一种手套罗口扩张机构
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及手套机的技术领域,特别是一种手套罗口扩张机构。
背景技术
手套翻面机普遍采用的形式有:前、后手模式,凸、凹模式,脚踏式等。用手工翻手套的速度较慢,对操作工劳动强度要求也高,随着社会的发展及自动化水平的提高,客户对手套翻面机的要求也越来越高,为迎合市场及客户的需求,不同的生产厂家按照各自的思路正在不断研发及改进各种手套翻面机,以提高手套翻面机的生产效率及自动化水平。
基于此,提出本案申请。
发明内容
本发明的目的就是解决现有技术中的问题,提供一种手套罗口扩张机构,能够同时驱动两个机械爪装置,用于抓住手套罗口边侧,并对手套罗口进行扩张,便于手套自动翻面的顺利进行。
为实现上述目的,本发明提出了一种手套罗口扩张机构,包括导向板、限位固定板、拉伸机构和驱动机构,导向板与限位固定板连接;
所述拉伸机构分为能够开合且夹持手套罗口两侧的左拉伸机构、右拉伸机构,左拉伸机构、右拉伸机构沿驱动机构呈左、右对称设置,驱动机构驱动左拉伸机构、右拉伸机构相背或相对运动;
所述左拉伸机构和右拉伸机构均包括连接在限位固定板下方的限位块以及机械爪装置,限位块两边侧均设有相连的直行轨道及斜行轨道,两条斜行轨道呈逐渐收拢状分布;
机械爪装置包括前爪、后爪以及连接座,所述前爪和后爪经上轴位螺钉呈转动固定在连接座上;
所述驱动机构与连接座连接,并驱动其相对限位块做相背或相对运动,所述前爪和后爪上设有由拉簧互相拉紧的下轴位螺钉,所述拉簧拉紧下轴位螺钉与直行轨道或斜行轨道保持贴合,所述下轴位螺钉跟随连接座沿直行轨道和斜行轨道往复滑动能够完成前爪和后爪的开合动作,以夹持手套罗口边侧。
所述驱动机构包括左传动块和右传动块以及受驱动装置驱动以发生旋转的传动装置,所述左传动块和右传动块呈对称状分别与传动装置的同步带的两侧连接,正反转所述同步带使得设置于左传动块、右传动块上的左拉伸机构、右拉伸机构相背或相对运动。
作为优选,上轴位螺钉包括上前轴位螺钉及上后轴位螺钉,前爪、后爪分别沿上前轴位螺钉、上后轴位螺钉转动,下轴位螺钉包括下前轴位螺钉及下后轴位螺钉,下前轴位螺钉、下后轴位螺钉分别经下轴承后与前爪、后爪结合。
作为优选,所述下轴承包括下前轴承及下后轴承,拉簧设置于下前轴位螺钉、下后轴位螺钉之间,下前轴承、下后轴承设置于限位块的直行轨道或斜行轨道上。
作为优选,所述左传动块和右传动块的边侧开设有开槽,开槽底部开设有未通槽,顶块设置于传动块的未通槽,顶块的齿形部与传动装置中同步带的齿部相配合,并结合压板以压紧同步带。
作为优选,所述左传动块、右传动块的边侧分别开设有左开槽、右开槽,顶块包括左顶块及右顶块,左顶块、右顶块分别设置于左开槽、右开槽的底部未通槽。
作为优选,传动装置包括转动设于导轨座上的主同步轮和从同步轮以及张紧在主同步轮和从同步轮上的同步带,驱动装置固定在导轨座上并与所述主同步轮驱动连接。
作为优选,所述驱动装置包括箱体和蜗轮蜗杆组,驱动电机设置于箱体的右侧部,其驱动轴与蜗轮蜗杆组相连,主传动轴的一端与蜗轮蜗杆组相连,另一端与主同步轮相连。
作为优选,所述主传动轴的另一端经导轨座后与主同步轮结合,垫块设置于导轨座的右侧,从传动轴设置于从同步轮与垫块之间。
作为优选,所述导轨座上活络设置有左滑柱、右滑柱,左传动块、右传动块分别与左滑柱、右滑柱结合。
本发明的有益效果:
1、在拉伸机构中采用限位块与机械爪装置相配合的结构,利用驱动机构控制两套机械爪装置中下轴位螺钉沿限位块的直行轨道或斜行轨道运动,配合拉簧的设置,完成前爪和后爪的开合,达到抓住手套罗口两侧的目的;
2、在驱动机构中采用对称设置用于连接机械爪装置的左、右传动块,由同步带同时带动两个机械爪装置相对或相背运动,结合对手套罗口的抓取动作,实现对手套罗口进行拉伸及收缩;
3、本发明中由单一驱动机构同时完成对左拉伸机构和右拉伸机构的移动驱动动作,并在左拉伸机构及右拉伸机构中机械爪装置的移动过程中,不但完成对于手套罗口的抓取,同时通过完成对抓取后机械爪装置间的行程控制,达到罗口扩张的目的,提高了产品的自动化水平。
本发明的特征及优点将通过实施例结合附图进行详细说明。
附图说明
图1本发明的一种局部爆炸图;
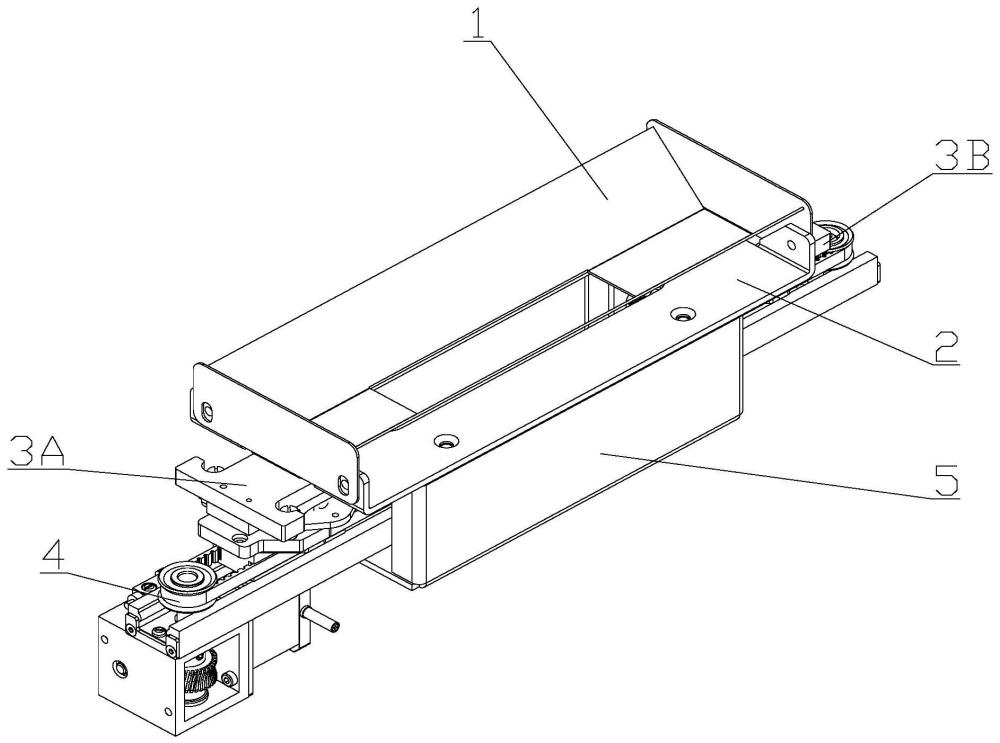
图2本发明的一种装配示意图;
图3本发明拉伸机构的一种爆炸图;
图4本发明拉伸机构的一种装配示意图;
图5本发明驱动机构的一种局部爆炸图;
图6本发明的一种工作示意图;
图中:1、导向板;2、限位固定板;3、拉伸机构;3A、左拉伸机构;3B、右拉伸机构;
31、限位块;31A、直行轨道;31B、斜行轨道;32、下前轴位螺钉;33、下前轴承;34、下前轴套;35、拉簧;36、前爪;37、上前轴套;38、后爪;39、连接座;310、上前轴承;311、上前轴位螺钉;312、盖板;313、上后轴位螺钉;314、上后轴承;315、上后轴套;316、下后轴套;317、下后轴承;318、下后轴位螺钉;
330、机械爪装置;
31C、左限位块;330A、左机械爪装置;
31D、右限位块;330B、右机械爪装置;
4、驱动机构;41、右压板;42、右顶块;43、右传动块;43A、右开槽;44、左传动块;44A、左开槽;45、左顶块;46、左压板;
47、传动装置;471、主同步轮;472、导轨座;473、同步带;474、垫块;475、从同步轮;476、从传动轴;477、右滑柱;478、左滑柱;
48、驱动装置;481、驱动电机;482、箱体;483、螺轮蜗杆组;484、主传动轴;
5、拉伸固定板。
具体实施方式
参阅图1至图5,本发明包括导向板1、限位固定板2、拉伸机构3和驱动机构4,导向板1与限位固定板2连接,限位固定板2位于导向板1的下方;
所述拉伸机构3分为能够开合且夹持手套罗口两侧的左拉伸机构3A、右拉伸机构3B,左拉伸机构3A用于夹持手套罗口左边侧,右拉伸机构3B用于夹持手套罗口右边侧,左拉伸机构3A、右拉伸机构3B沿驱动机构4呈左、右对称设置,驱动机构4驱动左拉伸机构3A、右拉伸机构3B相背或相对运动,以便对手套罗口进行夹持和扩张;
所述左拉伸机构3A和右拉伸机构3B均包括连接在限位固定板2下方的限位块31以及机械爪装置330,限位块31两边侧均设有相连的直行轨道31A及斜行轨道31B,两条斜行轨道31B呈逐渐收拢状分布,两侧的直行轨道31A呈平行状分布;
机械爪装置330包括前爪36、后爪38以及连接座39,所述前爪36和后爪38经上轴位螺钉呈转动固定在连接座39上;
所述驱动机构4与连接座39连接,并驱动其相对限位块31做相背或相对运动,所述前爪36和后爪38上设有由拉簧35互相拉紧的下轴位螺钉,所述拉簧35拉紧下轴位螺钉与直行轨道31A或斜行轨道31B保持贴合,当驱动机构4驱动连接座39移动后,所述下轴位螺钉跟随连接座39沿直行轨道31A和斜行轨道31B往复滑动能够完成前爪36和后爪38的开合动作,以夹持手套罗口边侧。
所述驱动机构4包括受驱动装置驱动以发生旋转的传动装置47和左、右对称设置于传动装置47的传动块,传动块分为左传动块44及右传动块43,所述左传动块44和右传动块43呈对称状分别与传动装置47的同步带473的两侧连接,正反转所述同步带473使得设置于左传动块44、右传动块43上的左拉伸机构3A、右拉伸机构3B相背或相对运动,对手套罗口进行拉伸及收缩。
左拉伸机构3A、右拉伸机构3B分别设置于限位固定板2的下部左、右侧,拉伸固定板5与限位固定板2结合,驱动机构4设置于拉伸固定板5。
具体的,上轴位螺钉分别经连接座39后与前爪36、后爪38结合,本实施例中,上轴位螺钉包括上前轴位螺钉311及上后轴位螺钉313,前爪36、后爪38分别沿上前轴位螺钉311、上后轴位螺钉313转动,盖板312设置于连接座39的上部,下轴位螺钉包括下前轴位螺钉32及下后轴位螺钉318,下前轴位螺钉32、下后轴位螺钉318分别经下轴承后与前爪36、后爪38结合。
具体的,下轴承包括下前轴承33及下后轴承317,拉簧35设置于下前轴位螺钉32、下后轴位螺钉318之间,下前轴承33、下后轴承317设置于限位块31的直行轨道31A或斜行轨道31B上,前爪36、后爪38的爪部分别开设有爪齿,用于夹持手套罗口边侧。
具体的,左传动块44和右传动块43的边侧开设有开槽,开槽底部开设有未通槽,顶块设置于传动块的未通槽,本实施例中,左传动块44、右传动块43的边侧分别开设有左开槽44A、右开槽43A,顶块包括左顶块45及右顶块42,左顶块45、右顶块42分别设置于左开槽44A、右开槽43A的底部未通槽,顶块的齿形部与同步带473的齿部相配合,并结合压板以压紧同步带473。
本实施例中,压板包括右压板41及左压板46,左压板46、右压板41分别与左传动块44、右传动块43相结合并压紧同步带473。
具体的,驱动装置48包括箱体482和蜗轮蜗杆组483,驱动电机481设置于箱体482的右侧部,其驱动轴与蜗轮蜗杆组483相连,蜗轮蜗杆组483与主传动轴484的一端相连,另一端与主同步轮471相连。
具体的,传动装置47包括导轨座472、主同步轮471、从同步轮475以及所述同步带473,导轨座472通过左边侧部设置于箱体482,主传动轴484的另一端经导轨座472后与主同步轮471结合,导轨座472的右侧设置有垫块474,主同步轮471与从同步轮475相对应设置,从同步轮475与垫块474之间连接有从传动轴476,同步带473连接于主同步轮471、从同步轮475之间,驱动装置固定在导轨座472上并与所述主同步轮471驱动连接。
具体的,本实施例中,导轨座472的左、右侧分别活络设置有左滑柱478、右滑柱477,左传动块44、右传动块43分别与左滑柱478、右滑柱477结合。
本发明的工作原理:参阅图6,蜗轮蜗杆组483在驱动电机481的驱动轴带动下发生转动,也带动主传动轴484及主同步轮471转动,并使得同步带473及从同步轮475产生同步运动,同时同步带473也带动右传动块43及左传动块44相背或相对运动,也使得右拉伸机构3B、左拉伸机构3A产生相背或相对运动;开始时,左机械爪装置330A、右机械爪装置330B分别处于左限位块31C、右限位块31D的斜行轨道,与其相对应的前、后爪分别处于打开状态,此时前、后爪爪部内设置有手套罗口两边侧,接着左拉伸机构3A、右拉伸机构3B产生相背运动时,由于左拉伸机构3A的左限位块31C、右拉伸机构3B的右限位块31D分别固设于限位固定板的左、右侧,左机械爪装置330A、右机械爪装置330B分别沿左限位块31C、右限位块31D的斜行轨道运动,前、后爪爪部也慢慢收拢,接着左机械爪装置330A、右机械爪装置330B分别退出左限位块31C、右限位块31D的斜行轨道,并进入左限位块31C、右限位块31D的直行轨道,同时处于手套罗口两边侧的前、后爪分别夹紧手套罗口边侧,接着左机械爪装置330A、右机械爪装置330B继续沿直行轨道运动,手套罗口在左、右边侧被拉伸,再接着驱动电机481反向转动,左机械爪装置330A、右机械爪装置330B分别沿左限位块31C、右限位块31D的直行轨道朝斜行轨道运动,接着分别进入左限位块31C、右限位块31D的斜行轨道,前、后爪爪部打开,释放手套罗口边侧,完成手套罗口的扩张;接着重复上述工作流程。
上述实施例是对本发明的说明,不是对本发明的限定,任何对本发明简单变换后的方案均属于本发明的保护范围。