粉粒物料储料桶料盖、物料储存罐及物料搬运机器人
文献发布时间:2023-06-19 12:27:31
技术领域
本发明属于物料搬运技术领域,具体涉及粉粒物料储料桶料盖、物料储存罐及物料搬运机器人。
背景技术
目前我国现有的粉粒物料运输,通常采用人工打开或关闭密封料盖,操作人员需要确保罐体没有压缩气体的状态下才能利用手柄将料盖打开,向罐体内装入物料,当物料装载完成后,需要操作人员再次对料盖进行操作,将进料口堵住,避免在运输过程中罐体内的物料发生泄漏,由于粉粒物料通常利用罐体内外的压力差来将罐体内的物料进行卸载,而料盖利用人工拧紧的方式锁紧在罐体上,在运输的过程中道路颠簸或其他因素的影响,容易导致料盖松动,出现泄漏问题。
发明内容
发明目的:提供粉粒物料储料桶料盖、物料储存罐及物料搬运机器人,解决了现有技术存在的上述问题。
技术方案:粉粒物料储料桶料盖,包括:
支撑框,设置在支撑框内纵向截面为T型的进料口,设置在所述进料口侧面且与所述进料口一体成型的放置块,安装在支撑框内的控制器;
密封组件,包括转动连接在所述放置块上的第一转动板,转动连接在所述放置块上且与第一转动板转动连接的第二转动板;通过第一转动板与第二转动板相互转动卡接在进料口上对进料口进行密封封堵;
伸缩组件,包括转动连接在所述支撑框上的第一往复气缸,转动连接在所述支撑框上且与所述第一往复气缸相镜像的第二往复气缸;所述第一往复气缸的另一端转动连接在所述第一转动板上,所述第二往复气缸的另一端转动连接在所述第二转动板上,通过所述控制器控制第一往复气缸和第二往复气缸进行往复伸缩。
通过控制器控制第一往复气缸和第二往复气缸使第一转动板与第二转动板进行转动,通过第一转动板与第二转动板相互配合来对进料口进行封堵或打开,有效避免在运输的过程中由于震动导致料盖松动出现泄漏。
优选的,还包括设置在所述进料口上表面的若干第一密封块,分别安装在所述第一转动板和第二转动板下表面上的若干第二密封块,所述第一密封块与所述第二密封块之间相互交错且表面接触连接,加强第一转动板第二转动板与进料口之间的密封性,降低泄漏的可能性。
优选的,还包括镶嵌在所述第一转动板内的压力传感器,所述压力传感器与所述控制器电连接,并通过控制器接受压力传感器信号来控制第一往复气缸和第二往复气缸伸缩,控制进料口打开关闭,避免出现罐体内压力过大状态下打开进料口发生危险。
优选的,还包括设置在所述第一转动板与第二转动板接触的侧壁上的凹槽,所述凹槽与所述第一转动板上表面之间的夹角为锐角,以及固定连接在第二转动板上的弹性密封条,第一转动板与第二转动板表面接触时,弹性密封条卡接在所述凹槽内,第一转动板与第二转动板闭合对进料口进行密封后,通过弹性密封条卡在凹槽内来使第一转动板与第二转动板接触面做进一步密封,避免出现泄漏。
优选的,还包括设置在所述进料口上端侧壁上的环形凸起,设置在所述第一转动板与第二转动板内侧壁上的弧形凹槽;通过环形凸起卡接在弧形凹槽内进一步进行密封
优选的,所述第一密封块与所述第二密封块均采用弹性材质制成,加强对进料口的密封。
进一步提供一种粉粒物料储存罐,包括上述粉粒物料储料桶料盖。
优选的,包括罐体,以及设置在所述罐体末端下方的出料口,通过罐体来储存粉粒物料,便于对粉粒物料进行搬运,并通过出料口将粉粒物料排出罐体。
还提供一种粉粒物料搬运机器人,包括爬行机构,所述罐体安装在所述爬行机构上,通过爬行机构的移动来实现对粉粒物料进行搬运,即使遇到非正常的道路,也能顺利的通过,实现对粉粒物料的运输,且减少外界来带的震动。
有益效果:本发明涉及粉粒物料储料桶料盖、物料储存罐及物料搬运机器人,通过第一往复气缸和第二往复气缸带动第一转动板和第二转动板来实现对进料口的封堵和打开,无需人工来对料盖打开或关闭进行操作,提高工作效率,也降低了安全隐患,同时物料搬运的过程中,也避免了在外界震动的情况下导致料盖松动出现泄漏的情况。
附图说明
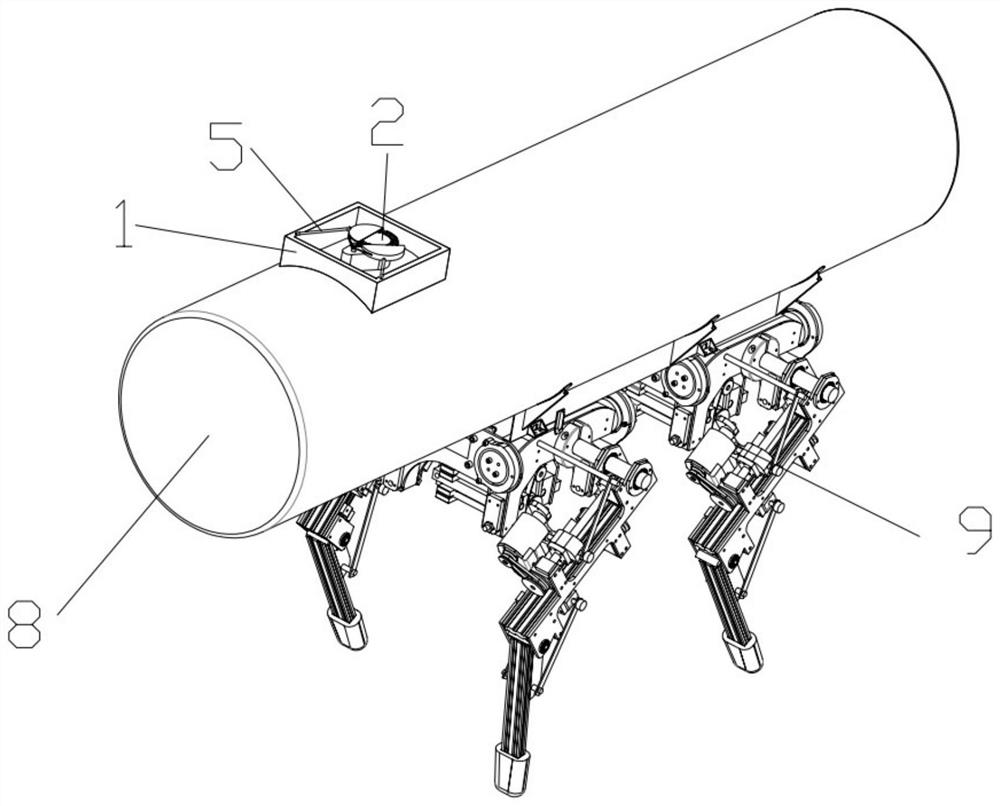
图1为本发明的搬运机器人结构示意图;
图2为本发明的料盖结构示意图;
图3为本发明的料盖剖面图;
图4为图3A处放大示意图;
图5为本发明的料盖结构示意图。
图中附图标记为:支撑框1、进料口2、放置块3、密封组件4、伸缩组件5、第一密封块6、环形凸起7、罐体8、爬行机构9、第一往复气缸51、第二往复气缸52、第一盖板41、第二盖板42、第一转动块43、第二转动块44、工型凹槽45、第二密封块46、凹槽47、弹性密封条48、弧形凹槽49。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
在实际的应用中,申请人发现:目前我国现有的粉粒物料运输,通常采用人工打开或关闭密封料盖,操作人员需要确保罐体没有压缩气体的状态下才能利用手柄将料盖打开,向罐体内装入物料,当物料装载完成后,需要操作人员再次对料盖进行操作,将进料口堵住,避免在运输过程中罐体内的物料发生泄漏,由于粉粒物料通常利用罐体内外的压力差来将罐体内的物料进行卸载,而料盖利用人工拧紧的方式锁紧在罐体上,在运输的过程中道路颠簸或其他因素的影响,容易导致料盖松动,出现泄漏问题,针对这些问题,所以发明了粉粒物料储料桶料盖、物料储存罐及物料搬运机器人,能够有效的解决上述问题。
如图1至图5所示,粉粒物料储料桶料盖,以下简称“该装置”。该装置包括支撑框1、密封组件4和伸缩组件5三个部分。
所述支撑框1内设置有纵向截面为T型的进料口2,所述进料口2上卡接有密封组件4,所述密封组件4上转动连接伸缩组件5,所述进料口2侧面设置与所述进料口2一体成型的放置块3,所述密封组件4转动连接在所述放置块3上,支撑框1内安装有控制器,通过所述控制器控制伸缩组件5来带动密封组件4在放置块3上进行转动,来控制进料口2的打开和封闭。所述密封组件4包括转动连接在所述放置块3上的第一转动板,所述第一转动板包括第一盖板41和第一转动块43,所述放置块3上转动连接第二转动板,所述第二转动板包括第二盖板42和第二转动块44,所述第一盖板41与所述第二盖板42形状相同且相互镜像,所述第一盖板41内设有工型凹槽45,所述第一转动板通过第一转动块43转动连接在放置块3上,所述第二转动板通过第二转动块44转动连接在所述放置块3上,所述第一转动块43与所述第二转动块44交叉重叠,通过第一转动板与第二转动板相互转动形成一个圆柱型,将进料口2卡接在第一盖板41与第二盖板42的工型凹槽45内,对进料口2进行密封封堵。所述进料口2上表面设置若干第一密封块6,所述第一盖板41和第二盖板42下表面上分别安装若干第二密封块46,所述第一密封块6与所述第二密封块46之间相互交错且表面接触连接,所述第一密封块6与所述第二密封块46均采用弹性材质制成,增强第一密封块6与第二密封块46之间的密封效果。所述伸缩组件5包括转动连接在所述支撑框1上的第一往复气缸51,所述支撑框1上转动连接有第二往复气缸52,所述第一往复气缸51与所述第二往复气缸52镜像对称,所述第一往复气缸51的另一端转动连接在所述第一转动板上,所述第二往复气缸52的另一端转动连接在所述第二转动板上,通过所述控制器控制第一往复气缸51和第二往复气缸52进行往复伸缩。通过控制器控制第一往复气缸51和第二往复气缸52使第一转动板与第二转动板进行转动,通过第一转动板与第二转动板相互配合来对进料口2进行封堵或打开,有效避免在运输的过程中由于震动导致料盖松动出现泄漏。
为了避免罐体8内与外界存在压力差的情况下打开第一转动板和第二转动板,在所述第一转动板内镶嵌压力传感器,所述压力传感器与所述控制器电连接,并通过控制器接受压力传感器信号来控制第一往复气缸51和第二往复气缸52伸缩,控制进料口2打开关闭,避免了罐体8内与罐体8外压力不同对进料口2打开发生危险。
由于进料口2是通过第一盖板41与第二盖板42相互转动配合,来将进料口2封堵密封,但是由于第一盖板41与第二盖板42表面接触密封可能会存在缝隙,在运输的过程中粉粒物料则会通过缝隙处泄漏出来,为了进一步增强第一盖板41和第二盖板42对进料口2进行密封,所述第一盖板41与第二盖板42接触的侧壁上设置凹槽47,以及固定连接在第二盖板42上的弹性密封条48,第一盖板41与第二盖板42表面接触时,弹性密封条48卡接在所述凹槽47内,避免第一盖板41与第二盖板42接触面之间存在缝隙导致泄漏。为了使弹性密封条48与凹槽47之间密封的更紧密,所述凹槽47设计为倾斜的凹槽47,所述凹槽47与所述第一盖板41上表面之间的夹角为锐角,当第一盖板41与第二盖板42相互接触密封时,弹性密封条48延倾斜的凹槽47进行滑动,使弹性密封条48弯折卡接在所述凹槽47内来进一步密封。
在长期使用的过程中,第一密封块6与第二密封块46之间由于长期使用磨损,可能会发生老化导致存在缝隙,为了进一步增强第一盖板41和第二盖板42对进料口2进行密封,所述进料口2上端侧壁上设置环形凸起7,所述第一盖板41与第二盖板42内侧壁上设置弧形凹槽49,通过环形凸起7卡接在弧形凹槽49内进一步进行密封。
一种粉粒物料储存罐,包括罐体8,所述罐体8末端下方设置有出料口,所述罐体8上安装有上述粉粒物料储料桶料盖,通过打开盖体向罐体8内填装粉料物料,填装完成后盖上盖体,当需要对罐体8内的粉粒物料卸载时,则通过出料口将粉粒物料进行卸载。
在仓库或者工地上对粉粒物料搬运的过程中,道路上通常会出现障碍物或轨道的情况,尤其在施工工地中,建筑材料的堆积,甚至出现路面松软的情况,滚轮式运输车将很难顺利的通过,强行通过的过程中也会出现强烈的震动或陷入泥土内,为了解决此种情况的出现,设计了粉粒物料搬运机器人,包括爬行机构9,所述罐体8安装在所述爬行机构9上,通过爬行机构9的移动来实现对粉粒物料进行搬运,即使遇到里面上有轨道或者堆积的障碍物,机器人跨越也能顺利的通过,即使在松软的里面上,也不会发生陷入到路面内无法继续前行的情况,实现对粉粒物料的运输,且减少外界来带的震动,提高运输效率。
下面,为了便于对本发明上述的工作过程做清楚的理解,下面对粉粒物料储料桶料盖的工作原理做详细阐述。
通过控制器来接收压力传感器的信号,并通过对控制器输入指令,通过控制器来控制第一往复气缸51和第二往复气缸52进行伸缩,带动第一转动板和第二转动板在放置块3上进行转动,来实现对进料口2的打开与封堵,当需要打开进料口2向罐体8内填装粉粒物料时,控制器控制第一往复气缸51和第二往复气缸52收缩,带动第一转动板和第二转动板向外转动,使进料口2打开,向进料口2内填装粉粒物料,当粉粒物料填装完成后,控制器控制第一往复气缸51和第二往复气缸52伸展,带动第一转动板与第二转动板在放置块3上进行转动相互靠近,并使第一盖板41与第二盖板42下表面上的第二密封块46与进料口2上的第一密封块6相互交叉并表面相互接触连接,当第一盖板41与第二盖板42相对的侧壁相互接触后,通过第一盖板41上的凹槽与第二盖板42上的弹性密封条48相互卡接来进一步密封,避免第一盖板41与第二盖板42之间有间隙发生泄漏,并在进料口2上端侧壁上安装有环形凸起7,所述第一盖板41与第二盖板42内侧壁上设置弧形凹槽49;通过环形凸起7卡接在弧形凹槽49内进一步进行密封。
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
- 粉粒物料储料桶料盖、物料储存罐及物料搬运机器人
- 粉粒物料运输车料盖及粉粒物料运输车