用于支持使用者的至少一个臂的装置
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种用于支持使用者的至少一个臂的装置,其中,该装置具有:至少一个臂支撑元件,该臂支撑元件分别具有一个用于分别佩戴到一个臂上的臂壳;至少一个无源促动器,该促动器设置为用于施加力到所述臂支撑元件中的至少一个上,在该装置被佩戴的状态下,通过该力支持在臂壳中的臂向上运动;以及用于要施加的力的至少一个配对支承件。
背景技术
这种装置例如由US 2016/0081871 A1已知。该装置具有以能够绕着使用者的躯体施加的皮带形式构造的配对支承元件。在该配对支承元件上存在两个沿着背部延伸至肩部的支撑杆,所述支撑杆在使用者肩部上方和侧面在使用者肩部旁分别与一个铰接部连接,使得能够抬起臂。在相应的铰接部上布置有弹簧元件,通过该弹簧元件可以将向上指向的力施加到臂壳上,使得例如在举起重物或在超过头部工作时实现对臂的支持。如果应降低臂,则必须通过臂施加压力到臂壳上,使得臂下降,所述压力超过由弹簧元件施加的力。
由WO 2014/0093408 A2和US 9,427,865 B2已知类似的装置,其中,作为起无源促动器作用的机械蓄能器分别设置有一个弹簧、尤其是拉力弹簧,该弹簧与鲍登线(Bowdenzug)连接。该鲍登线通过偏转轮被引导,使得在臂枢转时(这意味着臂支撑元件相对于配对支承元件运动),弹簧被拉伸,使得给机械蓄能器蓄能。
由EP 3 156 193 A1已知一种有源装置,该装置在超过头部工作时支持臂。臂壳通过多个不同的铰接部和框架元件相互连接。由此,肩关节能执行的尽可能多的运动借助佩戴的装置也能够实现。例如由WO 2014/195373 A1和US 2016/339583 A1已知另外的支撑装置,这些支撑装置尤其在举起重物或在超过头部工作时进行支持。
在所有这些装置中不利的是,持久地存在施加到各臂壳上的力。这尤其意味着,在佩戴装置的情况下,臂支撑元件处于向上伸展的位置中,使得臂支撑元件为了将臂放入到各个臂壳中而必须首先被压向下。这是麻烦的并且需要空间,从而存在如下危险:以伸出的臂支撑元件碰撞到其它物体。
此外,在将装置脱下的时刻(在此将臂从臂壳移除)导致臂支撑元件向上快速运动,由此可以引起其它物体损坏或甚至引起使用者受伤。
由US 2017/0173783 A1已知一种作用原理,其中不出现该问题。与在这里所说明的装置不同地,促动器不能施加力到臂支撑元件上,通过该力支持在臂壳中的臂向上运动。而是机械弹簧仅被用于使向下运动变得困难。如果布置在该装置中的臂未被降低,因此也没有力起作用。因此,尤其在举起重物时,与其它之前所述的实施方式不同地,该装置没有帮助。
发明内容
因此,本发明所基于的任务在于,克服或至少减少这些缺点。
本发明通过根据权利要求1前序部分所述的装置来解决所提出的任务,该装置的特点在于,其具有至少一个操纵元件,通过操纵该操纵元件使得促动器被带到第一状态和第二状态中,在第一状态中,促动器施加力到臂支撑元件上;在第二状态中,促动器施加更小的力或不施加力到至少一个臂支撑元件上。优选地,该装置具有至少一个力传递元件,其设置为用于将反作用力从至少一个臂支撑元件传递到配对支承元件上。
在该装置未被佩戴的状态下,促动器有利地处于第二状态中,使得特别优选地没有力被施加到臂支撑元件上。因此,装置的使用者可以佩戴该装置并且将臂支撑元件连同臂壳带到对于佩戴最舒适的位置中。在此,臂支撑元件通常向下定向,使得各个臂能够容易地被放入到臂壳中。一旦臂贴靠在臂壳中并且臂壳必要时围绕着臂被闭合,则装置处于佩戴状态中。在该情况下,可以通过操纵至少一个操纵元件将促动器带到第一状态中,其方式是:促动器将支持力施加到臂支撑元件中的至少一个上。
优选地,促动器在第一状态下施加最大的力到至少一个臂支撑元件上。因此,该第一状态优选地如此限定,使得通过促动器、尤其通过操纵所述至少一个操纵元件不能进一步提高力。
优选地,促动器能够通过操纵至少一个操纵元件多级地或无级地从第一状态被带到第二状态中,其中,通过促动器施加到至少一个臂支撑元件上的力减小。特别优选地,促动器能够通过操纵至少一个操纵元件被带到至少一个中间状态、但优选多个中间状态中,使得能够多级地或无级地调整通过促动器施加到至少一个臂支撑元件上的力。操纵元件优选布置在臂壳的下侧上、布置在一铰接部上(臂支撑元件和力传递元件通过该铰接部可彼此枢转地布置)或在侧面外部布置在臂壳或臂支撑元件上。臂壳的下侧在此是指在佩戴状态下背离使用者臂的一侧。该臂壳的下侧在臂未抬起时布置在躯体与臂之间。侧面外部是指在佩戴状态下在臂未抬起时背离躯体的一侧。
以这种方式可以自由选择由促动器施加的力并且使该力匹配于装置佩戴者的个人需求。如果例如促动器作用到臂支撑元件上的力作用点相对于枢转轴线移动,臂支撑元件例如能够绕着该枢转轴线相对于力传递元件枢转,则相应的杠杆也变化,使得改变所施加的力矩。这共同理解为“所施加的力”的改变。
有利地,至少一个促动器具有至少一个弹性元件,该弹性元件是可松弛的,其方式是:通过操纵至少一个操纵元件将促动器从第一状态带到第二状态中。弹性元件例如可以是弹簧,例如拉力弹簧、弹性件,例如拉力器、或这样的其它元件,其优选在促动器的第一状态下预紧并且负责所施加的力。
有利地,在弹性元件的端部上存在固定元件,该固定元件通过操纵至少一个操纵元件是可运动的、尤其是可枢转或可移动的。优选地,弹性元件的端部的该运动被阻尼地,例如通过弹簧元件、阻尼元件和/或受控施加的摩擦力实现。由此防止例如可以是拉力器的弹性元件失控地弹回。
优选地,弹性元件的端部被锁定在第一位置中,在该第一位置中,促动器也施加最大力到臂支撑元件上。优选地,这在达到第一位置时并且通过达到第一位置而自动地发生。为此例如可以使用修改的“推-推”机构和/或切换杠杆。通过再次操纵操纵元件(“套上
优选地,存在例如呈具有卡锁元件和卡锁侧凹部(Rasthinterschneidung)的卡锁装置形式的保险装置,通过该保险装置保证:仅当佩戴该装置时,才能够将促动器从第一状态带到第二状态中,和/或反之亦可。
操纵元件优选是自锁的。
操纵元件例如可以是滑轮组、绳或皮带,其布置在固定元件上。固定元件本身例如沿着也能够用作用于由促动器施加的力的力传递元件的杆可移动地支承。操纵元件的端部能够固定在装置的另一构件上,例如绕着躯体施加的皮带。为此例如存在呈按钮或尼龙搭扣元件形式的形状锁合元件。在佩戴该装置的情况下,操纵元件的该端部例如未固定在装置的另一构件上或固定在这样的位置中,使得弹性元件是松弛的。在佩戴该装置之后,如果臂壳绕着臂闭合或臂至少布置在臂壳中,可以施加拉力到操纵元件上,由此移动固定元件,所述弹性元件的端部位于该固定元件上。由此也移动弹性元件的端部,并且以这种方式拉长并因此拉紧弹性元件。在该位置中,操纵元件的端部通过上述机构固定,使得固定元件和从而弹性元件的端部也是固定的。在这种情况下,促动器处于第一状态下并且施加力到臂支撑元件上。
如果应脱下该装置,则可以松开操纵元件的端部。通过弹性元件的力移动该弹性元件的端部,在该端部上存在固定元件和操纵元件,使得弹性元件松弛,并且促动器处于第二状态下。随后可以无危险地脱下该装置,而不会导致突然的运动。
特别有利地,如果使用者已经佩戴了该装置,则操纵元件可以被装置使用者操纵。
替代构造为拉伸元件,例如皮带或绳的操纵元件,也可以存在偏转杠杆(Umlenkhebel)、拉紧杠杆(Spannhebel)或用于使弹性元件的端部移动的其它装置。该装置优选是自锁的。
替代或附加地,操纵元件可以构造为旋钮。操纵元件的这种构型例如由公司BOA提供。
对此替代或附加地,配对支承件具有至少一个配对支承元件和至少两个力传递元件,其中,每个臂支撑元件能够绕着枢转轴线枢转地布置在力传递元件之一上。配对支承元件例如可以是胯部安全带(其自然是可填塞的)或是其它布置在使用者身体上的元件。在该配对支承元件上可以存在两个力传递元件,它们例如可以是向上指向的杆。在杆的与配对支承元件相对置的端部上存在带有枢转轴线的枢转铰接部,通过该枢转铰接部将对应的臂支撑元件布置在力传递元件上。
优选地,由促动器施加的力沿着一力方向延伸,该力方向在促动器的第二状态下比在促动器的第一状态下更接近枢转轴线地延伸。该力本身例如作用在杠杆上,该杠杆与臂支撑元件或臂支撑元件的一部分固定连接,并与枢转铰接部的枢转轴线间隔开。以这种方式通过由促动器施加的力将力矩绕着枢转轴线施加到臂支撑元件上,该力矩导致支持力。力作用在其上的杠杆元件越长,则力矩和从而引起的力越大。通过操纵元件有利地可以是,改变该力方向并且在促动器的第二状态下更接近枢转轴线。特别有利地,力方向在第二状态下穿过枢转轴线延伸。如果至少一个无源促动器例如是弹性元件,例如弹簧或拉力弹簧,则在该情况下不必要的是,使弹性元件的端部移动并且使促动器松弛。而是如此改变促动器的方向或仅改变所施加的力的方向,使得该力从力作用点朝枢转轴线的方向延伸,该力作用点例如布置在上述杠杆上。这样的力不会产生绕着枢转轴线的力矩,使得没有支持力被施加到臂支撑元件上。
有利地,促动器具有弹性元件,在该弹性元件上布置有至少一个拉伸元件,如果促动器处于第一状态下,则通过操纵操纵元件能够施加拉力到所述拉伸元件上。这种拉伸元件例如是绳索、金属线或皮带。操纵元件例如可以是卷绕机构,通过该卷绕机构能够卷绕拉伸元件。以这种方式可以使例如布置在臂支撑元件、尤其臂导轨(Armschiene)上的操纵元件与在拉伸元件和弹性元件间的连接部之间的间距变小。由此可以通过各个构件的巧妙布置使拉伸元件与弹性元件之间的连接更接近枢转铰接部的枢转轴线地运动并且在最优情况下与该枢转轴线重合。
在该实施例中,如果应使促动器返回到第一位置中,则例如足够的是,可以松开卷绕机构,并且通过总是还拉紧的弹性元件将拉力沿相反的方向施加到拉伸元件上。由此使促动器运动返回到第一状态中。
有利地,臂壳分别具有一个闭合元件,通过该闭合元件,臂壳能够绕着使用者的臂闭合。以这种方式防止,臂无意地从各臂壳中滑出或运动出来,这将导致臂支撑元件的失控运动。
特别有利地,仅当促动器处于第二状态中时,闭合元件才可以被打开。为此,例如可以存在机械锁定或解锁。以这种方式可靠地防止,如果促动器处于第一状态中,则可以脱下该装置。
特别优选地,该装置具有两个分别带有一个臂壳的臂支撑元件并且特别优选地具有两个力传递元件,所述臂壳用于分别佩戴到一个臂上。已经表明为特别有利的是,该装置还具有至少两个促动器,以便能够单独地调整要施加到不同臂支撑元件上的支撑力。优选地,所述促动器能够分别通过至少一个操纵元件、特别优选彼此独立地被带到第一状态和第二状态中,其中,促动器在第二状态下比在第一状态下施加更小力的或不施加力到臂支撑元件上。
附图说明
下面借助附图更详细地阐述本发明的实施例。附图示出了:
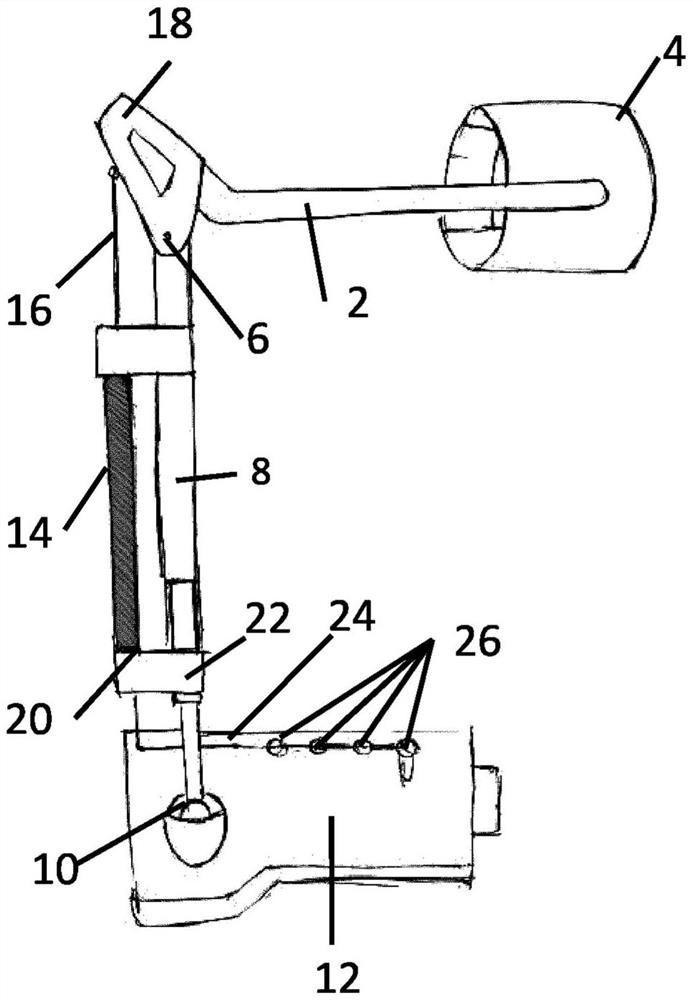
图1根据本发明的第一实施例的装置的一部分的示意图;
图2一个替代实施方式的示意图;
图3至5另外的实施方式;
图6本发明的另一实施方式的示意图;
图7具有在第二状态下的促动器的图6的装置;
图8另一实施例的示意图;
图9具有在第二状态下的促动器的图8的示图;
图10保险装置的示意图;和
图11至16不同实施方式的示意图。
具体实施方式
图1示意地示出根据本发明的第一实施例的装置的一部分。示出了臂支撑元件2,臂壳4位于在该支撑元件上。通过枢转铰接部6,臂支撑元件2可枢转地布置在力传递元件8上,所述力传递元件以其下端部10布置在配对支承元件12上。配对支承元件12是绕着装置佩戴者的身体施加的腹部安全带或胯部安全带。
在力传递元件上存在无源促动器14,该促动器在所示的实施例中作为弹性元件示出。该弹性元件通过鲍登线16与杠杆元件18连接,在该杠杆元件上存在臂支撑元件2。无源促动器14的端部20随着固定元件22可移动地布置在力传递元件8上。在固定元件22上存在呈带或皮带形式的操纵元件24,通过该操纵元件可以将拉力施加到固定元件22上和从而施加到无源促动器14的端部20上。在不同的固定位置26中,在配对支承元件12上布置有形状锁合元件,例如尼龙搭扣元件、按钮或其它固定元件,使得操纵元件24能够在不同位置处固定在配对支承元件12上。由此,一方面能够将无源促动器从在图1所示的第一状态带到第二状态中,并且反之亦可,而另一方面能够调整通过无源促动器施加的预紧。
图2示出一个替代的实施方式。布置在无源促动器14上的鲍登线16通过偏转轮28引导并以一端部布置在拉紧杠杆30上。固定元件22在所示的实施例中以套环(Schlaufe)的形式存在。拉紧杠杆30处于第一位置中,在该第一位置中,无源促动器14被拉紧。如果使拉紧杠杆30沿着箭头32运动,则无源促动器14松弛并且因此被转移到第二状态中。
图3、4和5示出用于相应操纵元件的另外的实施例。在图3中,在力传递元件8上可移动地支承有固定元件22,在该固定元件上存在无源促动器14的端部20。通过能够绕着枢转轴线34枢转地布置在力传递元件8上的拉紧杠杆30可以使固定元件22移动,并且因此将无源促动器14带到第一状态或第二状态中。
在图4中示出另一实施方式。力传递元件8由子元件36组成,所述子元件能够绕着枢转轴线34枢转地彼此支承。在图4的左部分中,两个子元件36构成力传递元件8的直线实施方式,由此平行于力传递元件布置的无源促动器14被拉伸和从而被拉紧。在图4的右部分中,力传递元件8是弯折的,使得无源促动器14缩短并且促动器因此松弛。在图4的左部分中,促动器14因此处于第一状态中,而在图4的右部分中,促动器14处于第二状态中。
图5示出另一实施方式,其中,在力传递元件8中布置有四个子元件36,这些子元件绕着两个铰接轴线34可枢转地支承。在所述两个铰接轴线之间存在拉紧元件38,通过拉紧元件38可以改变两个枢转轴线34之间的间距。在所示的实施例中,平行于力传递元件8布置的无源促动器处于第二状态中。如果在两个枢转轴线34之间的间距被减小,则在图5中力传递元件8的从上向下的伸展量增大,并且平行设置的无源促动器14被拉紧并因此被转移到第一状态中。
图6示出另一替代构型。无源促动器14作用在杠杆元件18上,该杠杆元件与臂支撑元件2连接。臂支撑元件2可枢转地布置在力传递元件8上。操纵元件24在所示的实施例中位于臂壳4上,并且设置为用于卷绕拉伸元件40。通过连接器42将拉伸元件40布置在无源促动器14上。在图6中,促动器14处于第一状态中。由无源促动器14施加到杠杆元件18上的拉力导致绕着枢转轴线的力矩,臂支撑元件2绕着该枢转轴线布置在力传递元件8上。由此,施加支持力到臂支撑元件2上。图7示出具有在第二状态下的促动器14的示图。操纵元件24已经卷绕拉伸元件40的一部分并且因此将拉力施加到连接器42上。可看到,无源促动器14的作用在杠杆元件18上的上部分现在直接指向枢转轴线,臂支撑元件2能够相对于力传递元件8绕着该枢转轴线枢转。所施加的力因此不会导致力矩。
此外,在图6和7中可看到,作用点44可移动地构造在为此设置的长形孔中。由此可以调整支持力的数值。
图8示出对图6和7中的示图的一个替代实施方式。在此,拉伸元件40也在臂壳4上与操纵元件24连接。然而,拉伸元件40现在作用在作用点44上,无源促动器14也作用在该作用点上。在图8中,无源促动器14处于第一状态中。如果现在由拉伸元件40施加的拉力被减小,则未示出的另一弹簧使作用点44朝向枢转轴线移动。由此减小了所施加的力,并且无源促动器14处于第二状态中。这在图9中示出。
图10示出保险装置的示意性视图,如该保险装置可被用于在此所说明类型的装置中。
在图10的各左部分中存在操纵元件24的示意性俯视图,该操纵元件例如可以构造为旋钮或所谓的“BOA”元件。在图10的各左部分中,操纵元件24在侧视图中示出。操纵元件24设置为用于卷绕或展开在图10的各右部分中所示的拉伸元件40并且因此将促动器从第一状态带到第二状态中。图10的上部分示意地示出在佩戴装置和臂壳4闭合时的状况,所述臂壳在图10中出于清楚的原因未示出。臂壳4在所示的实施例中通过皮带闭合,该皮带的插头46示意地示出。在图10的上部分中,在左上方,插头46在关闭状态下示出。该插头被销48保险,该销在图10的左上方示图中垂直于制图平面地延伸。在该状态下,插头46将保护罩50压到左上方示出的位置中,该保护罩也可以布置在臂壳上,使得操纵元件24是可接触到的。在该状况下,可以操纵操纵元件24并且使拉伸元件40运动。在拉伸元件40上存在球体52,一旦拉伸元件40通过操纵元件24被卷绕或展开,所述球体就一起运动。销48也在图10的右部分中示出。该销位于承载元件54上。在图10的上部分中可看到,销48接合在插头46的示意性示出的部分中并且因此防止插头46能够运动。
在图10的下部分中示出另一状况。在图10的下半部的右部分中示出:球体52向右运动,其方式是:操纵元件24被操纵并且拉伸元件40被卷绕。在此,球体52与保险元件56接触,该保险元件具有斜接触面。通过操纵操纵元件24使得球体52向左运动,并且该球体由于斜接触面而将保险元件56向下压并且从而也将承载元件54和位于该承载元件中的销48向下压。由此,该球体与插头46脱离接合。这在图10的左下部分中通过空白示出的接合开口58示出。在该状态下,插头46可以如通过箭头在图10的下部分中所示的那样向下运动并且因此可以打开未示出的臂壳4。由此,保护罩50移动到图10的下部分中所示的位置中,使得操纵元件24不再能接触到并且不能运动。
通过该保险装置实现不同的效果。
仅当保护罩50处于在图10的上部分所示的位置中时,才可以操纵操纵元件24。然而,这仅在以下情况中才是可能的:所述保护罩已经被插头46移动并且该插头优选被销48锁止。促动器14因此仅在插头46插上并且臂壳4因此可靠地贴靠在佩戴者的臂上时,才能够通过操纵元件24被带到第一状态中。否则,在所示的优选构型中不能够将无源促动器带到第一状态中和从而将所施加的力提升到其最大水平。
此外,在所示的实施例中,通过球体52和保险元件56的共同作用实现:仅当球体52处于在图10的下部分中所示的位置中、即达到端部位置时,才能够移开插头46和从而打开臂壳4。该端部位置有利地是第二状态,在该第二状态下,由无源促动器施加到臂支撑元件上的力最小。
图11示出根据本发明的另一实施例的装置的局部。臂支撑元件2通过铰接部6可枢转地布置在力传递元件8上。杠杆元件18与臂支撑元件2连接,在该杠杆元件上,无源促动器14作用在作用点44上。杠杆元件18通过耦合铰接部60与臂支撑元件2是可松开的或至少沿箭头32的方向是可折叠的。由此,无源促动器14松弛并且因此没有支持力再被传递到臂支撑元件2上。在力传递元件8与臂支撑元件2重新耦合的情况下,可以借助布置在力传递元件8上的拉力带固定铰接部6。
图12示出根据本发明的另一实施例的装置的局部。在此,装置在图12的左部分中处于第一状态中,而在图12的右部分中处于第二状态中。在两个部分中可看到力传递元件8、臂支撑元件2以及位于它们之间的带有枢转轴线的枢转铰接部6,上述两个元件能够绕着该枢转轴线彼此枢转。此外示出杠杆元件18,在该杠杆元件上,无源促动器14作用在作用点44上。在杠杆元件18和臂支撑元件2之间存在可锁定的耦合铰接部60。在图12的左部分中,耦合铰接部60是锁定的,使得臂支撑元件2不能相对于杠杆元件18枢转。由促动器14传递到杠杆元件18上的力(该力导致绕着枢转轴线沿着6的所希望的力矩)因此通过锁定的耦合铰接部60被传递到臂支撑元件2上。在图12的右部分中,耦合铰接部是解锁的,使得臂支撑元件2能够相对于杠杆元件18枢转。因此,由出于清楚的原因在图12的右部分中未示出的无源促动器施加的力不传递到臂支撑元件2上,使得在这种情况下将促动器带到第二状态中。
图13示出类似的结构,其中,杠杆元件18能够从用虚线表示的并且促动器14处于第一状态下的第一位置被带到用实线表示的中间位置中。在这种情况下,无源促动器14处于相对于第一状态松弛的第二状态中,使得明显更小的力或甚至完全没有力被传递到杠杆元件18上。耦合铰接部60在所示的实施例中与枢转铰接部6重叠。在此,在杠杆元件18和臂支撑元件2之间也产生可锁定和可解锁的连接。
图14示出另一构型。在此,杠杆元件18也与臂支撑元件2连接,并且能够与该臂支撑元件一起绕着枢转铰接部6的枢转轴线相对于力传递元件8枢转。然而,杠杆元件18相对于臂支撑元件2是不可运动的。作用点44沿着导轨62可移动地构造,无源促动器14在所述作用点处作用在杠杆元件18上。由此可以改变在作用点44与枢转铰接部6的枢转轴线之间的间距,由此可以缩短或延长由促动器14施加到杠杆元件18上的力相对于该枢转轴线的杠杆臂。由此也改变所施加的力矩并且因此最后也改变由促动器14施加到臂支撑元件2上的支持力。如果在图14所示的实施例中作用点44移动至右侧止挡上,则该作用点直接位于枢转铰接部的枢转轴线上,使得不再传递力矩。
图15和16示出图14的装置的一个构型,其中,操纵元件这样地构造,使得该操纵元件自动地被所述装置操纵并且根据臂支撑元件2相对于力传递元件8的位置将促动器带到第一状态或第二状态中。
该结构基本上相应于在图14中所示的实施方式,区别在于,作用点44不是可锁定的,而是可以沿着导轨62自由滑动。在图15中示出抬起的臂的状况。可看到,臂支撑元件2从杠杆元件18起向上指向。通过由促动器14施加的力,作用点44滑到所示的位置中,直至该促动器止挡在止挡环64上。当然,其它类型的止挡也是可行的。仅重要的是,作用点44沿着导轨62朝该方向的运动被一止挡限制。该止挡例如以所示的止挡环64形式能够沿着导轨62移动并且在该导轨处或在该导轨62上是可锁定的。因此,通过由促动器施加的力,作用点44运动到最大远离枢转铰接部6的枢转轴线的位置。以这种方式使所施加的力矩和从而也施加到臂支撑元件2上的力最大化。优选地,作用点在至少一个所希望的位置、优选在每个所希望的位置中是可锁定的,使得该作用点在不松开锁定的情况下不能沿着导轨62滑动。该锁定例如可以通过夹紧钳、剪刀夹(Scherenklemme)、以磁方式或通过锁定元件,例如可插入到锁定孔中的销钉实现。
图16示出在臂下降时的状况。可看到,臂支撑元件2从枢转铰接部6起向下指向。在这种情况下,作用点44通过由促动器14施加的力沿相反方向移动,如这在图16中所示的那样。在此也存在限制移动和作用点44运动的止挡。在所示的实施例中,作用点44在这种状况下不但更接近枢转铰接部的枢转轴线,这原则上将足以限定第二状态,而且该作用点与枢转轴线重叠,使得所施加的力矩消失。
2 臂支撑元件
4 臂壳
6 枢转铰接部
8 力传递元件
10 下端部
12 配对支承元件
14 无源促动器
16 鲍登线
18 杠杆元件
20 端部
22 固定元件
24 操纵元件
26 固定位置
28 偏转轮
30 拉紧杠杆
32 箭头
34 枢转轴线
36 子元件
38 拉紧元件
40 拉伸元件
42 连接器
44 作用点
46 插头
48 销
50 保护罩
52 球体
54 承载元件
56 保险元件
58 接合开口
60 耦合铰接部
62 导轨
64 止挡环