一种设有AI骨折复位机械臂的C臂机及其使用方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及医疗设备,具体是一种设有AI骨折复位机械臂的C臂机及其使用方法。
背景技术
骨折是骨外科的常见病症,骨折的恢复首先需要恢复正常的解剖结构,这是骨折恢复最好的条件,并且可以促进骨折愈合,减少并发症的发生非常关键的。现在临床对骨折复位依靠的是X片下的外固定支架下的微创复位或切开扣得内置钢板复位。
目前骨折复位存在以下缺点:骨折闭合或切开复位时,骨科医生依据骨折部位C臂机X光拍片判断骨折面关系,进而复位。复位时,医生根据个人经验做复位动作,复位动作完成后,再次对骨折部位拍片验证复位效果,最后做骨折块固定操作。由于复位动作完成后,骨折块尚没固定,仅仅依靠人工固定,固定效果不稳定,在骨折块固定操作时,很容易发生骨折块位移,导致原本已复位的骨折块再次错位,而必须重新对骨折块复位。甚至多次重复骨折块复位操作,导致患者接受多次X光拍片,浪费大量无效的手术时间。临床急需一种能对骨折块稳妥固定,在骨折块复位操作及骨折块固定操作时,严格避免骨折块再次错位,确保骨折块复位及固定操作一次性完成,避免反复重复的骨折块复位操作,减少手术中X光拍片次数,节省手术时间的一种复位仪器。
发明内容
为解决上述现有技术的缺陷,本发明提供一种设有AI骨折复位机械臂的C臂机及其使用方法,本发明利用C臂机能够大大缩短手术的时间,提高了断骨块复位的准确性,成本低,方便使用,便捷性,安全性可靠。
为实现上述技术目的,本发明采用如下技术方案:一种设有AI骨折复位机械臂的C臂机,包括C臂机本体、控制主机,所述C臂机本体的C形臂的两侧分别设有至少一个机械臂,所述机械臂的游离端部设有连接部,所述控制主机能够控制所述机械臂移动使所述连接部在任意方向运动;
还包括若干个定位杆,所述若干个定位杆的一端能够进入断骨块内与该断骨块临时固定,所述若干个定位杆的另一端能够与所述连接部临时固定连接或者分离,当所述定位杆与所述连接部固定连接时,所述控制主机能够控制任意一个所述机械臂在任意方向运动,并能使所述定位杆在任意方向运动使各断骨块复位;
所述C臂机本体设有显示器,能够储存及显示所述C臂机本体对骨折面拍摄的X片影像。
进一步地,所述控制主机内置AI智能学习系统,能对断骨块复位时各断块的影像资料及各所述机械臂的运动轨迹进行储存及分析。
进一步地,所述机械臂在远离所述C臂机本体的C形臂方向的一侧设有支撑架,所述支撑架能托举支撑远离骨折面一侧的肢体,所述支撑架拆卸式安装。
进一步地,还包括X光屏蔽板,所述控制主机设置在所述X光屏蔽板的后方。
进一步地,所述机械臂内设有动力系统及空间感应系统,能驱动所述机械臂的各部件相对运动,并确定机械臂各部件相对空间位置。
进一步地,所述X光屏蔽板的后方设有医生操作工位,在医生操作工位上能对控制主机进行操作,并能控制及观察显示器。
进一步地,每个所述机械臂至少能适配一个所述连接部,每个所述连接部(4)至少能装配一个所述定位杆。
一种设有AI骨折复位机械臂的C臂机的使用方法,所述方法包括以下步骤:
以靠近患者躯干中心的最大的断骨块为第一断骨块,相邻第一断骨块的断骨块为第二断骨块,以此类推,以最远离患者躯体的断骨块为第N断骨块;
将第一断骨块及第二断骨块之间的骨折面放置在所述C臂机本体的拍摄位置;
对第一断骨块及第二断骨块钻入并固定至少一个所述定位杆,将对应所述连接部固定连接到相应的所述定位杆上,使第一断骨块及第二断骨块至少对应一个所述机械臂;
将第一断骨块及第二断骨块的所述定位杆所对应的连接部分别与对应的所述机械臂固定连接,通过所述C臂机本体对第一断骨块及第二断骨块之间的骨折面拍X片并通过所述显示器输出;
在所述显示器输出的第一断骨块及第二断骨块的骨折面X片下,通过所述控制主机控制所述机械臂调整第一断骨块位置适当并保持不动;通过所述控制主机控制第二断骨块对应的所述机械臂向远离第一断骨块的方向运动距离a,使得第二断骨块与第一断骨块之间产生适当距离b;然后通过所述控制主机控制第二断骨块对应的所述机械臂进行适配运动,使得第二断骨块与第一断骨块的骨折面对应,并逐渐向第一断骨块的骨折面靠近,最后正确复位;
将第二断骨块及第三断骨块的骨折面放置在所述C臂机本体的拍摄位置;使用相同的操作方法,使第二断骨块及第三断骨块的骨折面正确复位;
然后通过所述控制主机依次控制下一断骨块对应的所述机械臂与上一断骨块依次正确复位;直至所有相邻的断骨块均正确复位,完成所有断骨块位置复位;
使用若干外固定杆将各所述定位杆夹持固定,将各所述连接部与所述定位杆分离,完成各断骨块复位外固定;
或在各断骨块没有连接定位杆的另外一侧切开软组织暴露各骨折块,置入钢板及螺钉,实施骨折内固定;最后缝合软组织,将各所述连接部与所述定位杆分离,完成各断骨块复位内固定。
进一步地,在待复位的最长距离长度大于或等于4cm的断骨块上钻入并固定至少两个所述定位杆,在最长距离长度小于4cm的断骨块上钻入并固定一个所述定位杆。
进一步地,还包括:当所述机械臂数量小于断骨块数量N时,先将主要的大骨块复位固定后,再脱离所有所述机械臂,将邻近没复位固定的已复位断骨块视为第一断骨块,再进行正确复位。
综上所述,本发明取得了以下技术效果:
1、本发明骨折复位能做到一次性对位,减少骨折块在软组织内反复拉扯移动,避免二次伤害;
2、一人即可完成操作手术,避免医务人员辐射照射,减少患者辐射照射;
3、缩短手术时间,降低手术风险,减少手术费用;
4、确保手术间无菌环境,降低创面感染几率。
附图说明
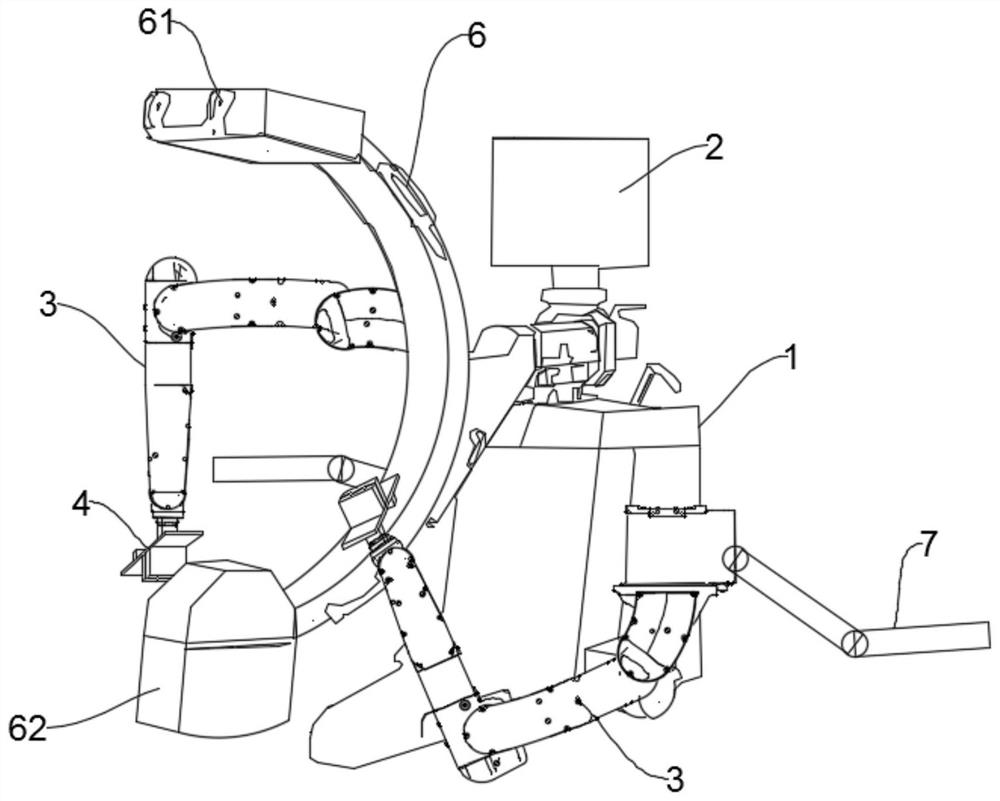
图1是本发明实施例提供的一种设有AI骨折复位机械臂的C臂机示意图;
图2是复位断骨块时的俯视示意图;
图3是定位杆示意图;
图4是连接部示意图;
图5是机械臂示意图;
图6是断骨块与连接部连接时在C臂机上的示意图;
图7是复位过程一个状态示意图;
图8是复位过程又一个状态示意图;
图9是复位过程最终状态示意图;
图10是N个断骨块骨折复位示意图。
具体实施方式
以下结合附图对本发明作进一步详细说明。
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
实施例:
如图1所示,一种设有AI骨折复位机械臂的C臂机,包括C臂机本体6和控制主机1,C臂机本体6的C形臂的两侧分别设有至少一个机械臂3,机械臂3的游离端部设有连接部4,控制主机1能够控制至少两个机械臂3移动使连接部4在任意方向运动,控制连接部4运动的目的是将骨折的断骨块运动复位。
如图1所示,本实施例中在C臂机本体6的两侧各自设置一个机械臂3,用于通过连接部4来控制断骨块的运动和复位,其中,还包括若干个定位杆5,其中,若干个定位杆5的一端能够进入断骨块内与该断骨块临时固定,另一端能够与连接部4连接或者分离,当定位杆5与连接部4连接时,控制主机1能够控制任意一个机械臂3在任意方向运动,并能使定位杆5在任意方向运动使各断骨块复位。
C臂机本体6的一端为发射端61,另一端为接收端62,发射端61发射的射线能够照射在断骨块的骨折面上,然后显示在显示器2上。
C臂机本体6设有显示器2,能够储存及显示C臂机本体6对骨折骨折面拍摄的X片影像。
本发明中,控制主机1内置AI智能学习系统,能对断骨块复位时各断块的影像资料及各机械臂的运动轨迹进行储存及分析,能够在使用前人为或者自动学习复位的方式以及复位的距离数据等,增加智能性。
如图1所示,机械臂3在远离C臂机本体6的C形臂方向的一侧设有支撑架7,能托举支撑远离骨折面一侧的肢体,支撑架7能临时安装及拆卸,其中,支撑架7为可旋转的方式,目的是便于调节高低或者前后位置以适应支撑躯干,防止患者的躯干悬空造成不便。
还包括X光屏蔽板,X光屏蔽板包括含铅玻璃;控制主机1设置在X光屏蔽板的后方。X光屏蔽板的后方设有医生操作工位,医生操作工位设置在X光屏蔽板后方,医生坐在医生操作工位时,能对控制主机1进行操作,并能控制及观察显示器2。其中,在C臂机本体6与操作工位之间设置一个X光屏蔽板(未图示),用于阻隔射线,避免对医护人员造成不适,另外,X光屏蔽板的后侧为操作工位,操作工位分为至少三个,左侧操作工位对应左侧的机械臂3,中间操作工位对应C臂机的控制,右侧操作工位对应右侧的机械臂3,在每个操作工位上放置椅子以及台面,便于医护人员操作。
如图2所示为复位操作过程的俯视示意图,其中,此时的状态是C臂机竖直着拍摄,因此在俯视图上仅能看到发射端61,图中,将断骨块放置在拍摄位置,两侧的机械臂3分别通过一个连接部4和相应的定位杆5固定连接断骨块。
本发明中,定位杆5为杆状,一是能够进入断骨块内,二是能够与机械臂3进行连接,当然,做成钉子状也是可以的,只需钉子状的能够与机械臂3方便连接即可。
本实施例中,定位杆5为杆状,如图3所示,定位杆5包括依次连接的一螺钉尖51、一螺钉杆52、一固定臂53,其中,螺钉尖51用于进入患者断骨块内,螺钉杆52上可以设置外螺纹方便固定牢靠,该螺钉杆52的形状为整体是圆柱形,便于打进断骨块内,固定臂53用于与连接部4连接,固定臂53的形状为非圆柱形,非圆柱状是为了与连接部4更好的固定连接,防止圆柱形的形状与连接部4之间打滑或者晃动。具体的,固定臂53的形状可以采用椭圆柱形、正三角形等等形状,固定臂53作为手柄与连接部4进行连接,提高连接的便利性。另外,固定臂53的尺寸可以与螺钉杆52相同或者不相同,根据实际需要制定即可。
为了方便的与定位杆5进行连接,本发明中将连接部4设置为夹持状,能够自动开合夹持定位杆5。本实施例中,如图4所示,连接部4包括一底座41,底座41上滑动设有两个夹板42,其中,底座41上可以设置滑轨组件便于夹板42的运动,夹板42连接有驱动件43,驱动件43采用滑台气缸或者其他形式的驱动件,驱动件43能够驱动两个夹板42夹紧或者松开,以使得两个夹板42夹紧定位杆5或者松开定位杆5。另外,在夹持定位杆5时,由于只要实现两个夹板42之间的开合即可,因此,驱动件43可以是仅驱动其中一个夹板另一个夹板固定的方式,也可以是同时驱动两个夹板的方式。
为了与固定臂53之间的更好的连接固定,本实施例中在夹板42的相对侧面上开设至少一个夹槽44,该夹槽44与固定臂53的形状相匹配,防止夹板与固定臂之间的不稳定或者晃动的情况出现。
当然,连接部4也可以采用夹子式,利用人工方式手动夹紧固定臂,本实施例中是采用驱动件的方式进行自动的夹紧。
连接部4上设置有唯一标记,机械臂3上设有识别标识的第一识别装置,当定位杆5进入到断骨块时,将定位杆5的位置与对应的连接部4相互对接,使得定位杆5、连接部4、机械臂3之间能够准确的定位。当然,在打好定位杆5之后,直接将连接部4固定在定位杆5上,后续再进行连接部4与机械臂3之间的连接。当机械臂3连接连接部4时,机械臂3能够自动读取该连接部4是第几个,以方便断骨块之间的顺序确定。
连接部4的规格各不相同,但夹槽44之间的位置关系是相同,便于与定位杆5的连接。
另外,每一断骨块上钉进的两个定位杆5之间的距离相等,方便统一与连接部4连接。
在打钉时,由于骨折位置可能会断成几块,有的断骨块长,有的断骨块短,长断骨块需要打上至少两个定位杆5进行定位和复位,短的断骨块打一个就可以,当然,如果是很小的断骨块,无法打钉子的话那就不用打钉子,本发明针对可以打钉的断骨块而言,最优方案是每块断骨块上打进两个定位杆,提高定位的准确性,如果骨折的断骨块较短只能打一个定位杆的话,那就打一个定位杆。另外,本实施例中给出一个合适的距离:在待复位的最长距离长度大于4cm的断骨块上钻入并固定两个的定位杆5,在最长距离长度小于4cm的断骨块上钻入并固定一个定位杆5。
同时,在打定位杆时,保持多个定位杆处于断骨块的同一侧,便于连接部4的夹持固定。
进一步地,定位杆5的长度设置长一些,由于骨折位置可能在很多地方,例如腿骨、盆骨、手臂骨等等,定位杆5进入断骨块的距离以及软组织外部的距离一般是不相同的,因此,定位杆5长度较长一些能够方便连接部4的夹持与固定,即使外漏的长度不一,也能够同时被夹持住。
另外,在控制主机1控制机械臂3运动时,可以采用多种方式,本实施例中给出其中一种方式:如图5所示,机械臂3采用机械臂,机械臂3至少包括基座31、第一杆部32、第二杆部33和第三杆部34;基座31和第一杆部32之间、第一杆部32和第二杆部33之间、第二杆部33和第三杆部34之间分别设有第一旋转轴35、第二旋转轴36和第三旋转轴37,其中,第一旋转轴35、第二旋转轴36和第三旋转轴37之间互相垂直,实现xyz三个轴上的运动。
在控制机械臂3的三个轴旋转时,由于是控制两根相邻的断骨块之间的贴合度,该贴合度很难由人眼观察到,因此本实施例中采用控制主机控制的方式。另外,在三个轴旋转时,也可以采用人工按按钮的方式。
进一步地,机械臂3与连接部4之间的连接方式采用可拆卸式连接。
同时,机械臂3内设有动力系统及空间感应系统,能驱动机械臂3的各部件相对运动,并确定机械臂3各部件相对空间位置。另外,定位杆5上设有唯一标识,机械臂3上设有识别标识的第二识别装置,标识可以采用条形码、二维码等任意能够识别的标记,第二识别装置可是一扫码枪或者其他能够读取表示的装置。例如,在每一个定位杆5上贴上二维码,二维码与定位杆5之间唯一对应,当定位杆5与断骨块固定后,机械臂3与定位杆5连接后,机械臂3上的第二识别装置自动读取该二维码并记录该定位杆5的编号,使得同一手术中的所有定位杆5均对应着不同的编号。例如,本场手术中使用8个定位杆5,机械臂3读取二维码后,控制主机1将8个定位杆5进行编号,从第一断骨块开始编号1、2、3...8,编号有助于医护知道该机械臂3对应着第几块断骨,以及有助于机械臂3对该定位杆5进行相应的动作。
本发明中,每个机械臂3至少能适配一个连接部4,每个连接部4至少能装配一个定位杆5,使得本装置能够灵活使用,适应多种场合,以及适应于断骨块较多的手术。
如图6所示,图中虚线为射线,将两个断骨块之间的骨折面放置在射线区域内进行实时拍摄,当然,此图中省略了患者的躯干、支撑躯干的支撑架7、驱动连接部4运动的机械臂3以及控制主机1和显示器2等。
当然,机械臂3可以设置为两侧都会运动实现复位,也可以将其中一侧(靠近躯干的一侧)的机械臂3保持不动,只驱动另一侧(远离躯干的一侧)的机械臂3。
在另一个实施例中,一种设有AI骨折复位机械臂的C臂机的使用方法,包括以下步骤:
以靠近患者躯干中心的最大的断骨块为第一断骨块,相邻第一断骨块的断骨块为第二断骨块,以此类推,以最远离患者躯体的断骨块为第N断骨块;
将第一断骨块及第二断骨块之间的骨折面放置在C臂机本体6的拍摄位置;
对第一断骨块及第二断骨块钻入并固定至少一个定位杆5,将对应连接部4固定连接到相应的定位杆5上,使第一断骨块及第二断骨块至少对应一个机械臂3;
将第一断骨块及第二断骨块的定位杆5所对应的连接部4分别与对应的机械臂3固定连接,通过C臂机本体6对第一断骨块及第二断骨块之间的骨折面拍X片并通过显示器2输出;
在显示器2输出的第一断骨块及第二断骨块的骨折面X片下,通过控制主机1控制机械臂3调整第一断骨块位置适当并保持不动;通过控制主机1控制第二断骨块对应的机械臂3向远离第一断骨块的方向运动距离a,使得第二断骨块与第一断骨块之间产生适当距离b;然后通过控制主机1控制第二断骨块对应的机械臂3进行适配运动,使得第二断骨块与第一断骨块的骨折面对应,并逐渐向第一断骨块的骨折面靠近,最后正确复位;
将第二断骨块及第三断骨块的骨折面放置在C臂机本体6的拍摄位置;使用相同的操作方法,使第二断骨块及第三断骨块的骨折面正确复位;
然后通过控制主机1依次控制下一断骨块对应的机械臂3与上一断骨块依次正确复位;直至所有相邻的断骨块均正确复位,完成所有断骨块位置复位;
使用若干外固定杆6将各定位杆5夹持固定,将各连接部4与定位杆5分离,完成各断骨块复位外固定;
或在各断骨块没有连接定位杆5的另外一侧切开软组织暴露各骨折块,置入钢板及螺钉,实施骨折内固定;最后缝合软组织,将各连接部4与定位杆5分离,完成各断骨块复位内固定。
上述方法中,在待复位的最长距离长度大于或等于4cm的断骨块上钻入并固定至少两个定位杆5,在最长距离长度小于4cm的断骨块上钻入并固定一个定位杆5。
该方法还包括:当机械臂3数量小于断骨块数量N时,先将主要的大骨块复位固定后,再脱离所有机械臂3,将邻近没复位固定的已复位断骨块视为第一断骨块,再进行正确复位。
同时,距离a为0.5-3cm,距离b为0.5-1.5cm。
例如,如图7-9所示的两个断骨块为例,图中省略C臂机本体6,直接显示断骨块之间的复位关系:
以大腿的两个断骨块骨折为例,第1块断骨块为靠近躯体的,第2块为靠近小腿的:第1块断骨块为较长一点的断骨块,在该断骨块上的同一侧打上两个定位杆5,使得定位杆5的螺钉尖51以及螺钉杆52的一部分进入断骨块内,第2块断骨块为短一些的断骨块,但是也能够打上两个定位杆5,因此在第2块断骨块上也打上两个定位杆5;另外,在打进2个定位杆5时,由于定位杆5的固定臂53不是圆形的,因此,此时按照连接部4上夹槽44的方向来打钉子,然后将连接部4夹持在2个定位杆5上:启动驱动件43将两个夹板42分离一段距离,将机械臂3靠近定位杆5,将夹板42的夹槽44对准两个固定臂53,启动驱动件43使得两个夹板42夹紧固定臂53,同理,将第2块断骨块上的定位杆以同样的方式夹紧在另一个连接部4上;
将患者的骨折面位置放置在射线下,将机械臂3对应的连接在连接部4,机械臂3自动读取连接部4上的标记识别该连接部4是第几个断骨块对应的,然后读取定位杆5上的标识识别这个第几个定位杆5,本实施例中只有2个断骨块,对应2个机械臂3和4个定位杆5,在数量较少时无需识别。
进行复位:如图7所示,控制主机1控制第一个机械臂3保持不动,从而使得第1块断骨块保持不动,然后控制主机1驱动第二个机械臂3运动1.5cm,运动的方向为:第2块断骨块的长度方向,使得第2块断骨块与第1块断骨块之间存在1.5cm的间隙;
如图8所示,第2块断骨块的骨折面与第1块断骨块的骨折面相对应,然后控制主机1控制机械臂靠近第1块断骨块一段距离,使得两个骨折面相互贴合,贴合后如图9所示;
复位完成后,将连接部4与定位杆5分离,将定位杆5锁紧即可。
如果是开放式手术,在复位完成后,在骨折位置切开一个切口,向内部放入一个钢板,进行定位,拔出定位杆5即可。
当定位杆5是2个及以上时,机械臂3识别连接部4的编号,当定位杆5是1个时,机械臂3直接识别定位杆5的编号即可。
以上仅是对本发明的较佳实施方式而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
- 一种设有AI骨折复位机械臂的C臂机及其使用方法
- 一种设有驱蚊功能的AI故事机