。
具体地,参见图11,分类识别平台模块20识别所接收的垃圾是否为湿垃圾包括:
501、分类识别平台模块20识别出所接收的垃圾类属于湿垃圾,控制模块40控制驱动模块30驱动分类识别平台模块20以对应识别信息为湿垃圾的预设角度转动;
502、分类识别平台模块20识别出若所接收的垃圾类属其他垃圾,控制模块40控制驱动模块30驱动分类识别平台模块20以对应识别信息为其他垃圾的预设角度转动。
本发明提供的分类识别方法顺序是金属类垃圾→瓶状垃圾→湿垃圾→其他垃圾,从而将湿垃圾与干垃圾分离,进而又将干垃圾划分为金属类垃圾、瓶状垃圾以及其他垃圾,通过先分离金属类垃圾,以防止因水分测定台21对金属的电压反应而导致湿垃圾和干垃圾划分不准确;在分离金属类垃圾后,再分离瓶状垃圾,瓶状垃圾一般为塑料和玻璃,以防止因瓶外附着有水珠而被识别为湿垃圾,因此在识别湿垃圾之前先识别瓶状垃圾以提高垃圾分类的准确性;最后对湿垃圾进行识别,可识别出湿垃圾和其他垃圾。
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种基于物联网的智能分类垃圾箱系统及智能分类垃圾箱
- 智能分类垃圾箱及分类识别方法